什么是感知机——图文并茂,由浅入深
文章目录
引言
生活中常常伴随着各种各样的逻辑判断,比如看到远方天空中飘来乌云,打开手机看到天气预报说1小时后40%的概率下雨,此时时候我们常常会做出等会下雨,出门带伞的判断。
上述思考过程可以抽象为一个”与“的”神经逻辑“。当”看到乌云“和”天气预报40%下雨“同时满足的时候,我们才会做出”等会下雨,出门带伞“的判断;假如只看到”乌云“,但天气预报说0%的概率下雨,抑或是没看见乌云,天气预报40%的概率下雨,我们会做出等下不会下雨的判断。
现在我们抽象一下刚刚的过程。
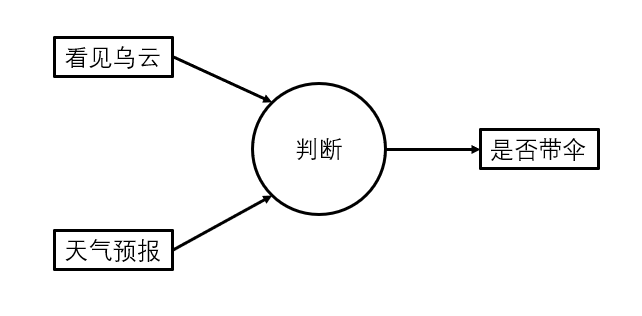
逻辑的输入有两个:看见乌云、天气预报。经过逻辑判断,决定是否带伞。
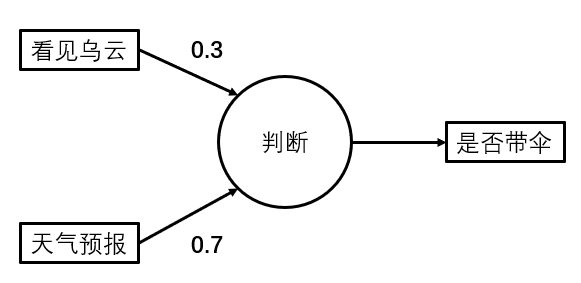
在判断时,有人会更加相信肉眼所见的乌云,天气预报只是辅助,毕竟天气预报经常报不准;有人更加信任天气预报,心想谁知道这个乌云会不会等会飘走呢,有云又未必下雨。因此我们引入”信任度“这个概念。我更加信任天气预报,如果完全相信是1(也可以是2、3、3.4等等),那么我给”天气预报“0.7的信任度,给”看见乌云“0.3的信任度。
相信读者一定有了一定概念,但是目前这样笼统的”判断“和”信任度“没有办法实际解决问题。主要有以下疑问:
- ”信任度“是如何作用于判断呢?
- ”判断”是如何进行的?
- 笔者讲的这个判断和感知机什么关系?
下面我们将问题数学化,来定量得确定出这其中的逻辑关系,这个过程通常被叫做“数学建模”。
生活中有许许多多的判断,有的如同上述是否带伞一样简单,有的如同解答高数题一样复杂。这些判断都是根据许许多多外界环境输入到我们人脑中的信号,经过头脑中复杂的神经网络得出来的。
上面的例子是一个非常简单的判断,可以想象如果这种简单的判断以成千上万的数量组合,便可以形成一个非常庞大且复杂的“神经网络”,能够处理的事情。组成这张神经网络的单位,我们称之为“神经元”,粗略得说,我们也可以叫他“感知机”。
感知机的引入
宝宝版
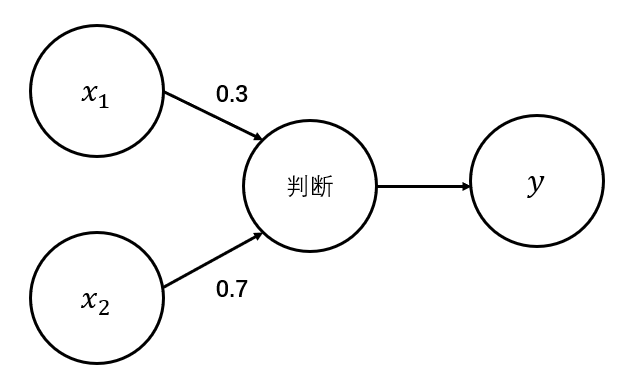
分别用 x 1 x_1 x1表示“看见乌云”, x 2 x_2 x2表示“天气预报”。如果看见了乌云,那么 x 1 = 1 x_1=1 x1=1否则 x 1 = 0 x_1=0 x1=0;同样的,如果天气预报说40%概率下雨, x 2 = 1 x_2=1 x2=1,如果是0%的概率下雨, x 2 = 0 x_2=0 x2=0。
用 y y y表示“是否带伞”,带伞时 y = 1 y=1 y=1,否则 y = 0 y=0 y=0。
为了叙述方便,我们这里把0.3、0.7信任度,称为加权。现在我们引入“加权和” a a a。他是输入变量的加权和。
a = 0.3 x 1 + 0.7 x 2 a=0.3x_1 + 0.7x_2 a=0.3x1+0.7x2
x 1 , x 2 x_1,x_2 x1,x2的可能取值总共只有4个,我们不妨把他们列举出来,暂且把表格称为真值表吧:(此处,我们认为,只有看到乌云和天气预报同时满足,我们才带伞)
| x 1 x_1 x1 | x 2 x_2 x2 | a a a | y y y |
|---|---|---|---|
| 0 | 0 | 0 | 0 |
| 1 | 0 | 0.3 | 0 |
| 0 | 1 | 0.7 | 0 |
| 1 | 1 | 1 | 1 |
观察表格可以指定如下规则,用于判断:当 a a a大于某值 θ \theta θ,时, y y y取1,也就是带伞。
y = { 0 0.3 x 1 + 0.7 x 2 ≤ θ 1 0.3 x 1 + 0.7 x 2 > θ y= \left\{\begin{matrix} 0\quad 0.3x_1 + 0.7x_2\le \theta \\ 1\quad 0.3x_1 + 0.7x_2> \theta \end{matrix}\right. y={
00.3x1+0.7x2≤θ10.3x1+0.7x2>θ
通过观察真值表,我们可以非常容易得到 θ \theta θ的取值,0.8或是0.9都可以,取值范围如下:
θ > 0.7 \theta>0.7 θ>0.7
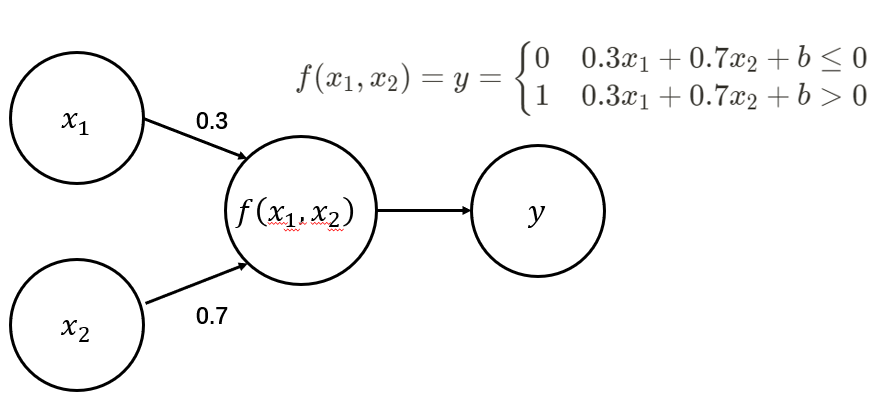
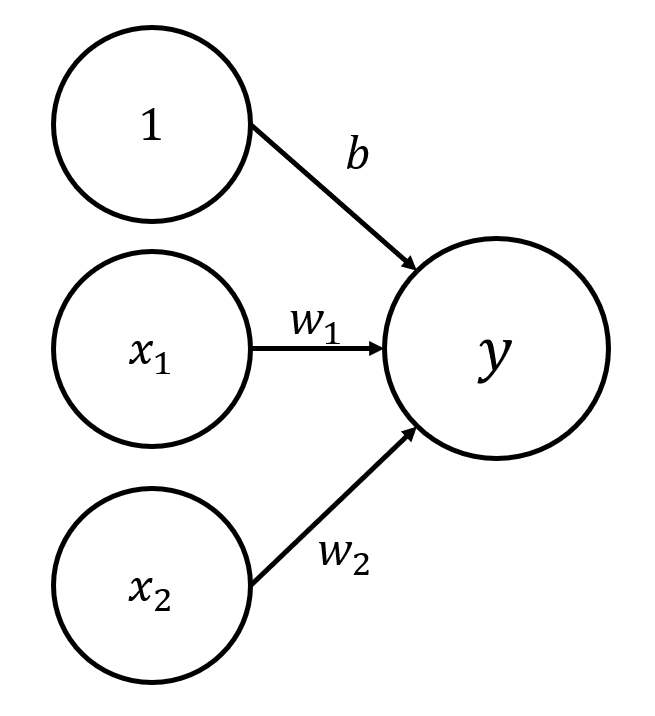
至此现在我们把“判断”成功数学建模,如下:
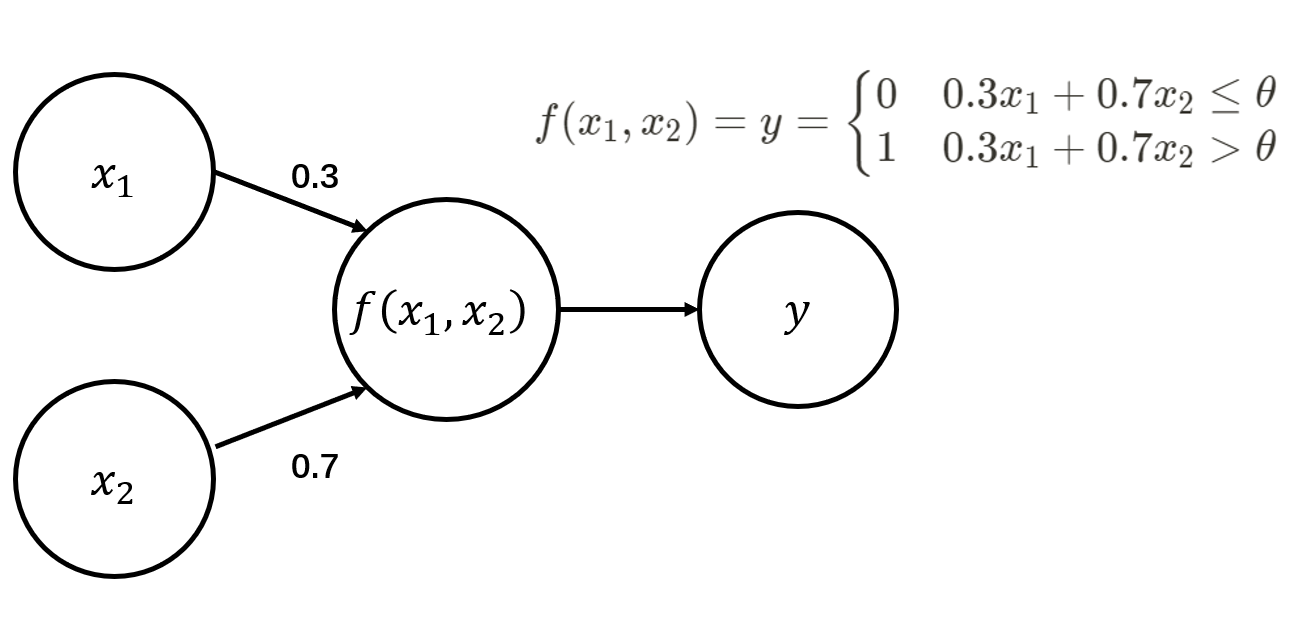
至此,一个完整的,具有实际意义的感知机建造完成,上图中间的圆圈便是感知机,它有两个输入信号,一个输出信号。我把他命名为“宝宝感知机”。
青年版
宝宝感知机的成长
宝宝感知机的判断逻辑是:
y = { 0 0.3 x 1 + 0.7 x 2 ≤ θ 1 0.3 x 1 + 0.7 x 2 > θ y= \left\{\begin{matrix} 0\quad 0.3x_1 + 0.7x_2\le \theta \\ 1\quad 0.3x_1 + 0.7x_2> \theta \end{matrix}\right. y={
00.3x1+0.7x2≤θ10.3x1+0.7x2>θ
现在我们对它简单变换下:
y = { 0 0.3 x 1 + 0.7 x 2 + ( − θ ) ≤ 0 1 0.3 x 1 + 0.7 x 2 + ( − θ ) > 0 y= \left\{\begin{matrix} 0\quad 0.3x_1 + 0.7x_2+(-\theta)\le0 \\ 1\quad 0.3x_1 + 0.7x_2+(-\theta)> 0 \end{matrix}\right. y={
00.3x1+0.7x2+(−θ)≤010.3x1+0.7x2+(−θ)>0
我们令 b = ( − θ ) b=(-\theta) b=(−θ),公式可以进一步化简:
y = { 0 0.3 x 1 + 0.7 x 2 + b ≤ 0 1 0.3 x 1 + 0.7 x 2 + b > 0 y= \left\{\begin{matrix} 0\quad 0.3x_1 + 0.7x_2+b\le0 \\ 1\quad 0.3x_1 + 0.7x_2+b> 0 \end{matrix}\right. y={
00.3x1+0.7x2+b≤010.3x1+0.7x2+b>0
紧接着,感知机示意图如下:
还记得我们在引入宝宝感知机的时候,引入的加权和变量 a a a嘛,
a = 0.3 x 1 + 0.7 x 2 a=0.3x_1 + 0.7x_2 a=0.3x1+0.7x2
此时,我们不如再次借助它的概念来清晰化感知机的概念,我们令a新的表达如下:
a = 0.3 x 1 + 0.7 x 2 + b a=0.3x_1 + 0.7x_2+b a=0.3x1+0.7x2+b
则逻辑判断表述可以简化为:
h ( a ) = y = { 0 a ≤ 0 1 a > 0 h(a)=y= \left\{\begin{matrix} 0\quad a\le0 \\ 1\quad a> 0 \end{matrix}\right. h(a)=y={
0a≤01a>0
此处我们用符号 h h h代替 f f f,仅仅是符号的改变,不改变含义。
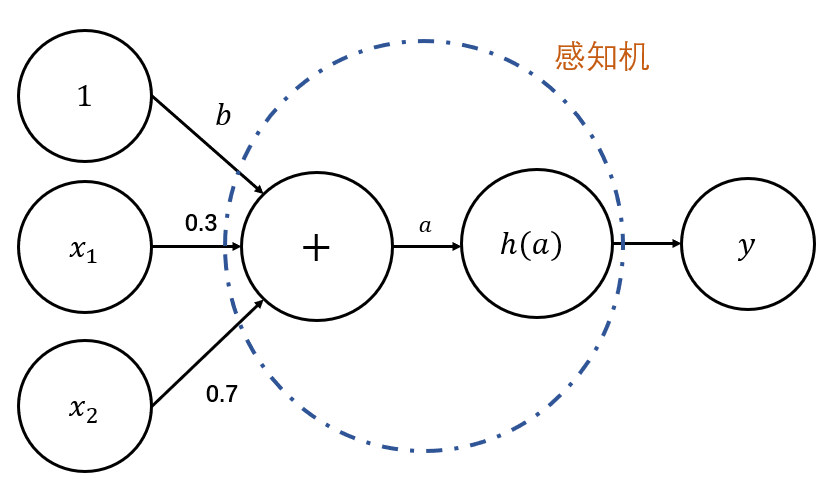
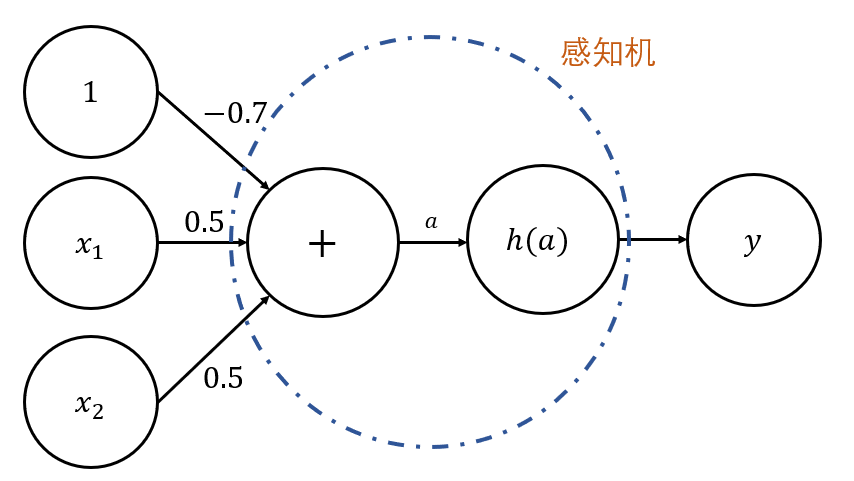
画出简化后的感知机示意图会让概念更清晰:
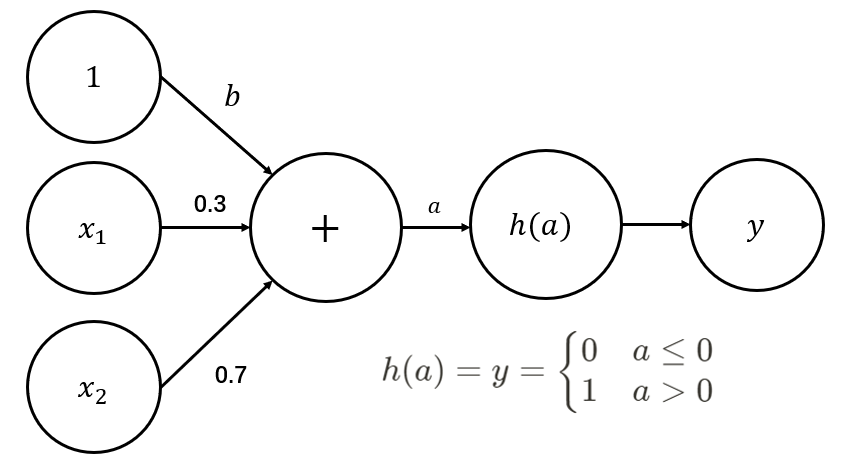
至此,一个完整的,具有实际意义的感知机建造完成,上图中求和与 h ( a ) h(a) h(a)一起构成感知机,它有三个输入信号,一个输出信号。我把他命名为“青年感知机”。
老夫聊发少年狂版
要开始抽象介绍概念喽。
在深度学习领域,我们对上面提到的“信任度”、输入信号、输出信号等等都有专用的名词,现在我们来介绍下。首先把先前讨论的“信任度”0.3和0.7表示为: w 1 , w 2 w_1,w_2 w1,w2。
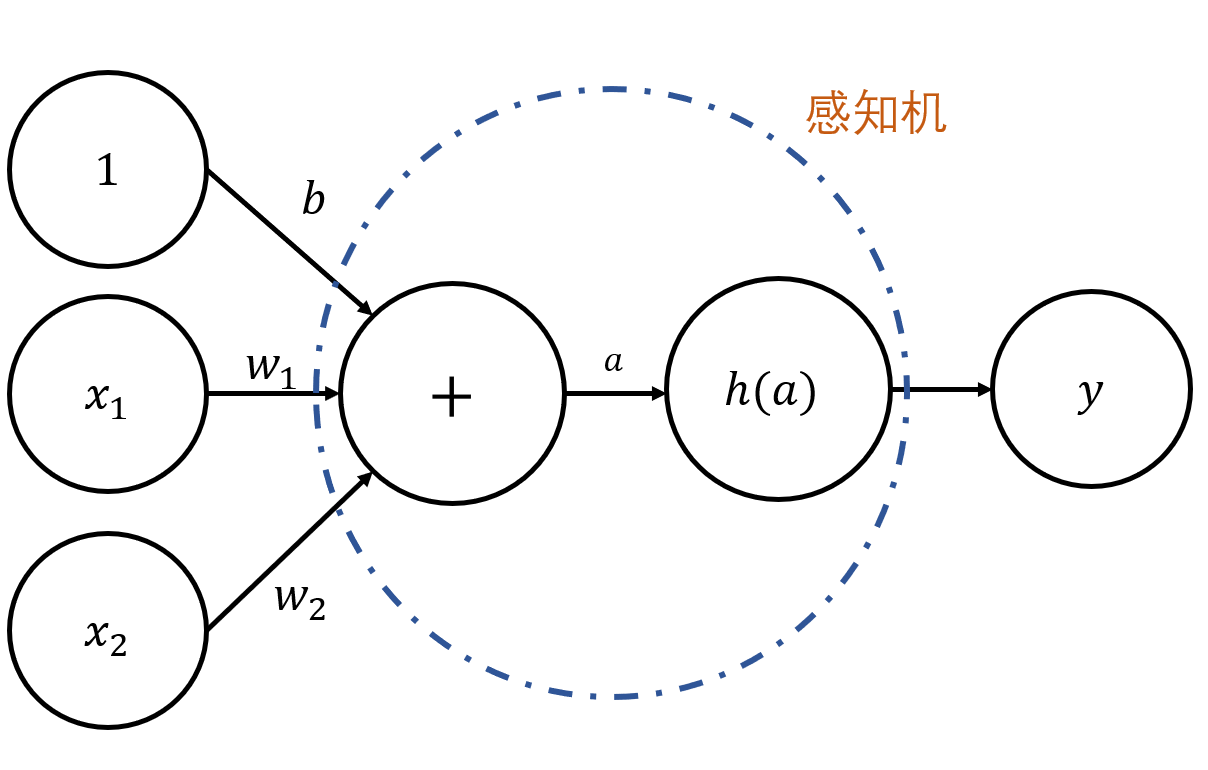
总结一下上述的讨论:
h ( a ) = { 0 a ≤ 0 1 a > 0 h(a)= \left\{\begin{matrix} 0\quad a\le0 \\ 1\quad a> 0 \end{matrix}\right. h(a)={
0a≤01a>0
a = w 1 x 1 + w 2 x 2 + b a=w_1x_1 + w_2x_2+b a=w1x1+w2x2+b
| 变量 | 名称 | |
|---|---|---|
| w w w | 权重 | 权重越高,信号在判断中的作用越大 |
| b b b | 偏置 | 依据判断结果进行调整 |
| h ( a ) h(a) h(a) | 激活函数 | 有多种选择,此处举例使用的是阶跃函数 |
至此完整的感知机便呈现在大家眼前,概念和专业名称均已阐明。
一般时候,我们把感知机表示成如下形式:
激活函数
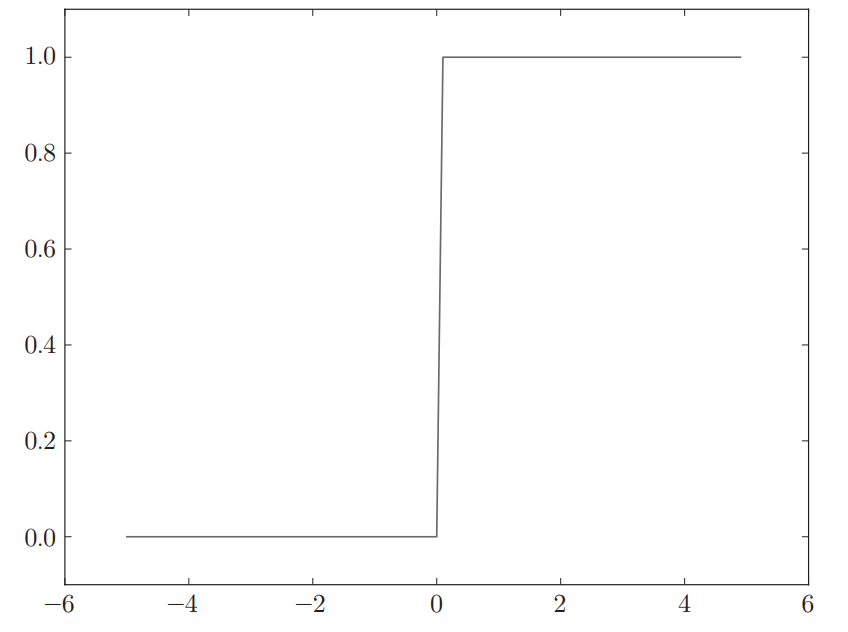
激活函数可以有多种选择,上述我们举例使用的是阶跃函数,表达式如下:
h ( a ) = { 0 a ≤ 0 1 a > 0 h(a)= \left\{\begin{matrix} 0\quad a\le0 \\ 1\quad a> 0 \end{matrix}\right. h(a)={
0a≤01a>0
此外还有sigmoid、ReLu可供选择。以sigmoid为例,表达式为:
h ( x ) = 1 1 + exp ( − x ) h(x)=\frac{1}{1+\operatorname{exp}(-x)} h(x)=1+exp(−x)1
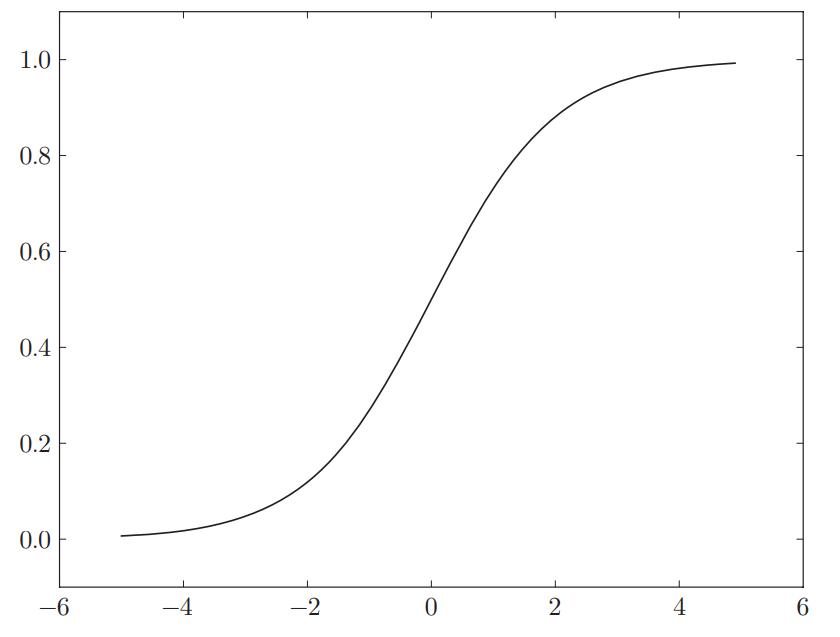
刚刚入门深度学习,可以先不去细究为什么要引入不同的激活函数,sigmoid函数作用是什么,怎么长得那么奇怪,相对于阶跃函数的优势在哪,在后面的学习中会体会到激活函数的作用。只需要知道,此处激活函数有多种选择就可以。
感知机的应用
与门
真值表如下:
| x 1 x_1 x1 | x 2 x_2 x2 | y y y |
|---|---|---|
| 0 | 0 | 0 |
| 1 | 0 | 0 |
| 0 | 1 | 0 |
| 1 | 1 | 1 |
我们现在对着感知机的图,确认取值。

权重值和偏置 w 1 , w 2 , b w_1,w_2,b w1,w2,b有多种取值方式,比如分别取:0.5,0.5,-0.7.
| x 1 x_1 x1 | x 2 x_2 x2 | a a a | y y y |
|---|---|---|---|
| 0 | 0 | 0 | 0 |
| 1 | 0 | -0.2 | 0 |
| 0 | 1 | -0.2 | 0 |
| 1 | 1 | 0.3 | 1 |
也可以分别取:1,1,-1.3.
| x 1 x_1 x1 | x 2 x_2 x2 | a a a | y y y |
|---|---|---|---|
| 0 | 0 | 0 | 0 |
| 1 | 0 | -0.3 | 0 |
| 0 | 1 | -0.3 | 0 |
| 1 | 1 | 0.7 | 1 |
或门
真值表如下:
| x 1 x_1 x1 | x 2 x_2 x2 | y y y |
|---|---|---|
| 0 | 0 | 0 |
| 1 | 0 | 1 |
| 0 | 1 | 1 |
| 1 | 1 | 1 |
权重值和偏置 w 1 , w 2 , b w_1,w_2,b w1,w2,b有多种取值方式,比如分别取:0.5,0.5,-0.2.
| x 1 x_1 x1 | x 2 x_2 x2 | a a a | y y y |
|---|---|---|---|
| 0 | 0 | 0 | 0 |
| 1 | 0 | 0.3 | 1 |
| 0 | 1 | 0.3 | 1 |
| 1 | 1 | 0.7 | 1 |
感知机与深度学习
感知机与神经网络
单一感知机只能实现简单的功能,但是数以万计、数以亿计的感知机配合起来,可以处理的问题就不那么简单喽。我们把感知机组成的整体,称为“神经网络”
感知机和深度学习什么关系呢?
以感知机的应用部分的“与门”为例,我们根据与门的真值表,人工给他确定了权重和偏置,让感知机实现了与门的功能。可是数以万计的感知机组成的网络,会有难以计数的权重和偏置,这个时候人工确认它们的取值不再现实。深度学习算法便可以解决这个问题,深度学习会根据真值表,学习出一个可能的权重和偏置,来实现与门的功能,不再需要人来确认参数。