概述
在人脸相关应用中,获得的人脸图像常常形状各异,这时就需要对人脸形状进行归一化处理。人脸对齐就是将两个不同的形状进行归一化的过程,将一个形状尽可能地贴近另一个形状。
值得注意的是,在英语文献中,Face Alignment和Facial Landmark Detection常常混用,在我的系列博客里面,Facial Landmark Detection指的是人脸特征点检测,而Face Alignment指的是人脸对齐。人脸特征点检测是人脸对齐的必要步骤,现在有很多端到端(end to end)的方法不需要进行对齐,所以具体要不要对齐这一步需要结合实际分析。
人脸特征点检测的结果如下:
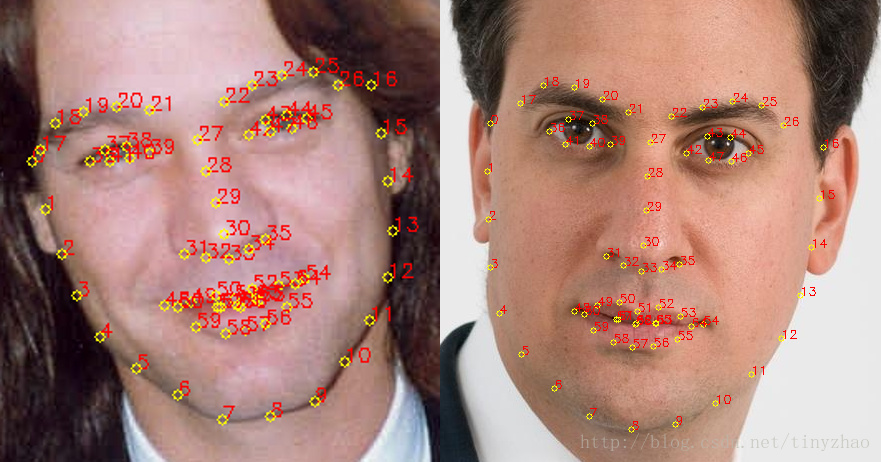
人脸对齐的效果如下,可以看到右边的脸已经和左边的脸形状大体一致:

言归正传,Procrustes analysis是一种用来分析形状分布的统计方法。Procrustes源于古希腊神话中的一个强盗, 他常切断受害者的肢体使其身形与床相匹配,类似地Procrustes分析方法是对两个形状进行归一化处理 。从数学上来讲,普氏分析就是利用最小二乘法寻找形状A到形状B的仿射变换 。
模型
仿射变换
在高中的几何课程中,一定学过平移,放缩和旋转变换。
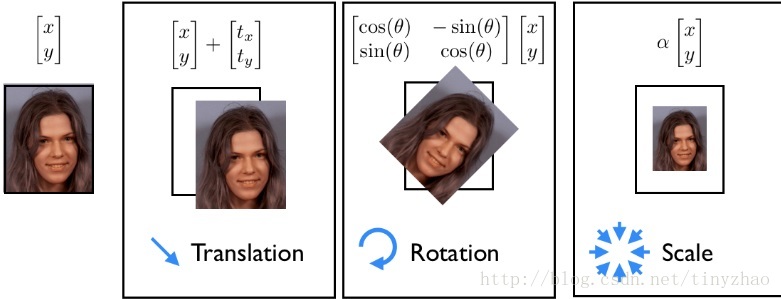
将这三种变换写成矩阵形式:
这个式子中,s就是缩放比例, 就是旋转角度,最后的t代表平移的位移,其中R是一个正交矩阵。
Procrustes analysis
我们现在要解决如何旋转、平移和缩放第一个向量,使它们尽可能对齐第二个向量的点。一个想法是使用仿射变换将第一个图像变换覆盖第二个图像。如何判断这种对齐的效果呢?使用最小二乘法,使得变化后所有点与目标点距离和最小。
两个形状矩阵分别为p和q,矩阵的每一行代表一个特征点的x,y坐标,假设有68个特征点坐标,则。写成数学形式:
其中就是p矩阵的第i行。写成矩阵形式:
代表Frobenius范数,就是每一项的平方和。求解
这个最小值问题是有解析解的。
先放上代码:
#Procrustes analysis
def transformation_from_points(points1, points2):
points1 = points1.astype(numpy.float64)
points2 = points2.astype(numpy.float64)
c1 = numpy.mean(points1, axis=0)
c2 = numpy.mean(points2, axis=0)
points1 -= c1
points2 -= c2
s1 = numpy.std(points1)
s2 = numpy.std(points2)
points1 /= s1
points2 /= s2
U, S, Vt = numpy.linalg.svd(points1.T * points2)
R = (U * Vt).T
return numpy.vstack([numpy.hstack(((s2 / s1) * R,
c2.T - (s2 / s1) * R * c1.T)),
numpy.matrix([0., 0., 1.])])根据
可以知道
需要将式子
进行一些变化,写成Wikipedia式子的形状。这里的变化就需要对原始点集p和q进行一些处理,使得最小化式子发生变化。https://en.wikipedia.org/wiki/Procrustes_analysis#Ordinary_Procrustes_analysis
这里给出了对原始点集的变化步骤。结合代码来看:
c1 = numpy.mean(points1, axis=0)
c2 = numpy.mean(points2, axis=0)
points1 -= c1
points2 -= c2这一步处理消除了平移T的影响。
s1 = numpy.std(points1)
s2 = numpy.std(points2)
points1 /= s1
points2 /= s2这一步处理消除了缩放系数s的影响。
这两步处理以后,R就可以变成求解下面的式子:
这里的A,B不再是原始的数据点集,而是变成了处理以后点集。
根据维基百科,这个式子是可以求解的:
这样就解出了R:
U, S, Vt = numpy.linalg.svd(points1.T * points2)
R = (U * Vt).T源代码最后一步返回的是仿射变换矩阵
用普氏分析(Procrustes analysis)调整脸部
现在我们已经有了两个标记矩阵,每行有一组坐标对应一个特定的面部特征(如第30行给出的鼻子的坐标)。我们现在要搞清楚如何旋转、翻译和规模化第一个向量,使它们尽可能适合第二个向量的点。想法是,可以用相同的变换在第一个图像上覆盖第二个图像。
把它们更数学化,寻找T,s和R,令下面这个表达式的结果最小:
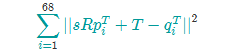
R是个2 x2正交矩阵,s是标量,T是二维向量,pi和qi是上面标记矩阵的行。
事实证明,这类问题可以用“常规普氏分析法” (Ordinary Procrustes Analysis) 解决:
def transformation_from_points(points1, points2):
points1 = points1.astype(numpy.float64)
points2 = points2.astype(numpy.float64)
c1 = numpy.mean(points1, axis=0)
c2 = numpy.mean(points2, axis=0)
points1 -= c1
points2 -= c2
s1 = numpy.std(points1)
s2 = numpy.std(points2)
points1 /= s1
points2 /= s2
U, S, Vt = numpy.linalg.svd(points1.T * points2)
R = (U * Vt).T
return numpy.vstack([numpy.hstack(((s2 / s1) * R,
c2.T - (s2 / s1) * R * c1.T)),
numpy.matrix([0., 0., 1.])])代码分别实现了下面几步:
- 将输入矩阵转换为浮点数。这是之后步骤的必要条件。
- 每一个点集减去它的矩心。一旦为这两个新的点集找到了一个最佳的缩放和旋转方法,这两个矩心c1和c2就可以用来找到完整的解决方案。
- 同样,每一个点集除以它的标准偏差。这消除了问题的组件缩放偏差。
- 使用Singular Value Decomposition计算旋转部分。可以在维基百科上看到关于解决正交普氏问题的细节(https://en.wikipedia.org/wiki/Orthogonal_Procrustes_problem)。
- 利用仿射变换矩阵(https://en.wikipedia.org/wiki/Transformation_matrix#Affine_transformations)返回完整的转化。
之后,结果可以插入OpenCV的cv2.warpAffine函数,将图像二映射到图像一:
def warp_im(im, M, dshape):
output_im = numpy.zeros(dshape, dtype=im.dtype)
cv2.warpAffine(im,
M[:2],
(dshape[1], dshape[0]),
dst=output_im,
borderMode=cv2.BORDER_TRANSPARENT,
flags=cv2.WARP_INVERSE_MAP)
return output_im