问题描述:
在进行图像分割时,由于分割效果不够理想,使得两相邻区域间存在未分割的情况。如果使用合并boundingBox的方式来处理,势必又会引入更多无关的区域,从而增加了分割的难度。因此本文考虑对两区域进行连接并寻找连接后的凸包,从而实现相邻区域合并,以便于后续处理。
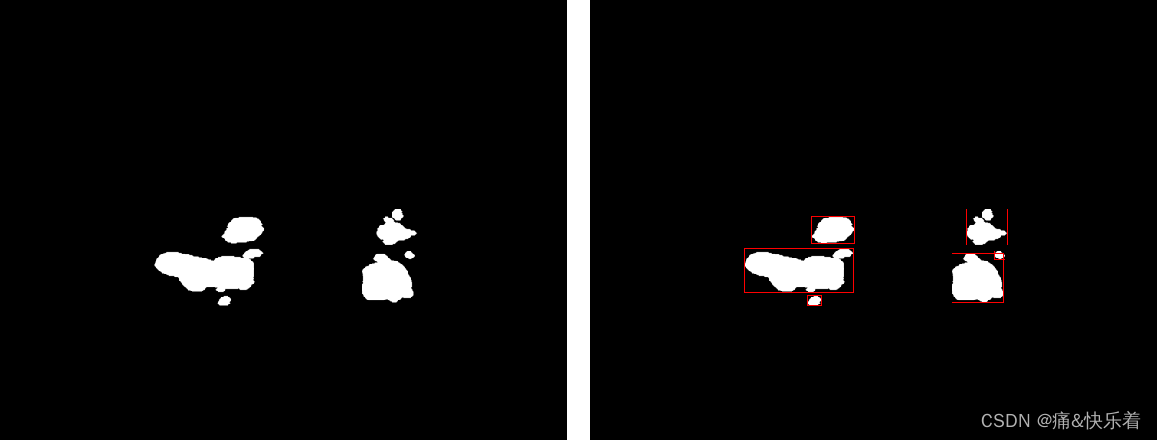
图1 原始图像以及其boundingBox
算法思路:
提取轮廓->计算轮廓间的距离->连接小于阈值T的两个轮廓->寻找凸包并进行填充
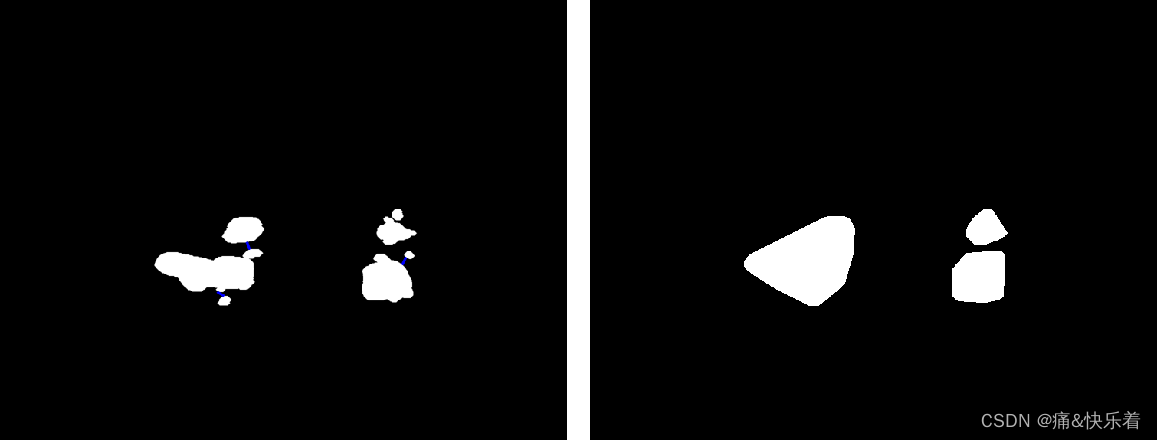
图2 连接相邻区域(蓝线)和相应的凸包
由图2显而易见,该方法相比与合并boundingBox的方式减小无关的区域。
完整实现代码如下:
vector<Point> GetPoint(vector<Point> contour)
{
cv::Rect rect = cv::boundingRect(cv::Mat(contour));
Point up, down, left, right;
up.x = rect.x + rect.width / 2;
up.y = rect.y;
vector<Point> p1;
p1.push_back(up);
down.x = rect.x + rect.width / 2;
down.y = rect.y + rect.height;
p1.push_back(down);
left.x = rect.x;
left.y = rect.y + rect.height / 2;
p1.push_back(left);
right.x = rect.x + rect.width;
right.y = rect.y + rect.height / 2;
p1.push_back(right);
return p1;
}
void ConnectNearRegion()
{
Mat src = imread("D:\\PyProject01\\images\\metal.png");
Mat gray, imageBw;
cvtColor(src, gray, CV_BGR2GRAY);
threshold(gray, imageBw, 0, 255, CV_THRESH_BINARY);
//腐蚀
/*cv::Mat element = cv::getStructuringElement(MORPH_RECT, Size(3, 3));
Mat metalMask;
cv::erode(imageBw, metalMask, element);*/
vector<vector<Point>> boundingPoints;
vector<vector<Point>> contours;
vector<Vec4i> hierarchy;
findContours(imageBw, contours, hierarchy, CV_RETR_EXTERNAL, CHAIN_APPROX_SIMPLE, Point());
//每个轮廓都只提取四个点
for (int i = 0; i < contours.size(); ++i)
{
vector<Point> p1 = GetPoint(contours[i]);
boundingPoints.push_back(p1);
}
//计算轮廓间的距离
for (int i = 0; i < contours.size(); ++i)
{
cv::Rect rect = cv::boundingRect(cv::Mat(contours[i]));
//rectangle(imageBw, rect, Scalar(200,0,255), 1);
vector<Point> p1 = contours[i]; // boundingPoints[i];
for (int i1 = i+1; i1 < contours.size(); ++i1)
{
vector<Point> p2 = contours[i1];// boundingPoints[i1];
//分别求p1和p2的四个点距离
float T = 10;
int flag = 0;
for (int i2 = 0; i2 < p1.size(); i2++)
{
for (int i3 = 0; i3 < p2.size(); i3++)
{
float d = sqrt(pow(float(p1[i2].x - p2[i3].x), 2) + pow(float(p1[i2].y - p2[i3].y), 2));
if (d < T)
{
line(imageBw, p1[i2], p2[i3], Scalar(255, 0, 0), 1, LINE_AA, 0);
flag = 1;
break;
}
}
if (flag)
break;
}
}
}
imshow("", imageBw);
waitKey();
//find convex
vector<vector<Point>> contours2;
vector<Vec4i> hierarchy2;
//find image contours
findContours(imageBw, contours2, hierarchy2, RETR_TREE, CHAIN_APPROX_SIMPLE, Point());
vector<vector<Point>>hull2(contours2.size());
//get convex
Mat filling = Mat::zeros(imageBw.size(), CV_8UC1);
for (int i = 0; i < contours2.size(); i++)
{
convexHull(Mat(contours2[i]), hull2[i], false);
fillPoly(filling, hull2[i], Scalar(255));
}
imshow("", filling);
waitKey();
}