本节推导误差卡尔曼滤波公式,用以计算误差状态量的置信度。
VINS-Mono/Fusion代码学习系列:
从零学习VINS-Mono/Fusion源代码(一):主函数
从零学习VINS-Mono/Fusion源代码(二):前端图像跟踪
从零学习VINS-Mono/Fusion源代码(三):IMU预积分公式推导
从零学习VINS-Mono/Fusion源代码(四):误差卡尔曼滤波
从零学习VINS-Mono/Fusion源代码(五):VIO初始化
从零学习VINS-Mono/Fusion源代码(六):后端优化
从零学习VINS-Mono/Fusion源代码(四):误差卡尔曼滤波
误差卡尔曼滤波就是以误差值作为滤波状态量. IMU预积分中使用误差卡尔曼滤波来计算置信度,得到误差的协方差矩阵.
(主要是因为旋转四元数引起的过参数化问题)
1 为什么要用误差卡尔曼滤波?
- IMU预积分中使用四元数表示旋转,但是四元数是过参数化的,需要用4x4的矩阵来描述置信度;在误差卡尔曼滤波中,用旋转向量作为参数,这样就可以用3x3的协方差矩阵来衡量旋转的置信度.
- 误差通常是很小的,接近0,这样就避免了旋转向量的周期性问题.
- 误差量很小,可以忽略二阶导数的计算,只计算一阶导数更快.
- 误差变化很慢,用卡尔曼滤波进行状态修正时,可以降低观测频率.
2 连续时间IMU误差状态传递
vins论文公式:

推导速度:


推导姿态: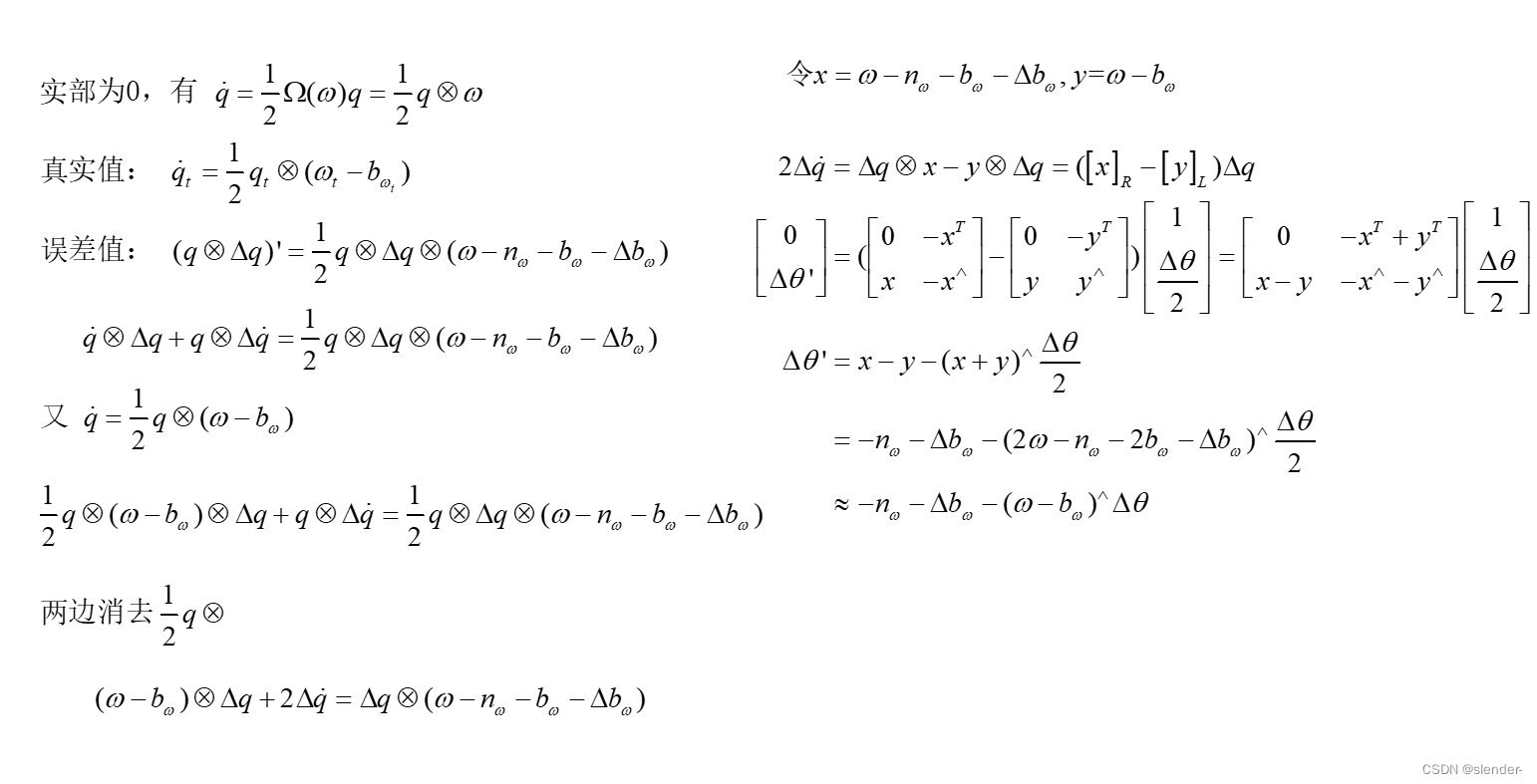
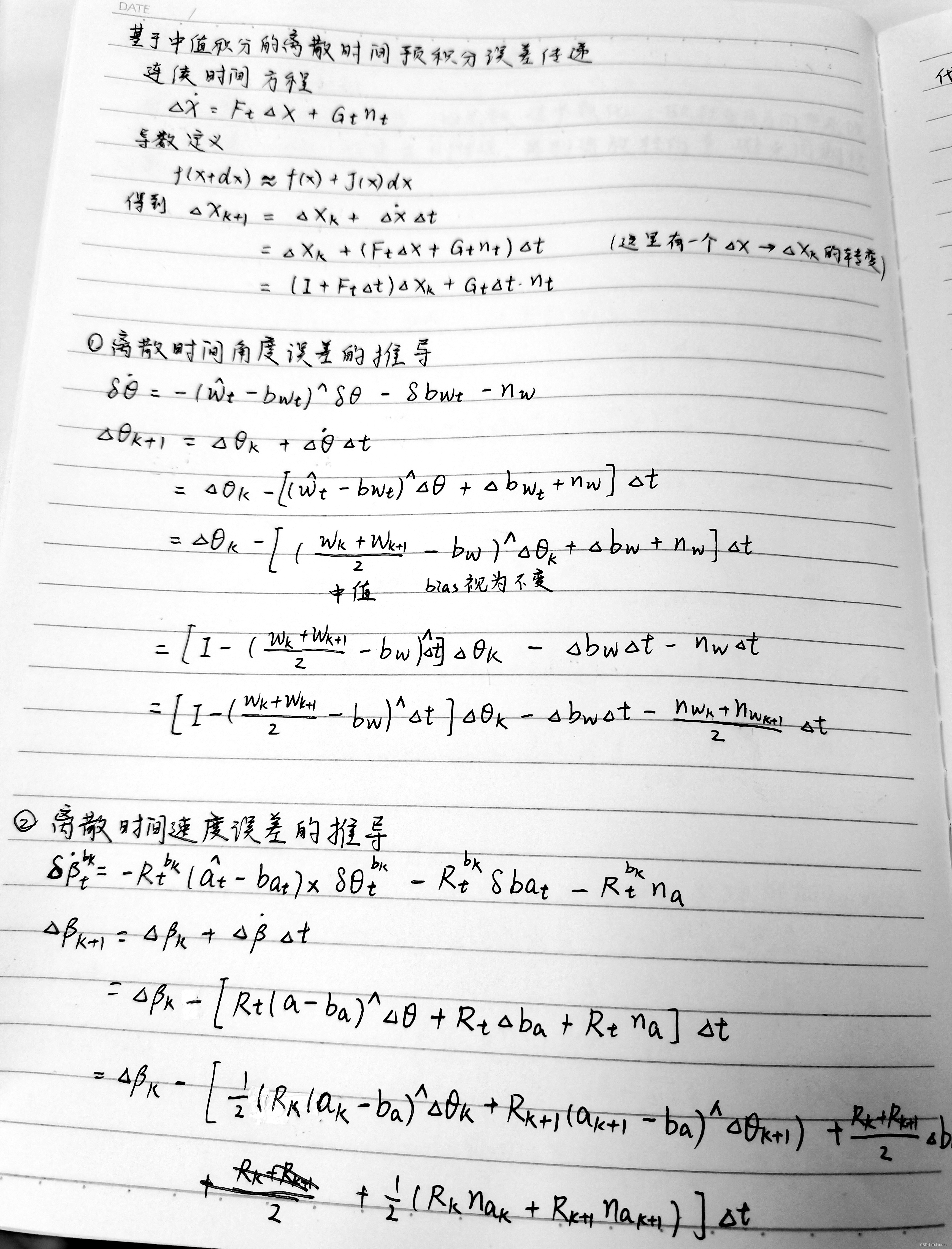
3 离散时间预积分误差传递

同样,利用中值积分推算,在两帧IMU时刻之间,认为零偏不变。

4 IMU零偏建模
在上面的推导中认为IMU零偏是不变的,但是VINS优化过程中,零偏也会被优化,导致对应的IMU预积分可能需要重新计算。因此,利用误差雅克比对IMU预积分进行修正。

扫描二维码关注公众号,回复:
16762635 查看本文章

为了方便维护,VINS代码中建立了一个15x15的雅克比矩阵,在初始状态下为单位阵I:


5 代码阅读
在integration_base.h头文件中找到类IntegrationBase,看到它的构造函数:它依赖于初始时刻的加速度计和陀螺零偏;维护了15x15的jacobian矩阵,初始值为单位阵;构造误差协方差矩阵covariance,初始为0.
noise对应噪声协方差矩阵V.
IntegrationBase(const Eigen::Vector3d &_acc_0, const Eigen::Vector3d &_gyr_0,
const Eigen::Vector3d &_linearized_ba, const Eigen::Vector3d &_linearized_bg)
: acc_0{
_acc_0}, gyr_0{
_gyr_0}, linearized_acc{
_acc_0}, linearized_gyr{
_gyr_0},
linearized_ba{
_linearized_ba}, linearized_bg{
_linearized_bg},
jacobian{
Eigen::Matrix<double, 15, 15>::Identity()}, covariance{
Eigen::Matrix<double, 15, 15>::Zero()},
sum_dt{
0.0}, delta_p{
Eigen::Vector3d::Zero()}, delta_q{
Eigen::Quaterniond::Identity()}, delta_v{
Eigen::Vector3d::Zero()}
{
noise = Eigen::Matrix<double, 18, 18>::Zero();
noise.block<3, 3>(0, 0) = (ACC_N * ACC_N) * Eigen::Matrix3d::Identity();
noise.block<3, 3>(3, 3) = (GYR_N * GYR_N) * Eigen::Matrix3d::Identity();
noise.block<3, 3>(6, 6) = (ACC_N * ACC_N) * Eigen::Matrix3d::Identity();
noise.block<3, 3>(9, 9) = (GYR_N * GYR_N) * Eigen::Matrix3d::Identity();
noise.block<3, 3>(12, 12) = (ACC_W * ACC_W) * Eigen::Matrix3d::Identity();
noise.block<3, 3>(15, 15) = (GYR_W * GYR_W) * Eigen::Matrix3d::Identity();
}
在midPointIntegration()中,中值积分更新完状态量后,更新协方差阵和雅克比矩阵,套用基于中值积分的离散时间预积分误差传递公式:
if(update_jacobian)
{
Vector3d w_x = 0.5 * (_gyr_0 + _gyr_1) - linearized_bg;
Vector3d a_0_x = _acc_0 - linearized_ba;
Vector3d a_1_x = _acc_1 - linearized_ba;
Matrix3d R_w_x, R_a_0_x, R_a_1_x;
R_w_x<<0, -w_x(2), w_x(1),
w_x(2), 0, -w_x(0),
-w_x(1), w_x(0), 0;
R_a_0_x<<0, -a_0_x(2), a_0_x(1),
a_0_x(2), 0, -a_0_x(0),
-a_0_x(1), a_0_x(0), 0;
R_a_1_x<<0, -a_1_x(2), a_1_x(1),
a_1_x(2), 0, -a_1_x(0),
-a_1_x(1), a_1_x(0), 0;
MatrixXd F = MatrixXd::Zero(15, 15);
F.block<3, 3>(0, 0) = Matrix3d::Identity();
F.block<3, 3>(0, 3) = -0.25 * delta_q.toRotationMatrix() * R_a_0_x * _dt * _dt +
-0.25 * result_delta_q.toRotationMatrix() * R_a_1_x * (Matrix3d::Identity() - R_w_x * _dt) * _dt * _dt;
F.block<3, 3>(0, 6) = MatrixXd::Identity(3,3) * _dt;
F.block<3, 3>(0, 9) = -0.25 * (delta_q.toRotationMatrix() + result_delta_q.toRotationMatrix()) * _dt * _dt;
F.block<3, 3>(0, 12) = -0.25 * result_delta_q.toRotationMatrix() * R_a_1_x * _dt * _dt * -_dt;
F.block<3, 3>(3, 3) = Matrix3d::Identity() - R_w_x * _dt;
F.block<3, 3>(3, 12) = -1.0 * MatrixXd::Identity(3,3) * _dt;
F.block<3, 3>(6, 3) = -0.5 * delta_q.toRotationMatrix() * R_a_0_x * _dt +
-0.5 * result_delta_q.toRotationMatrix() * R_a_1_x * (Matrix3d::Identity() - R_w_x * _dt) * _dt;
F.block<3, 3>(6, 6) = Matrix3d::Identity();
F.block<3, 3>(6, 9) = -0.5 * (delta_q.toRotationMatrix() + result_delta_q.toRotationMatrix()) * _dt;
F.block<3, 3>(6, 12) = -0.5 * result_delta_q.toRotationMatrix() * R_a_1_x * _dt * -_dt;
F.block<3, 3>(9, 9) = Matrix3d::Identity();
F.block<3, 3>(12, 12) = Matrix3d::Identity();
//cout<<"A"<<endl<<A<<endl;
MatrixXd V = MatrixXd::Zero(15,18);
V.block<3, 3>(0, 0) = 0.25 * delta_q.toRotationMatrix() * _dt * _dt;
V.block<3, 3>(0, 3) = 0.25 * -result_delta_q.toRotationMatrix() * R_a_1_x * _dt * _dt * 0.5 * _dt;
V.block<3, 3>(0, 6) = 0.25 * result_delta_q.toRotationMatrix() * _dt * _dt;
V.block<3, 3>(0, 9) = V.block<3, 3>(0, 3);
V.block<3, 3>(3, 3) = 0.5 * MatrixXd::Identity(3,3) * _dt;
V.block<3, 3>(3, 9) = 0.5 * MatrixXd::Identity(3,3) * _dt;
V.block<3, 3>(6, 0) = 0.5 * delta_q.toRotationMatrix() * _dt;
V.block<3, 3>(6, 3) = 0.5 * -result_delta_q.toRotationMatrix() * R_a_1_x * _dt * 0.5 * _dt;
V.block<3, 3>(6, 6) = 0.5 * result_delta_q.toRotationMatrix() * _dt;
V.block<3, 3>(6, 9) = V.block<3, 3>(6, 3);
V.block<3, 3>(9, 12) = MatrixXd::Identity(3,3) * _dt;
V.block<3, 3>(12, 15) = MatrixXd::Identity(3,3) * _dt;
//更新雅克比和协方差
jacobian = F * jacobian;
covariance = F * covariance * F.transpose() + V * noise * V.transpose();
}