在以往的Prometheus 450(P450)无人机上,我们搭载的是Intel Realsense T265定位模块,使用USB连接方式挂载到机载计算机allspark上,通过机载上SDK驱动T265运行并输出SLAM信息,以此来实现室内定位功能。
为进一步提升P450系列无人机室内定位的稳定性与可靠性,同时将定位精度控制在10cm以内,近期我们将进行多种方案研测,本期我们将用P450进阶款(即将推出)无人机搭载VIOBOT模块做进一步研测。
VIOBOT模块
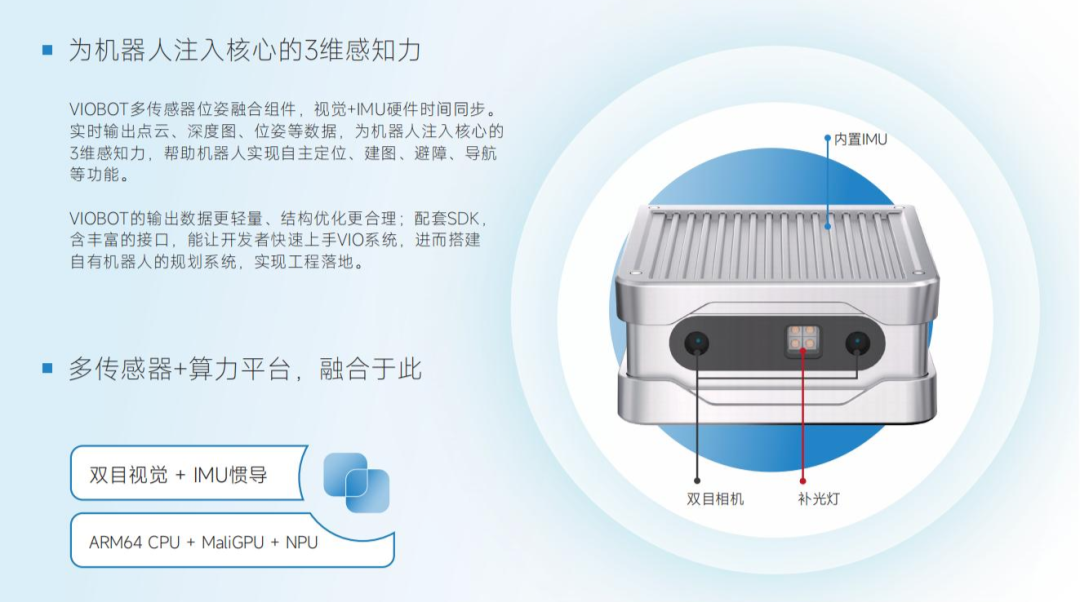
VIOBOT模块是基于双目相机和IMU等多传感器融合的VIO(视觉惯性里程计)组件系统。该组件集多传感器、视觉算法与算力平台于一体,视觉+IMU硬件时间同步,可实时输出点云、深度图、位姿等数据。
其主要优势包括:
(1)系统将传感器/算力平台/算法合一,大大优化了感知规划系统架构;
(2)先进高效的视觉融合算法,实现良好的鲁棒性,兼具高精度感知;
(3)算法与硬件高度协同配合,使系统精简高效;
(4)MCU时间同步,实现毫秒级的超低时延;
(5)简单易用,无需繁琐的初始化调试,开机即可开始感知。
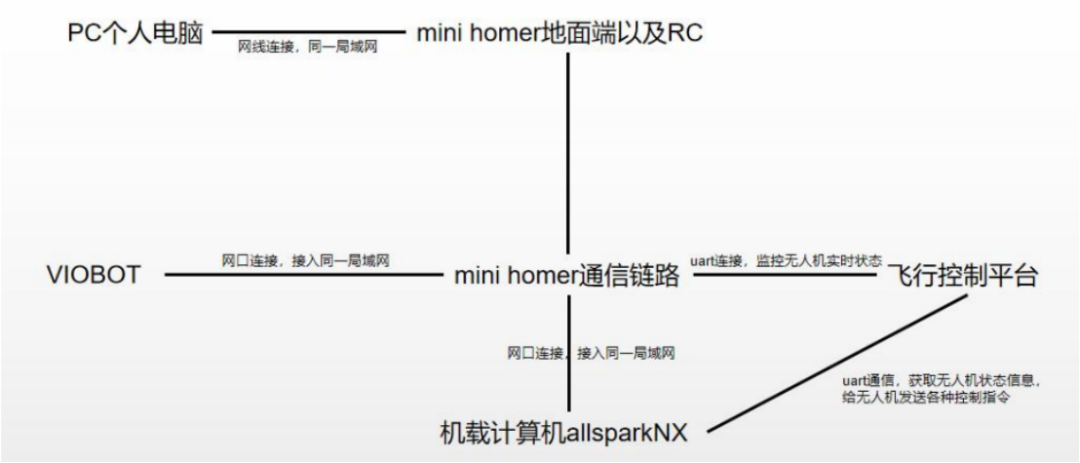
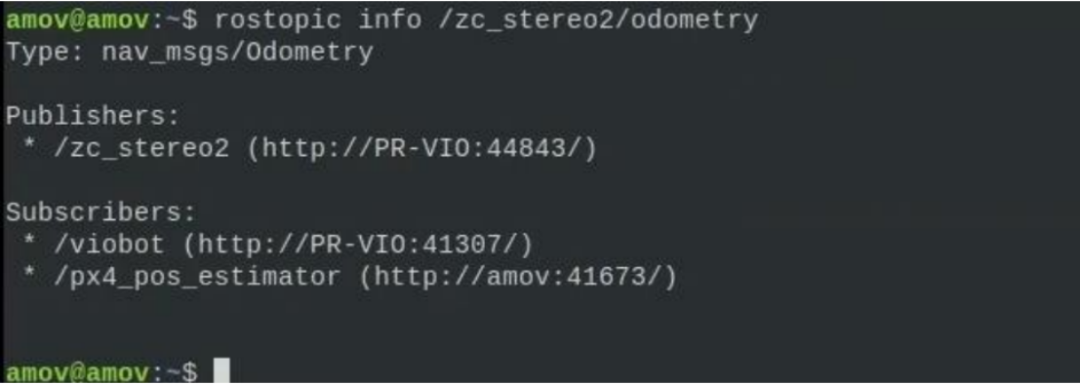
该模块通过网口与无人机进行数据交互,相比于USB接口,网口的稳定性更高,通过Mini Homer可以将VIOBOT与机载计算机进行同一局域网组网。
实验场景分为室内环境和地下停车库环境,接下来跟随阿木,一起来看下测试情况吧!
【P450进阶款开源无人机】室内新SLAM模块,更稳定更高效!
此次试验用到的设备
P450进阶款无人机:基于开源飞控PX4及机器人操作系统ROS打造,搭载不同的机载计算机,支持高低性能边缘计算能力;搭载不同定位设备,支持室内室外多种场景定位;机载计算机内置了开源自主无人机软件平台Prometheus,提供稳定可靠的控制SDK;Prometheus专业版地面站提供方便快捷的交互使用。
Allspark机载计算机:接口丰富、功能强大、预装Prometheus软件系统,支持二次开发。
SLAM模块VIOBOT:基于双目相机和IMU等多传感器融合的位姿VIO(视觉惯性里程计)组件系统。
Mini Homer图数传:小体积、远距离、功耗低、穿墙能力强,支持组网(1对8)和中继。
地面端:Mini Homer地面端及遥控器一体。
笔记本电脑:地面站监测无人机状态以及交互功能。
总体硬件设计

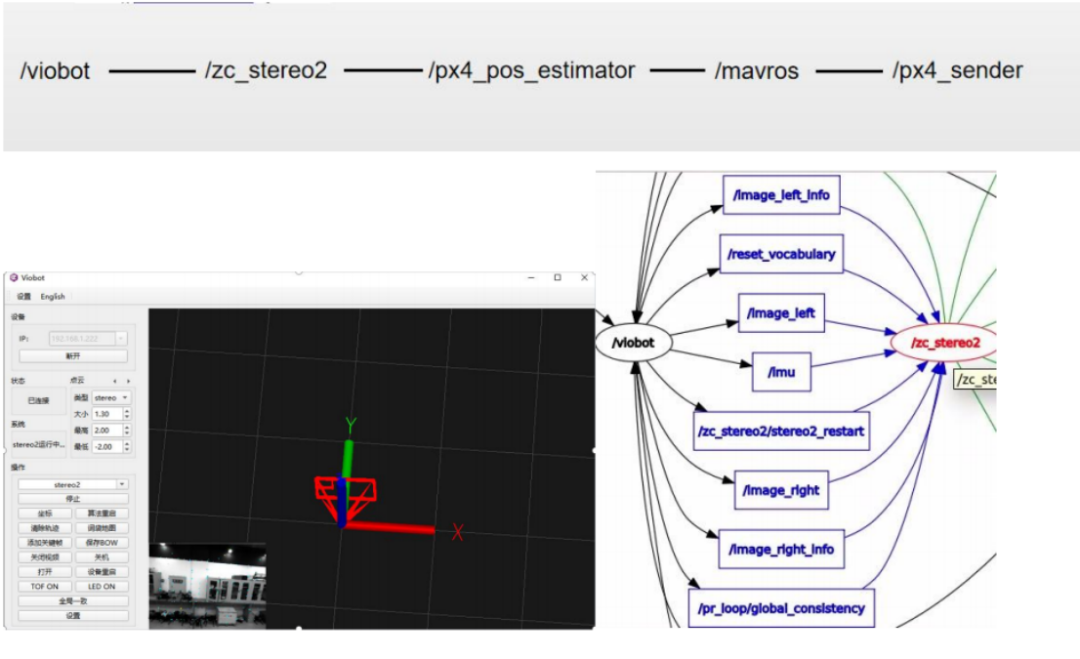
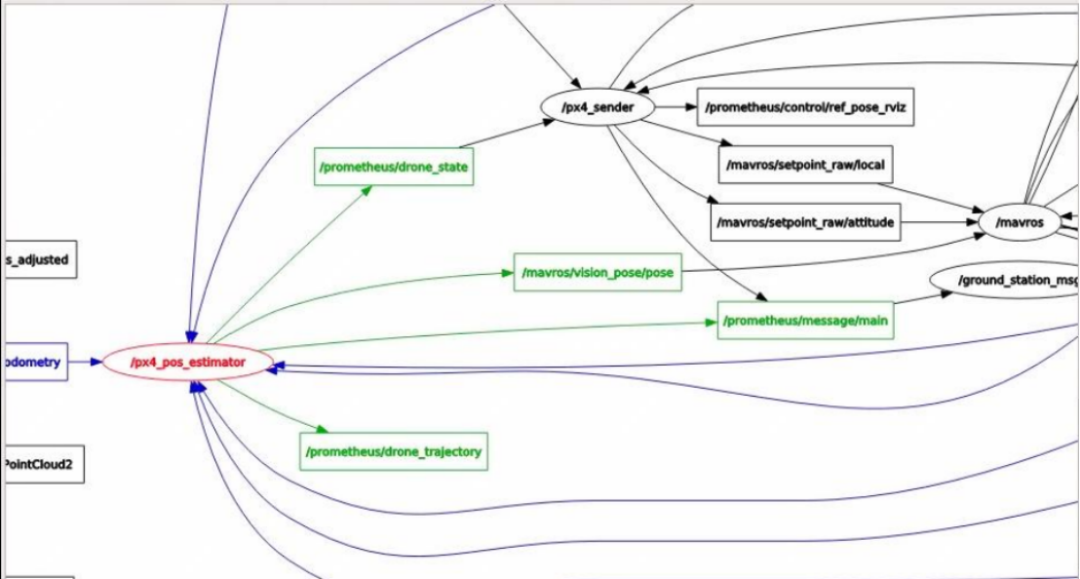
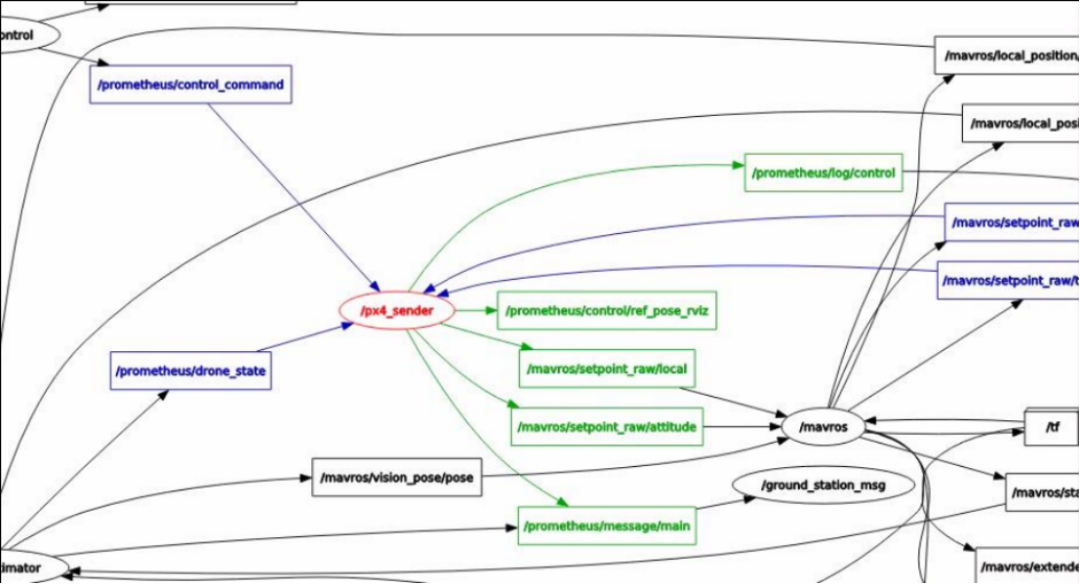
软件设计
实验结果分析
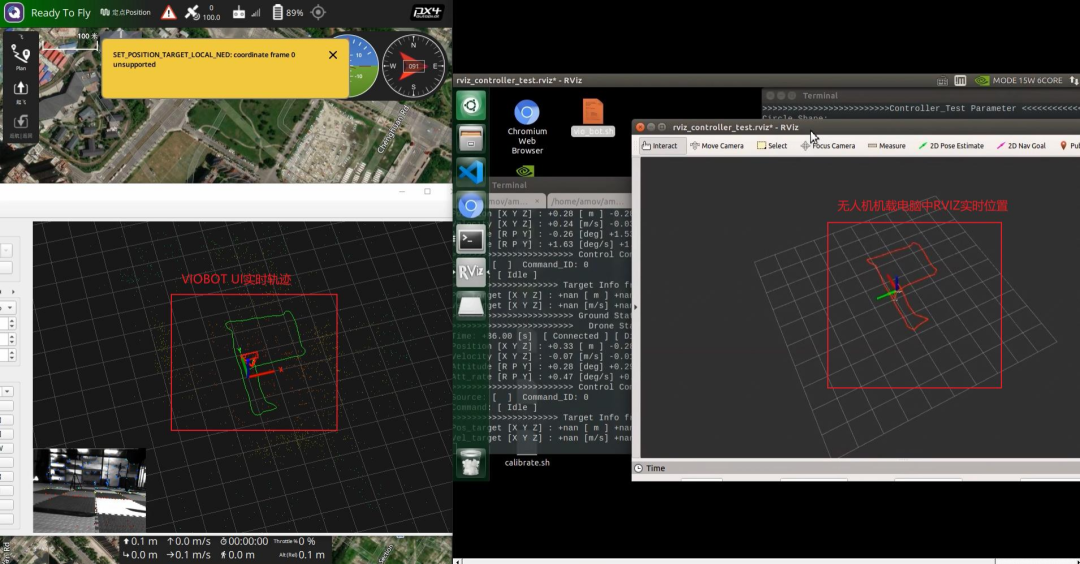
1、VIOBOT与飞行轨迹对比
轨迹基本重合,并且位置实时刷新频率也相对正常。
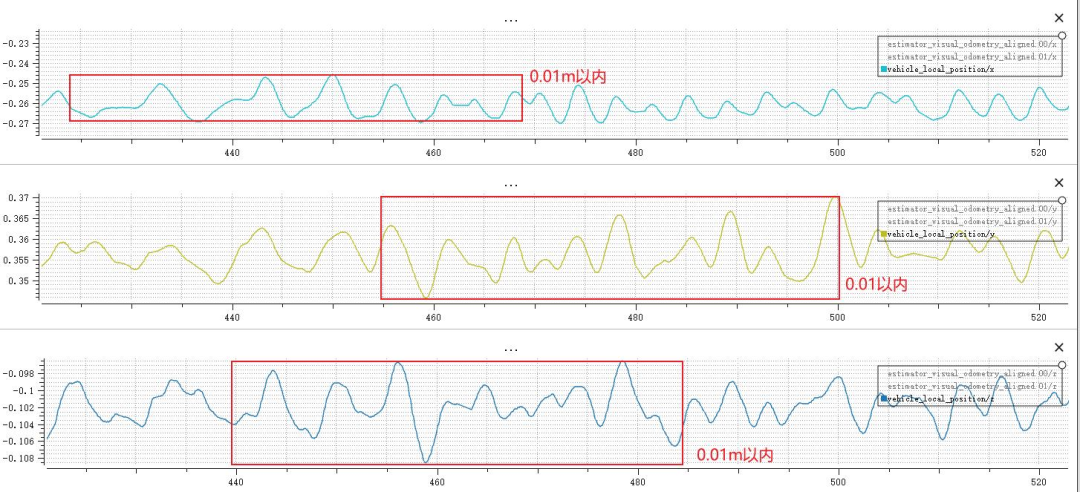
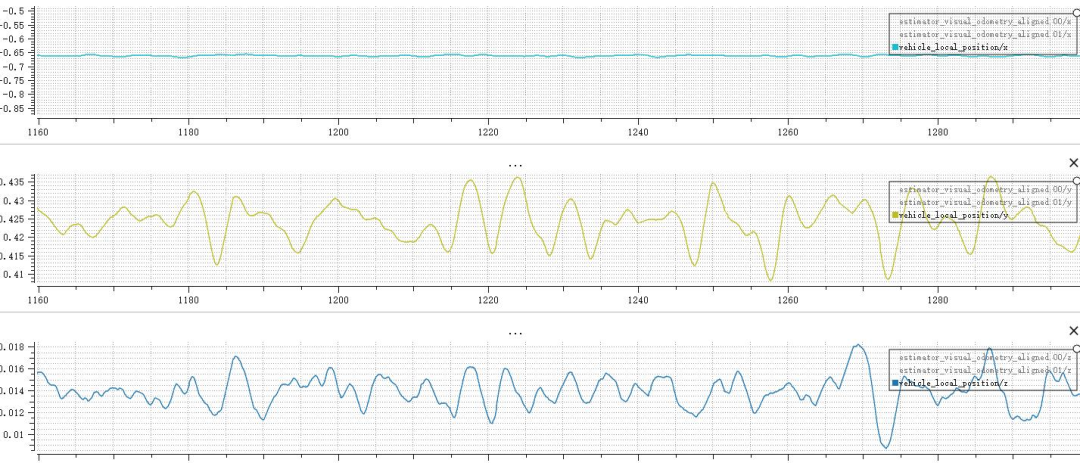
2、悬停精度分析
下图是根据飞机飞行日志得到悬停的精度,从视频来看,悬停精度也相对不错。
总体来看,VIOBOT模组用在P450进阶款无人机上的表现还是不错的,达到了我们的预期。以往我们在P230无人机上已经做过 VINS-fusion的工程实现,Prometheus机载代码的复用性强,因此再切换到VIOBOT作为SLAM输入很方便,实际飞行效果也很稳定。后面我们也会多多使用VIOBOT在无人机上的应用,期待下次测评!
对于本期内容若大家有疑问,欢迎在文末评论区给我们留言~也鼓励大家积极讨论,与阿木一起探讨更多的实验挑战!