本教程基于韦东山百问网出的 DShanMCU-RA6M5开发板 进行编写,需要的同学可以在这里获取: https://item.taobao.com/item.htm?id=728461040949
配套资料获取:https://renesas-docs.100ask.net
瑞萨MCU零基础入门系列教程汇总: https://blog.csdn.net/qq_35181236/article/details/132779862
第35章 ADXL345三轴传感器驱动实验
35.1 ADXL345三轴传感器简介
35.1.1 产品概述
ADXL345是一款小而薄的超低功耗3轴加速度计,分辨率高(13位),测量范围达±16g。数字输出数据为16位二进制补码格式,可通过SPI(3线或4线)或I2C数字接口访问。
该器件提供多种特殊检测功能。活动和非活动检测功能:通过比较任意轴上的加速度与用户设置的阈值来检测有无运动发生。敲击检测功能:可以检测任意方向的单振和双振动作。自由落体检测功能:可以检测器件是否正在掉落。这些功能可以独立映射到两个中断输出引脚中的一个。
35.1.2 串行SPI通信
对于SPI,可3线或4线配置,如以下连接图所示:

本书配套开发板使用的是4线SPI,对应的通信时序如下图所示:

从时序图中可知,ADXL345的地址只有6bit[A5:A0],地址字节的最高位为读写控制位,此位为1表示对某个地址写数据;此位为0表示读取某个地址的数据。
35.1.3 寄存器映射表
ADXL345的可访问寄存器多大31个,为了节省篇幅,本书就不在此处一一列举。请读者自行查阅本书配套的资料包中关于ADXL345的手册,里面对其寄存器进行了详细的说明描述。
35.1.4 ADXL345的中断
ADXL345提供两个中断输出引脚:INT1和INT2。这两个中断引脚都是推挽低阻抗引脚。中断引脚默认配置为高电平有效。设置DATA_FORMAT寄存器(地址0x31)中的INT_INVERT位,可以更改为低电平有效。
35.1.5 ADXL345的敲击检测
加速度值超过THRESH_TAP寄存器(地址0x1D)值,并且持续时间小于DUR寄存器(地址0x21)规定的时间范围的时候,SINGLE_TAP中断置位。
两次加速度事件超过THRESH_TAP寄存器(地址0x1D)值,并且持续时间小于DUR寄存器(地址0x21)的规定时间范围的时候,DOUBLE_TAP中断置位。第二次敲击开始于Latent寄存器(地址0x22)规定的时间之后,但在Window寄存器(0x23)规定时间内。详情见手册敲击检测部分。
35.1.6 ADXL345的活动检测
加速度值大于THRESH_ACT寄存器(地址0x24)存储值时,Activity(活动)中断置位,由任一轴参与,通过ACT_INACT_CTL寄存器(0x27)置位。
加速度值小于THRESH_INACT寄存器(地址0x25)的存储值时,Inactivity(静止)位置位,所有轴参与,多于TIME_INACT寄存器(地址0x26)规定的时间,通过ACT_INACT_CTL寄存器(地址0x27)置位。TIME_INACT最大值为255秒。
35.1.7 ADXL345的自由落体检测
加速度值小于THRESH_FF寄存器(地址0x28)的存储值时,FREE_FALL置位,大于TIME_FF寄存器(地址0x29)所有轴(逻辑与)所规定的时间。FREE_FALL中断不同于静止中断,因为:所有轴始终参与,并为逻辑“和”的形式,定时器周期小得多(最大值:1.28秒),始终为直流耦合操作模式。
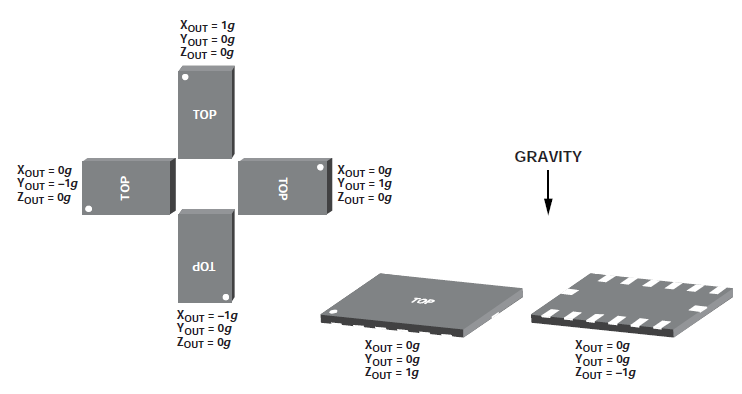
35.2 ADXL345输出响应
ADXL345的输出响应,相对于XYZ方向的关系如下图所示:
35.3 模块配置
35.3.1 GPIO配置
本次实验使用的是开发板配套扩展板的SPI组,如下图所示:

使用的SPI引脚是P202/P203/P204和P205,SPI引脚对应使用的是RA6M5的Common SPI0:

对于P205,将它配置为通用输出即可。
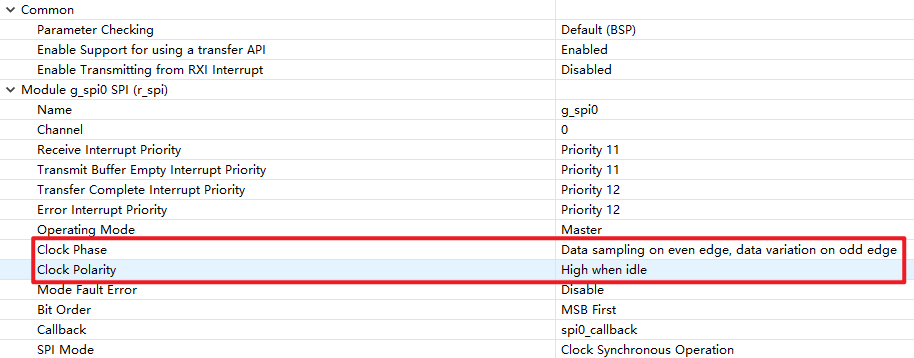
35.3.2 SPI配置
本次实验中,对于SPI的Stack配置不能直接使用默认的参数了,因为ADXL345的手册中明确指明了SPI的SCLK线在空闲时需要处于高电平,而且采样数据是在SPI的上升沿采样,在下降沿有效,而RASC中对于SPI的默认参数刚好相反,需要用户做修改:
另外还需要使能SPI的“发送buffer为空中断”、“接收中断”,并命名中断回调函数。
35.4 外设驱动程序
35.4.1 GPIO驱动
本次实验的SPI片选信号脚P205,会使用软件方式拉低或拉高此引脚来选中SPI设备或放弃SPI设备,因而需要使用GPIO设备对象。
static struct IODev gSPIDACCSDev = {
.name = "ADXL345 CS",
.port = BSP_IO_PORT_02_PIN_05,
.Init = IODrvInit,
.Read = IODrvRead,
.Write = IODrvWrite,
.next = NULL
};
void IODevicesCreate(void)
{
IODeviceInsert(&gSPIDACCSDev);
}
对于GPIO的驱动函数参考《32.4.1 GPIO驱动》。
35.4.2 SPI驱动
对于SPI设备而言,需要的驱动功能无非就是:初始化、读、写和同时读写,因而将这些属性需求封装到一个结构体中,源码如下:
typedef struct SPIDev{
char *name;
unsigned char channel;
int (*Init)(struct SPIDev *ptdev);
int (*Write)(struct SPIDev *ptdev, const unsigned char *buf, unsigned int length);
int (*Read)(struct SPIDev *ptdev, unsigned char *buf, unsigned int length);
int (*WriteRead)(struct SPIDev *ptdev, unsigned char * const wbuf, unsigned char *rbuf, unsigned int length);
struct SPIDev *next;
}SPIDevice;
对于SPI设备对象的管理依然使用链表的方式,实现注册、插入、查找和打印,在dev_spi.c中实现。
- 初始化SPI
对于RA6M5而言,初始化SPI控制器,其实就是调用open函数打开指定SPI即可,本书实验做了一点补充,将片选信号也放到初始化函数中:
static int SPIDrvInit(struct SPIDev *ptdev)
{
if(NULL == ptdev) return -EINVAL;
switch(ptdev->channel)
{
case 0:
{
pCSIO = IODeviceFind("SPIDAC CS");
if(NULL == pCSIO) return -ENXIO;
/* 打开设备 */
fsp_err_t err = g_spi0.p_api->open(g_spi0.p_ctrl, g_spi0.p_cfg);
assert(FSP_SUCCESS == err);
break;
}
case 1:case 2:case 3:case 4:
case 5:
case 6:case 7:case 8:case 9:
break;
default:break;
}
return ESUCCESS;
}
- SPI写数据
Common SPI不同于SCI SPI,SCI SPI只能输出8bit的数据,而Common SPI还能够输出1~32bit的数据,因而用户完全可以根据要写的数据量来动态调整数据位数,以加速传输速度:
static int SPIDrvWrite(struct SPIDev *ptdev, const unsigned char *buf, unsigned int length)
{
if(NULL == ptdev) return -EINVAL;
if(NULL == buf) return -EINVAL;
if(0 == length) return -EINVAL;
switch(ptdev->channel)
{
case 0:
{
pCSIO->Write(pCSIO, 0);
fsp_err_t err = FSP_SUCCESS;
if((length%4)==0)
{
length = length>>2;
err = g_spi0.p_api->write(g_spi0.p_ctrl, buf, length, SPI_BIT_WIDTH_32_BITS);
}
else if((length%2)==0)
{
length = length>>1;
err = g_spi0.p_api->write(g_spi0.p_ctrl, buf, length, SPI_BIT_WIDTH_16_BITS);
}
else if(length==1)
{
err = g_spi0.p_api->write(g_spi0.p_ctrl, buf, length, SPI_BIT_WIDTH_8_BITS);
}
assert(FSP_SUCCESS == err);
SPI0DrvWaitTxCplt();
pCSIO->Write(pCSIO, 1);
break;
}
case 1:case 2:case 3:case 4:
break;
case 5:
case 6:case 7:case 8:case 9:
break;
default:break;
}
return ESUCCESS;
}
需要注意的是SPI传输一次最大能够传输65536个数据,如果传输的数据超过了这个上限,用户需要分包传输。
- SPI读数据
Common SPI读取数据也是一样的道理,可以读取32bit以内的任意位数的数据,一次读取多达数据个数也是65536个:
static int SPIDrvRead(struct SPIDev *ptdev, unsigned char *buf, unsigned int length)
{
if(NULL == ptdev) return -EINVAL;
if(NULL == buf) return -EINVAL;
if(0 == length) return -EINVAL;
switch(ptdev->channel)
{
case 0:
{
pCSIO->Write(pCSIO, 0);
fsp_err_t err = FSP_SUCCESS;
if((length%4)==0)
{
length = length>>2;
err = g_spi0.p_api->read(g_spi0.p_ctrl, buf, length, SPI_BIT_WIDTH_32_BITS);
}
else if((length%2)==0)
{
length = length>>1;
err = g_spi0.p_api->read(g_spi0.p_ctrl, buf, length, SPI_BIT_WIDTH_16_BITS);
}
else if(length==1)
{
err = g_spi0.p_api->read(g_spi0.p_ctrl, buf, length, SPI_BIT_WIDTH_8_BITS);
}
assert(FSP_SUCCESS == err);
SPI0DrvWaitTxCplt();
pCSIO->Write(pCSIO, 1);
break;
}
case 1:case 2:case 3:case 4:
break;
case 5:
case 6:case 7:case 8:case 9:
break;
default:break;
}
return ESUCCESS;
}
- SPI同时读写数据
同时读写也是一个道理:
static int SPIDrvWriteRead(struct SPIDev *ptdev, unsigned char * const wbuf, unsigned char *rbuf, unsigned int length)
{
if(NULL == ptdev) return -EINVAL;
if(NULL == wbuf) return -EINVAL;
if(NULL == rbuf) return -EINVAL;
if(0 == length) return -EINVAL;
switch(ptdev->channel)
{
case 0:
{
pCSIO->Write(pCSIO, 0);
fsp_err_t err = FSP_SUCCESS;
if((length%4)==0)
{
length = length>>2;
err = g_spi0.p_api->writeRead(g_spi0.p_ctrl, wbuf, rbuf, length, SPI_BIT_WIDTH_32_BITS);
}
else if((length%2)==0)
{
length = length>>1;
err = g_spi0.p_api->writeRead(g_spi0.p_ctrl, wbuf, rbuf, length, SPI_BIT_WIDTH_16_BITS);
}
else if(length==1)
{
err = g_spi0.p_api->writeRead(g_spi0.p_ctrl, wbuf, rbuf, length, SPI_BIT_WIDTH_8_BITS);
}
assert(FSP_SUCCESS == err);
SPI0DrvWaitTxCplt();
pCSIO->Write(pCSIO, 1);
break;
}
case 1:case 2:case 3:case 4:
break;
case 5:
case 6:case 7:case 8:case 9:
break;
default:break;
}
return ESUCCESS;
}
- 回调函数和传输完成等待函数
回调函数和传输等待在本书前文对于SPI外设的使用已经讲过,此处仅展示下代码:
static volatile bool gSPI0TxCplt = false;
void spi0_callback(spi_callback_args_t *p_args)
{
switch(p_args->event)
{
case SPI_EVENT_TRANSFER_COMPLETE:
{
gSPI0TxCplt = true;
break;
}
default:break;
}
}
static void SPI0DrvWaitTxCplt(void)
{
while(!gSPI0TxCplt);
gSPI0TxCplt = false;
}
35.5 ADXL345模块
对于ADXL345这个处理器,其官方给出了一个非常完备的参考驱动,参考地址:
https://github.com/analogdevicesinc/no-OS/tree/master/drivers/accel/adxl345
本节是对这个驱动代码的移植使用。
35.5.1 ADXL345设备对象
对于ADXL345,常用操作是读取3轴上的加速度值,在有些时候还会需要手动关闭和开启它的测量;另外,还需要设置ADXL345的测量范围以及精度,因而将这些属性统一封装到一个结构体中(dev_adxl345.h):
typedef struct ADXL345Dev{
char *name;
/** Measurement range */
unsigned char selected_range;
/** Enable/Disable Full Resolution */
unsigned char full_resolution_set;
MeasureValue value;
int (*Init)(struct ADXL345Dev *ptdev);
int (*Read)(struct ADXL345Dev *ptdev);
int (*Start)(struct ADXL345Dev *ptdev);
int (*Stop)(struct ADXL345Dev *ptdev);
}ADXL345Device;
然后在dev_adxl345.c里构造一个ADXL345Device结构体,并给上层代码提高获得这个结构体的函数,代码如下:
static ADXL345Device gADXL345 = {
.name = "ADXL345",
.selected_range = 2,
.full_resolution_set = 0,
.Init = ADXLDevInit,
.Read = ADXLDevRead,
.Start = ADXLDevStart,
.Stop = ADXLDevStop
};
struct ADXL345Dev *ADXL345GetDevice(void)
{
return &gADXL345;
}
35.5.2 寄存器读取函数
对于SPI传输,发送N个字节,就会读到N个字节。要访问ADXL345的寄存器,需要发出2个字节:第1个字节表示寄存器地址(它的最高位为1,表示要读寄存器;为0表示要写寄存器)。
针对寄存器的读写,定义了2个宏:
#define ADXL345_SPI_READ (1 << 7)
#define ADXL345_SPI_WRITE (0 << 7)
读寄存器时,将寄存器的地址跟ADXL345_SPI_READ进行或运算,就得到要发出的第一个字节,要发出的第二个字节可以设为0。SPI传输中发送2个字节,就会读到2个字节,读到的第2个字节就是要得到的数据:
static uint8_t adxl345_get_register_value(uint8_t register_address)
{
if(NULL == pADXLSPI) return 0;
uint8_t data_buffer[2] = {
0, 0};
uint8_t rxbuffer[2] = {
0, 0};
uint8_t register_value = 0;
data_buffer[0] = ADXL345_SPI_READ | register_address;
data_buffer[1] = 0;
if(ESUCCESS != pADXLSPI->WriteRead(pADXLSPI, data_buffer, rxbuffer, 2)) return 0;
register_value = rxbuffer[1];
return register_value;
}
35.5.3 寄存器写函数
写寄存器时,将寄存器的地址跟ADXL345_SPI_WRITE进行或运算,就得到要发出的第一个字节,要发出的第二个字节就是要发出的数值。代码如下:
static void adxl345_set_register_value(uint8_t register_address, uint8_t register_value)
{
if(NULL == pADXLSPI) return;
uint8_t data_buffer[2] = {
0, 0};
uint8_t rxbuffer[2] = {
0, 0};
data_buffer[0] = ADXL345_SPI_WRITE | register_address;
data_buffer[1] = register_value;
pADXLSPI->WriteRead(pADXLSPI, data_buffer, rxbuffer, 2);
}
35.5.4 ADXL345指令定义
ADXL345的指令比较多,详细的请查看本章配套源码,本书此处仅展示部分代码:
/* ADXL345 Register Map */
#define ADXL345_DEVID 0x00 // R Device ID.
#define ADXL345_THRESH_TAP 0x1D // R/W Tap threshold.
#define ADXL345_OFSX 0x1E // R/W X-axis offset.
#define ADXL345_OFSY 0x1F // R/W Y-axis offset.
#define ADXL345_OFSZ 0x20 // R/W Z-axis offset.
#define ADXL345_DUR 0x21 // R/W Tap duration.
#define ADXL345_LATENT 0x22 // R/W Tap latency.
#define ADXL345_WINDOW 0x23 // R/W Tap window.
#define ADXL345_THRESH_ACT 0x24 // R/W Activity threshold.
#define ADXL345_THRESH_INACT 0x25 // R/W Inactivity threshold.
#define ADXL345_TIME_INACT 0x26 // R/W Inactivity time.
#define ADXL345_ACT_INACT_CTL 0x27 // R/W Axis enable control for activity
// and inactivity detection.
#define ADXL345_THRESH_FF 0x28 // R/W Free-fall threshold.
#define ADXL345_TIME_FF 0x29 // R/W Free-fall time.
#define ADXL345_TAP_AXES 0x2A // R/W Axis control for tap/double tap.
#define ADXL345_ACT_TAP_STATUS 0x2B // R Source of tap/double tap.
35.5.5 设置功耗模式
ADXL345的功耗模式分为标准模式和测量模式,通过寄存器地址0x2D设置:
#define ADXL345_POWER_CTL 0x2D // R/W Power saving features control.
static void adxl345_set_power_mode(uint8_t pwr_mode)
{
uint8_t old_power_ctl = 0;
uint8_t new_power_ctl = 0;
old_power_ctl = adxl345_get_register_value(ADXL345_POWER_CTL);
new_power_ctl = old_power_ctl & ~ADXL345_PCTL_MEASURE;
new_power_ctl = new_power_ctl | (pwr_mode * ADXL345_PCTL_MEASURE);
adxl345_set_register_value(ADXL345_POWER_CTL, new_power_ctl);
}
35.5.6 读取每个通道的坐标
读取坐标值的寄存器起始地址是0x32:
#define ADXL345_DATAX0 0x32 // R X-Axis Data 0.
static void adxl345_get_xyz(int16_t *x, int16_t *y, int16_t *z)
{
if(NULL == pADXLSPI) return;
uint8_t first_reg_address = ADXL345_DATAX0;
uint8_t read_buffer[7] = {
0, 0, 0, 0, 0, 0, 0};
read_buffer[0] = ADXL345_SPI_READ | ADXL345_SPI_MB | first_reg_address;
pADXLSPI->WriteRead(pADXLSPI, read_buffer, read_buffer, 7);
/* x = ((ADXL345_DATAX1) << 8) + ADXL345_DATAX0 */
*x = (int16_t)((read_buffer[2] << 8) + read_buffer[1]);
/* y = ((ADXL345_DATAY1) << 8) + ADXL345_DATAY0 */
*y = (int16_t)((read_buffer[4] << 8) + read_buffer[3]);
/* z = ((ADXL345_DATAZ1) << 8) + ADXL345_DATAZ0 */
*z = (int16_t)((read_buffer[6] << 8) + read_buffer[5]);
}
35.5.7 读取每个通道的加速度
加速度值是通过3轴坐标值计算转换过来的,计算方法在手册的【偏移校准】节有详细解释,此处参考官网给出的计算方法:
/* ADXL345 Full Resolution Scale Factor */
#define ADXL345_SCALE_FACTOR 0.0039
static void adxl345_get_g_xyz(float *x, float *y, float *z)
{
int16_t x_data = 0; // X-axis's output data.
int16_t y_data = 0; // Y-axis's output data.
int16_t z_data = 0; // Z-axis's output data.
adxl345_get_xyz(&x_data, &y_data, &z_data);
*x = (float)(gADXL345.full_resolution_set ? (x_data * ADXL345_SCALE_FACTOR) :
(x_data * ADXL345_SCALE_FACTOR * (gADXL345.selected_range >> 1)));
*y = (float)(gADXL345.full_resolution_set ? (y_data * ADXL345_SCALE_FACTOR) :
(y_data * ADXL345_SCALE_FACTOR * (gADXL345.selected_range >> 1)));
*z = (float)(gADXL345.full_resolution_set ? (z_data * ADXL345_SCALE_FACTOR) :
(z_data * ADXL345_SCALE_FACTOR * (gADXL345.selected_range >> 1)));
}
35.5.8 使能/关闭敲击检测
敲击检测涉及一系列的寄存器读写控制:
#define ADXL345_THRESH_TAP 0x1D // R/W Tap threshold.
#define ADXL345_DUR 0x21 // R/W Tap duration.
#define ADXL345_LATENT 0x22 // R/W Tap latency.
#define ADXL345_WINDOW 0x23 // R/W Tap window.
#define ADXL345_TAP_AXES 0x2A // R/W Axis control for tap/double tap.
然后通过设置这些寄存器的值来配置ADXL345的敲击检测功能:
static void adxl345_set_tap_detection(uint8_t tap_type,
uint8_t tap_axes,
uint8_t tap_dur,
uint8_t tap_latent,
uint8_t tap_window,
uint8_t tap_thresh,
uint8_t tap_int)
{
uint8_t old_tap_axes = 0;
uint8_t new_tap_axes = 0;
uint8_t old_int_map = 0;
uint8_t new_int_map = 0;
uint8_t old_int_enable = 0;
uint8_t new_int_enable = 0;
old_tap_axes = adxl345_get_register_value(ADXL345_TAP_AXES);
new_tap_axes = old_tap_axes & ~(ADXL345_TAP_X_EN |ADXL345_TAP_Y_EN |ADXL345_TAP_Z_EN);
new_tap_axes = new_tap_axes | tap_axes;
adxl345_set_register_value(ADXL345_TAP_AXES, new_tap_axes);
adxl345_set_register_value(ADXL345_DUR, tap_dur);
adxl345_set_register_value(ADXL345_LATENT, tap_latent);
adxl345_set_register_value(ADXL345_WINDOW, tap_window);
adxl345_set_register_value(ADXL345_THRESH_TAP, tap_thresh);
old_int_map = adxl345_get_register_value(ADXL345_INT_MAP);
new_int_map = old_int_map & (~(ADXL345_SINGLE_TAP | ADXL345_DOUBLE_TAP));
new_int_map = new_int_map | tap_int;
adxl345_set_register_value(ADXL345_INT_MAP, new_int_map);
old_int_enable = adxl345_get_register_value(ADXL345_INT_ENABLE);
new_int_enable = old_int_enable & (~(ADXL345_SINGLE_TAP | ADXL345_DOUBLE_TAP));
new_int_enable = new_int_enable | tap_type;
adxl345_set_register_value(ADXL345_INT_ENABLE, new_int_enable);
}
35.5.9 使能/关闭活动检测
配置活动检测的寄存器地址有:
#define ADXL345_ACT_INACT_CTL 0x27 // R/W Axis enable control for activity
#define ADXL345_THRESH_ACT 0x24 // R/W Activity threshold.
#define ADXL345_INT_ENABLE 0x2E // R/W Interrupt enable control.
#define ADXL345_INT_MAP 0x2F // R/W Interrupt mapping control.
通过配置这些寄存器来选择活动检测的方法和参数:
static void adxl345_set_activity_detection(uint8_t act_on_off,
uint8_t act_axes,
uint8_t act_ac_dc,
uint8_t act_thresh,
uint8_t act_int)
{
uint8_t old_act_inact_ctl = 0;
uint8_t new_act_inact_ctl = 0;
uint8_t old_int_map = 0;
uint8_t new_int_map = 0;
uint8_t old_int_enable = 0;
uint8_t new_int_enable = 0;
old_act_inact_ctl = adxl345_get_register_value(ADXL345_INT_ENABLE);
new_act_inact_ctl = old_act_inact_ctl & ~(ADXL345_ACT_ACDC | ADXL345_ACT_X_EN | ADXL345_ACT_Y_EN | ADXL345_ACT_Z_EN);
new_act_inact_ctl = new_act_inact_ctl | (act_ac_dc | act_axes);
adxl345_set_register_value(ADXL345_ACT_INACT_CTL, new_act_inact_ctl);
adxl345_set_register_value(ADXL345_THRESH_ACT, act_thresh);
old_int_map = adxl345_get_register_value(ADXL345_INT_MAP);
new_int_map = old_int_map & ~(ADXL345_ACTIVITY);
new_int_map = new_int_map | act_int;
adxl345_set_register_value(ADXL345_INT_MAP, new_int_map);
old_int_enable = adxl345_get_register_value(ADXL345_INT_ENABLE);
new_int_enable = old_int_enable & ~(ADXL345_ACTIVITY);
new_int_enable = new_int_enable | (ADXL345_ACTIVITY * act_on_off);
adxl345_set_register_value(ADXL345_INT_ENABLE, new_int_enable);
}
35.5.10 初始化ADXL345
初始化ADXL345时,需要初始化SPI控制器,另外还需要设置ADXL345自身的工作模式和检测属性:
static int ADXLDevInit(struct ADXL345Dev *ptdev)
{
if(NULL == ptdev) return -EINVAL;
pINT1IO = IODeviceFind("ADXL345 INT1");
if(NULL == pINT1IO) return -ENXIO;
pADXLSPI = SPIDeviceFind("ADXL345 SPI");
if(NULL == pADXLSPI) return -ENXIO;
if(ESUCCESS != pADXLSPI->Init(pADXLSPI)) return -EIO;
if (adxl345_get_register_value(ADXL345_DEVID) != ADXL345_ID)
{
xprintf("Failed to read ADXL345's ID!\r\n");
return -EIO;
}
adxl345_set_power_mode(0x01); /* measure(1)/standby(0) mode.*/
adxl345_set_range_resolution(ADXL345_RANGE_PM_16G, /* Range option. +- 16g */
ADXL345_FULL_RES); /*Enables full resolution*/
adxl345_set_tap_detection(ADXL345_SINGLE_TAP | ADXL345_DOUBLE_TAP, /* Tap type (none, single, double) */
ADXL345_TAP_X_EN | ADXL345_TAP_Y_EN | ADXL345_TAP_Z_EN, /* tap_axes */
0x0D, /* tap_dur */
0x50, /* tap_latent */
0xF0, /* tap_window */
0x20, /* Tap threshold */
0x00); /* Interrupts pin.0x0 - interrupts on INT1 pin */
adxl345_set_activity_detection(0x01, /* enables(1)/disable(0) the activity detection. */
ADXL345_ACT_X_EN | ADXL345_ACT_Y_EN | ADXL345_ACT_Z_EN, /* Axes which participate in detecting activity. */
0x00, /* dc(0)/ac(ADXL345_ACT_ACDC)-coupled operation. */
0x08, /* Threshold value for detecting activity */
0x00); /* Interrupts pin.0-int1 */
adxl345_set_free_fall_detection(0x01, /* disables(0)/enable(1) the free-fall detection. */
0x08, /* Threshold value for free-fall detection. The scale factor */
0x0A, /* Time value for free-fall detection */
0x00); /* Interrupts pin. */
adxl345_get_all_axes();
return ESUCCESS;
}
35.5.11 读取加速度
此函数调用获取三轴加速度的adxl345_get_g_xyz函数,只是将其进行了再次封装:
static int ADXLDevRead(struct ADXL345Dev *ptdev)
{
if(NULL == ptdev) return -EINVAL;
if(NULL == pADXLSPI) return -EIO;
adxl345_get_g_xyz(&ptdev->value.x, &ptdev->value.y, &ptdev->value.z);
return ESUCCESS;
}
35.6 测试程序
将获取到的ADXL345设备对象初始化完毕之后,每隔500ms读一次3轴加速度数据,并将它们打印出来:
void DeviceTest(void)
{
UartDevicesRegister();
TimerDevicesRegister();
SPIDevicesRegister();
IODevicesRegister();
ADXL345Device *pADXL345 = ADXL345GetDevice();
if(NULL == pADXL345)
{
xprintf("Failed to Find ADXL345 Device!\r\n");
return;
}
pADXL345->Init(pADXL345);
while(1)
{
if(pADXL345->Read(pADXL345) == ESUCCESS)
{
xprintf("x:%.4fg\ty:%.4fg\tz:%.4fg\r\n", pADXL345->value.x, pADXL345->value.y, pADXL345->value.z);
}
mdelay(500);
}
}
35.7 测试结果
将程序烧写到开发板上运行,打开串口助手并且插上扩展板以及接上ADXL345模块,可以观察到下图所示的结果:
