一、安装相关软件包
安装uvc camera
sudo apt-get install ros-kinetic-uvc-camera
安装image相关功能包
sudo apt-get install ros-kinetic-image-*
sudo apt-get install ros-kinetic-rqt-image-view要记得把kinetic换成 你自己的ros版本。
二、启动ros,调用摄像头
- 在终端1中启动ros
roscore- 在终端2中运行uvc_camera节点,电脑相机开始工作
rosrun uvc_camera uvc_camera_node
- 在终端3中查看话题消息
rostopic list
- 在终端3中查看图像的信息
rostopic echo /camera_info- 打开rviz完成相关配置
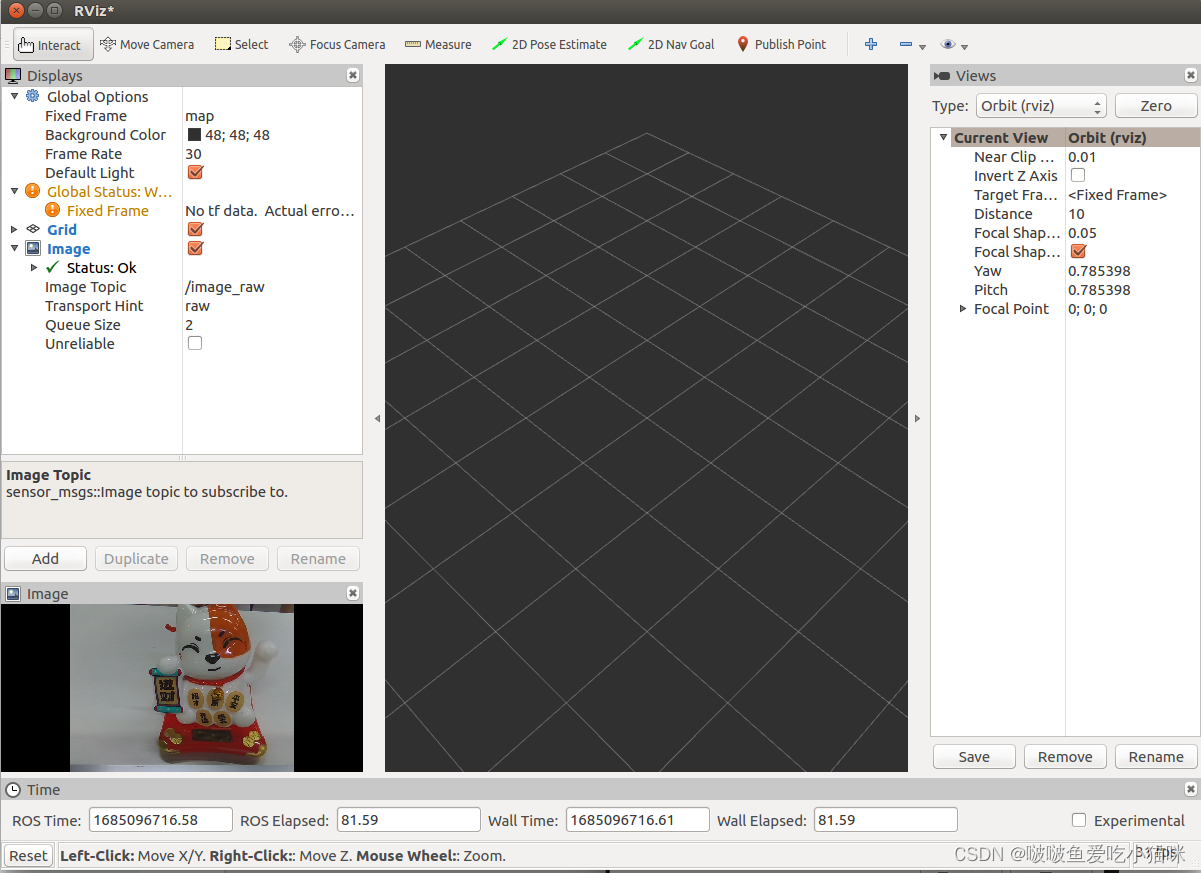
rosrun rviz rviz点击左下角“Add”——>点击“By display type”——>点击“image”——>点击“ok”

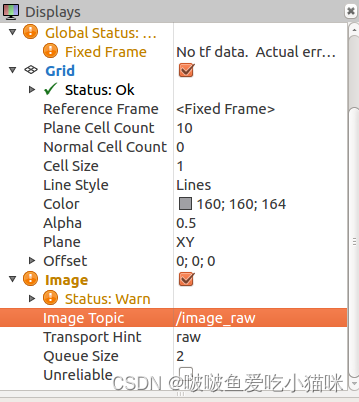
将左侧栏目的“Image”下的“Image Topic”的参数改成“/image_raw”
配置好之后就会发现rviz左下角界面出现相机捕捉的画面