1. 功能说明
智能垃圾桶是一种利用物联网技术和智能感知能力的智能设备,旨在提高垃圾分类和处理的效率。通常具备以下特点和功能:
① 智能感知:智能垃圾桶配备各种传感器,如压力传感器、红外线传感器等,可以实时感知垃圾桶内垃圾的填充情况和类型。
② 垃圾分类:基于传感器的数据,智能垃圾桶能够自动进行垃圾分类,识别可回收物、湿垃圾、干垃圾等不同种类的垃圾,并对其进行分别存放。
③ 容量监测:智能垃圾桶可以实时监测垃圾桶的容量,当垃圾桶接近满载时,会发送提醒信号,方便及时清理和处理垃圾。
④ 数据统计与管理:智能垃圾桶能够记录并统计不同类型垃圾的数量和填充情况,为垃圾处理部门提供数据支持,优化垃圾收集和处理的计划和资源分配。
⑤ 远程监控和控制:智能垃圾桶可以与中心管理系统连接,通过网络实现远程监控和控制,方便管理人员进行实时的状态监测和操作控制。
⑥ 提升垃圾分类意识:智能垃圾桶可以通过显示屏、语音提示等方式,向用户提供垃圾分类的指引和宣传,帮助提高公众的垃圾分类意识和行为。
本文实例将实现在智能垃圾桶上安装一个 近红外传感器 ,当近红外传感器触发后,垃圾桶即开盖的功能。

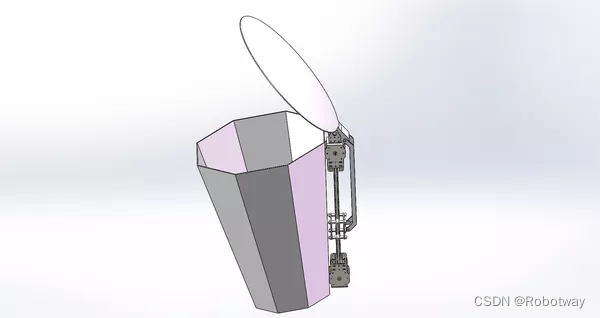
2. 结构说明
R318样机智能垃圾桶的结构主要采用皮带滑轨与四连杆的组合,来实现垃圾桶盖子的开合。具体结构如下:
① 皮带滑轨:智能垃圾桶的顶部设有一个皮带滑轨,是一条闭合的环形轨道,皮带滑轨上方安装有垃圾桶盖子。

② 电机与传动系统:在皮带滑轨的一侧,安装有一个步进电机和传动系统,电机通过传动系统与皮带滑轨相连,提供动力驱动滑轨运动。
③ 四连杆:在滑轨上还安装有四连杆机构,四连杆通过铰链连接在一起。
④ 控制系统:智能垃圾桶还配备有一个控制系统,可以接收来自近红外传感器的信号,并根据信号控制电机和传动系统,实现垃圾桶盖子的开合。
当近红外传感器检测到有人或垃圾靠近垃圾桶时,控制系统会发送信号给电机和传动系统;电机驱动传动系统带动皮带滑轨运动,同时四连杆也随之运动;通过四连杆机构的连动,垃圾桶盖子可以平稳地打开或关闭,使垃圾桶内部对外开放或密封。
这种基于皮带滑轨和四连杆的结构设计可以确保垃圾桶盖子的平稳、可靠的开合,提高智能垃圾桶的使用便利性和耐用性。
3. 电子硬件
在这个示例中,我们采用了以下硬件,请大家参考:
| 主控板 | Basra主控板(兼容Arduino Uno) |
| 扩展板 | Bigfish2.1扩展板 |
| SH-ST步进电机扩展板 | |
| 传感器 | 近红外传感器 |
| 电池 | 7.4V锂电池 |
| 其它 | 步进电机、自备垃圾桶 |
电路连接:① 将近红外传感器连接在Bigfish扩展板的A0端口;
② 将步进电机连在SH-ST步进电机扩展板的X接口。
4. 功能实现
编程环境:Arduino 1.8.19
下面提供一个当近红外传感器触发后垃圾桶即开盖的参考例程(example.ino),实验效果可参考演示视频。
/*------------------------------------------------------------------------------------
版权说明:Copyright 2023 Robottime(Beijing) Technology Co., Ltd. All Rights Reserved.
Distributed under MIT license.See file LICENSE for detail or copy at
https://opensource.org/licenses/MIT
by 机器谱 2023-07-06 https://www.robotway.com/
------------------------------*/
/*
实验现象:
近红外触发后垃圾桶开盖
实验接线:
* 近红外接A0,步进电机接扩展板X:
*
*/
#define V_MAX 3500 //设置步进电机速度
int sensor0 = A0; //近红外
void setup() {
Serial.begin(9600);//设置波特率
pinMode(sensor0, INPUT);
initMotor(); //初始化步进电机
}
void loop() {
if(!digitalRead( sensor0 ))
{
move(0.9);
delay(3000);
move(-0.9);
}
else
{
delay(10);
}
}程序源代码及样机3D文件资料详见 智能垃圾桶