文章目录
前言
OpenMV 摄像机(OpenMV camera)是一种可编程摄像机,支持光流。
25.5.1 在哪里购买
传感器可直接从 openmv.io 购买。
25.5.2 与自动驾驶仪连接
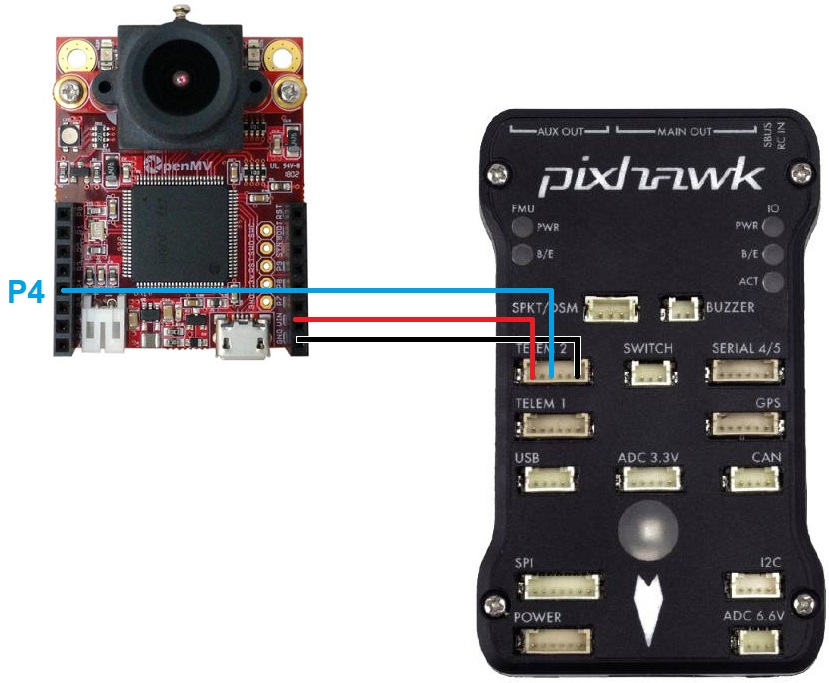
1. 相机应安装在旋翼飞机底部,镜头朝下。带镜头的摄像头边缘应朝向飞行器前方。上图不正确,因为自动驾驶仪的箭头朝下,而传感器镜头靠近顶部。
2. 如上图所示,将相机的 P4、VIN 和 GND 引脚连接到自动驾驶仪的一个串行端口。上图中,传感器连接到 Pixhawk 的 Telem2 端口。
3. 设置 FLOW_TYPE = 5(MAVLink)。
4. 如果使用 Serial2/Telem2,则设置 SERIAL2_PROTOCOL = 1 (MAVLink);如果连接到其他串行端口,则使用相应的 SERIALx_PROTOCOL 参数。
5. 设置 SERIAL2_BAUD = 115。
!Note
相机的官方引脚分配见此处(here)。
{kind=link}
25.5.3 相机设置
官方设置信息可在此处(here)找到,但简表如下:
1. 将 OpenMV 摄像机连接到计算机。在 Windows 系统中,摄像机应显示为一个新的 COM 端口,同时也应创建一个虚拟驱动器(脚本将复制到此)。
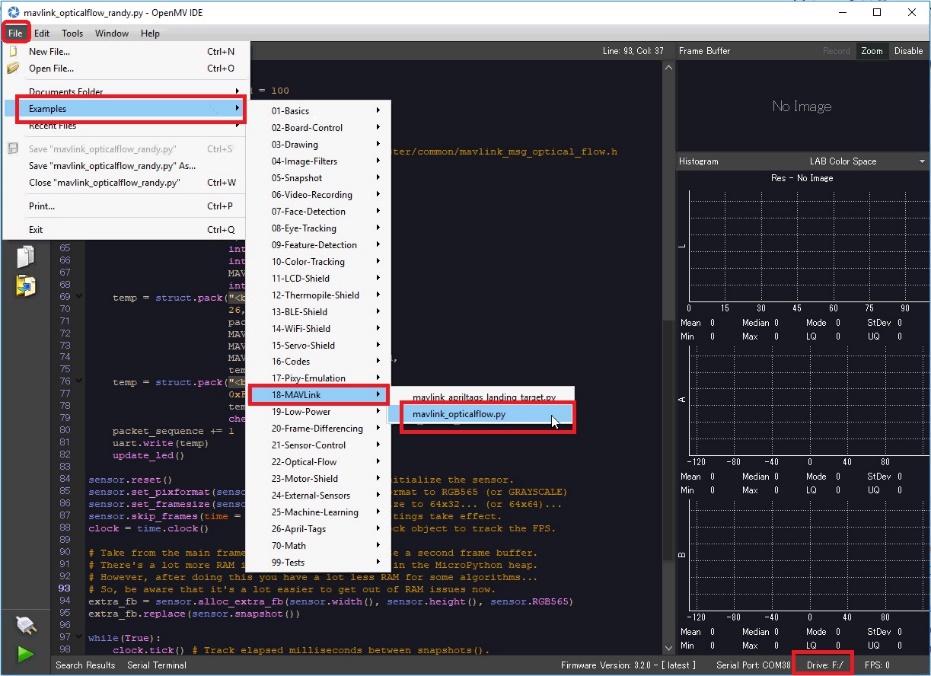
2. 下载、安装并运行 OpenMV 集成开发环境(Download, install and run the OpenMV IDE)。
3. 选择文件,示例,18-MAVLink,mavlink_opticalflow.py。
4. 在右下角,选择与 OpenMV 摄像机虚拟驱动器相对应的驱动器。
5. 选择"工具",将打开的脚本保存到 OpenMV 摄像机。
6. 选择工具,重置 OpenMV 摄像机。
7. 摄像机上的绿灯应开始闪烁,表明脚本正在运行。
25.5.4 附加说明
与 PX4Flow 传感器(PX4Flow sensor)一样,使用该传感器的自主模式(包括 Loiter 和 RTL)也需要测距仪。
FlowHold 不需要使用测距仪。
该传感器已在约 10m 的高度成功进行了测试。
可以通过设置传感器位置参数(sensors position parameters)来提高性能。例如,如果传感器安装在框架旋转中心向前 2cm、向下 5cm 的位置,则将 FLOW_POS_X 设置为 0.02,将 FLOW_POS_Z 设置为 0.05。
25.5.5 测试和设置
有关设置指南,请参阅光学流量传感器测试和设置(Optical Flow Sensor Testing and Setup)。
请注意,该传感器的 EK2_FLOW_DELAY 或 EK3_FLOW_DELAY 推荐值为 80。
25.5.6 参数说明
1. FLOW_POS_X:X 位置偏移
注意:该参数适用于高级用户。
光流传感器焦点在主体框架中的 X 位置。正 X 位于原点的前方。
| Increment |
Range |
Units |
|---|---|---|
| 0.01 |
-5 to 5 |
meters |
2. FLOW_POS_Z:Z 位置偏移
注意:该参数适用于高级用户。
光流传感器焦点在主体框架中的 Z 位置。正 Z 表示从原点向下。
| Increment |
Range |
Units |
|---|---|---|
| 0.01 |
-5 to 5 |
meters |