本机软硬件环境
- ROS2-foxy
- ubuntu20.04
- 速腾RS16
ROS2驱动下载
mkdir laser_ws && cd laser_ws/
mkdir src && cd src/
git clone https://github.com/RoboSense-LiDAR/rslidar_msg.git
git clone https://github.com/RoboSense-LiDAR/rslidar_sdk.git
cd rslidar_sdk
git submodule init
git submodule update
ROS2编译
1、在文件CMakeLists.txt之上,将变量COMPILE_METHOD设置为COLCON。
set(COMPILE_METHOD COLCON)
2、将文件package_ros2.xml的内容复制到package.xml中。
3、回到工作空间根目录,运行以下命令进行编译运行。先编译 rslidar_msg,编译之后可能需要source install/setup.bash再编译rslidar_sdk。
colcon build --packages-select rslidar_msg
colcon build --packages-select rslidar_sdk
设置固定IP
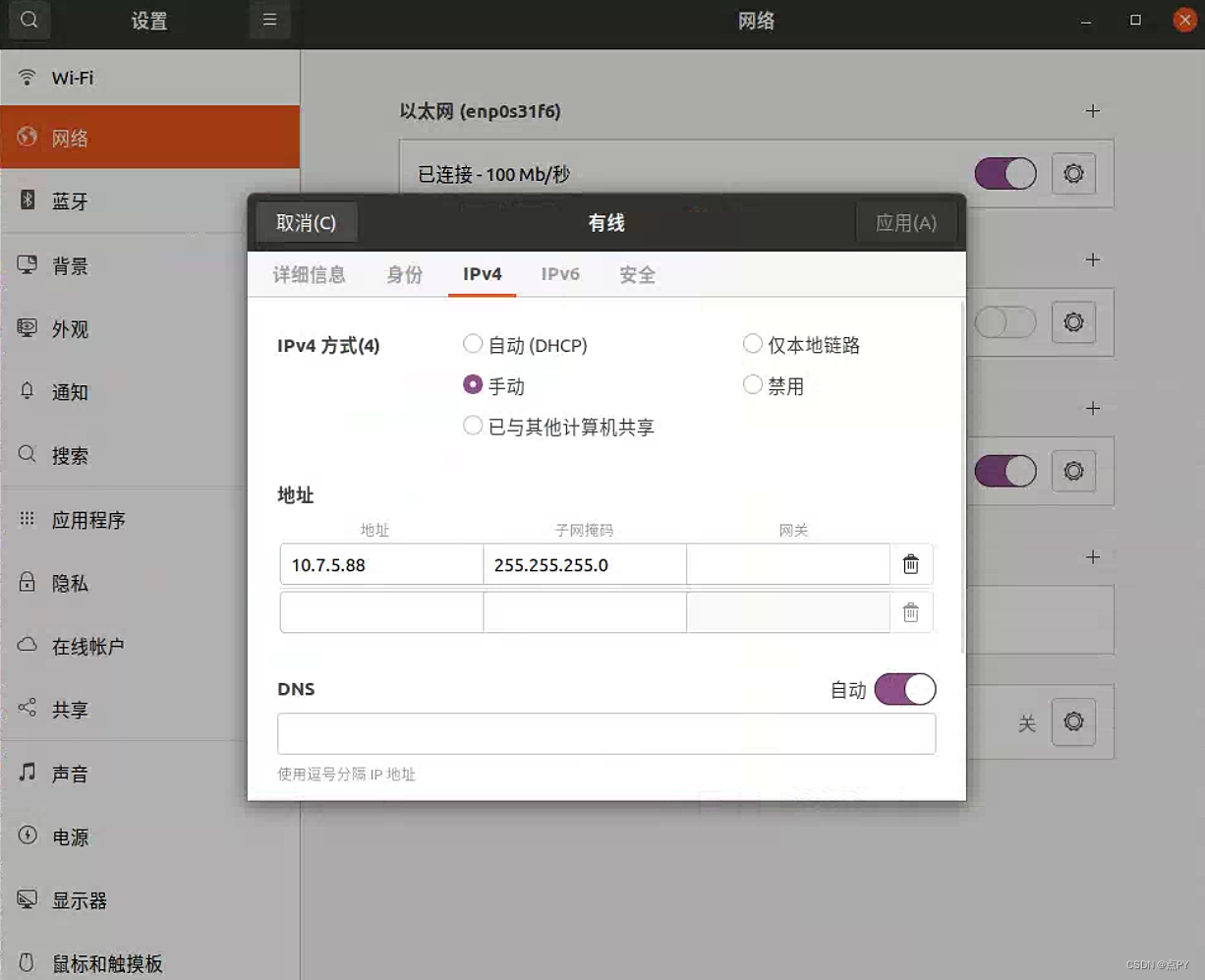
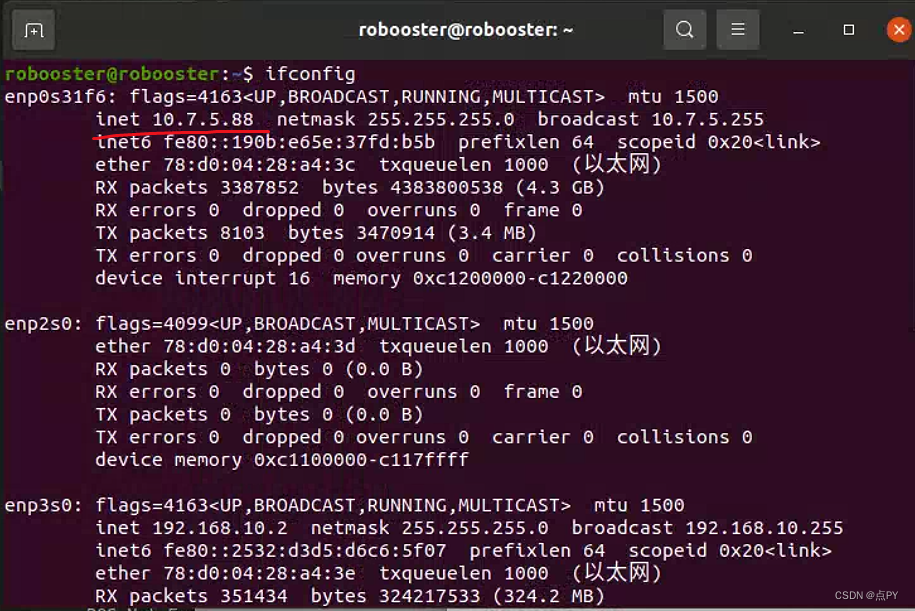
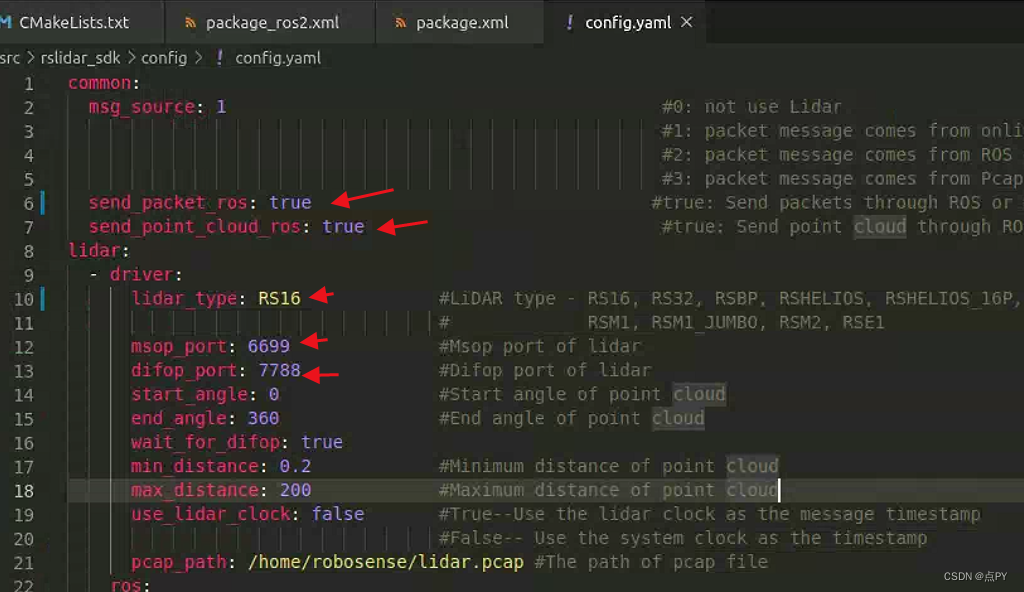
编辑配置文件
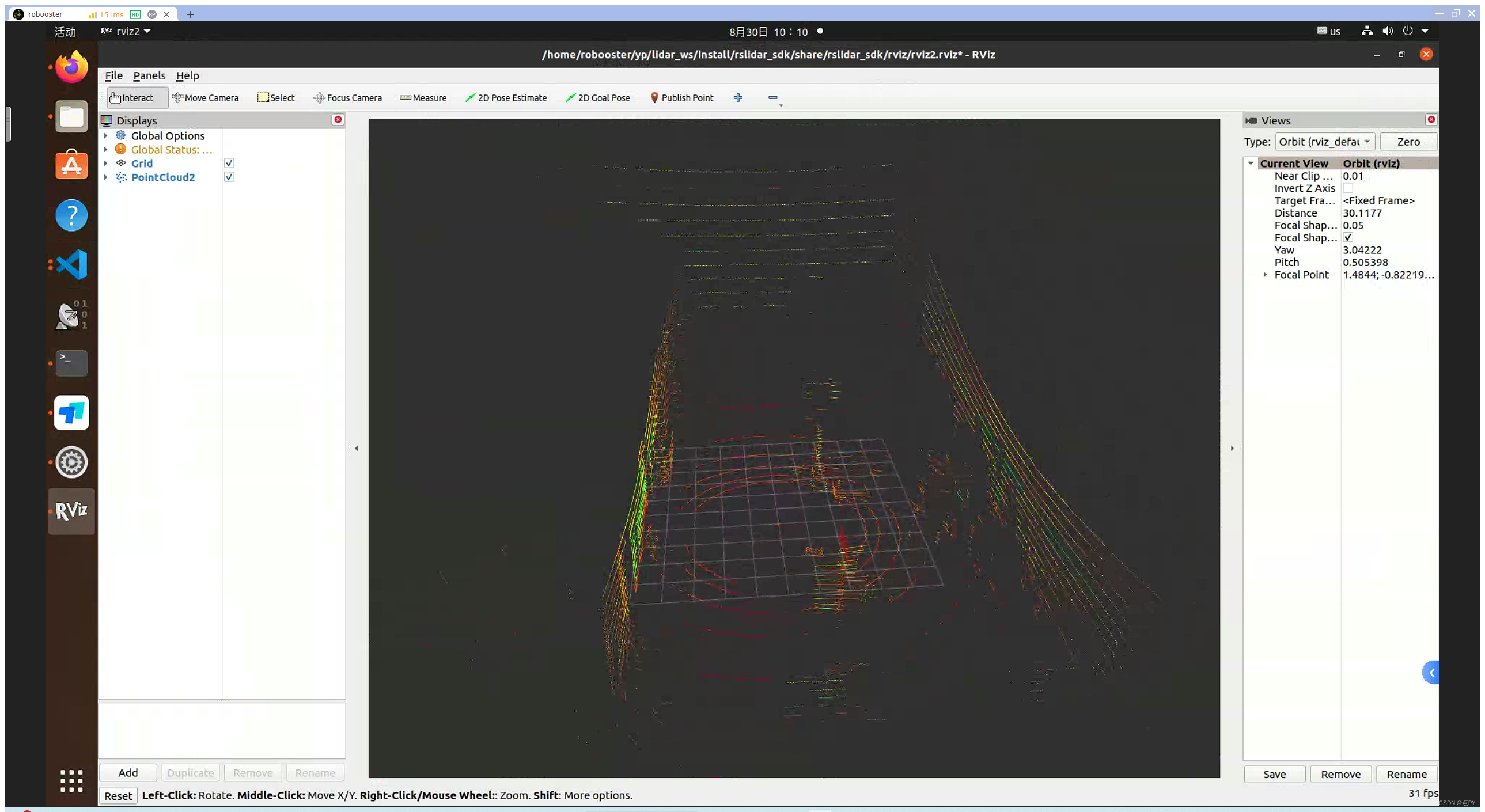
测试
source install/setup.bash
ros2 launch rslidar_sdk start.py
参考
https://blog.csdn.net/weixin_56641176/article/details/131022156?ops_request_misc=&request_id=&biz_id=102&utm_term=rslidar_sdk%20ros2&utm_medium=distribute.pc_search_result.none-task-blog-2blogsobaiduweb~default-1-131022156.268v1koosearch&spm=1018.2226.3001.4450
https://github.com/RoboSense-LiDAR/rslidar_sdk/blob/main/doc/howto/06_how_to_decode_online_lidar_CN.md