ros环境配置篇
环境配置在vmware上安装ubantu16.04操作系统
左手按住alt键右手鼠标往上拖动安装界面,即可显示完全内容。。。
就。。。挺无语的
安装完成后显示界面太小解决办法
修改屏幕分辨率:
https://blog.csdn.net/Dontla/article/details/120925234
其他遇到的一些ubantu问题
- apt未被正确安装
当用户在Ubuntu系统下输入sudo apt时,实际上是执行一条叫做apt-get的命令。如果用户没有正确安装apt-get命令,即使输入了正确的sudo apt命令,系统也会提示找不到命令。
代码示例
sudo: apt-get: command not found
解决:
- apt未被正确安装
在Ubuntu系统中,apt-get被默认安装,如果未安装,可以使用以下命令重新安装。
代码示例
sudo apt-get install apt
最后一步是在ubantu16上安装ros-kinetic
参考大佬文章,基本上很短时间就安装好了
https://blog.csdn.net/qq_45539458/article/details/106456408
(为了防止大佬文章没了,我复制过来一遍)
使用中科大的源
sudo sh -c '. /etc/lsb-release && echo "deb https://mirrors.ustc.edu.cn/ros/ubuntu/ $DISTRIB_CODENAME main" > /etc/apt/sources.list.d/ros-latest.list'
设置key
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
更新
sudo apt-get update
数字签名无效或者过期时参考,一般不会,注意尽量不要连校园网
https://www.cnblogs.com/lishanlei/p/10707819.html
sudo apt-key adv --keyserver keyserver.ubuntu.com --recv-keys 8C718D3B5072E1F5
sudo apt-key adv --keyserver keyserver.ubuntu.com --recv-keys 58712A2291FA4AD5
sudo apt-key adv --keyserver keyserver.ubuntu.com --recv-keys F42ED6FBAB17C654
安装kinetic完整版
sudo apt-get install ros-kinetic-desktop-full
安装中断时可以
sudo apt-get update
sudo apt-get install ros-kinetic-desktop-full
和校验失败可以
sudo dpkg --configure -a
sudo apt-get install ros-kinetic-desktop-full
初始化rosdep
sudo rosdep init
rosdep update
若出现ERROR
sudo gedit /etc/hosts
添加
199.232.28.133 raw.githubusercontent.com
配置环境变量
echo "source /opt/ros/kinetic/setup.bash" >> ~/.bashrc
source ~/.bashrc
或者
sudo gedit ~/.bashrc
添加source /opt/ros/kinetic/setup.bash
安装依赖项
sudo apt-get install python-rosinstall python-rosinstall-generator python-wstool build-essential
测试
三个窗口分别打开
roscore
rosrun turtlesim turtlesim_node
rosrun turtlesim turtle_teleop_key
在三个窗口打开以上命令,出现小乌龟,并可以在第三个窗口使用键盘控制乌龟移动,则成功
出现: 程序“roscore”尚未安装。 您可以使用以下命令安装:apt install python-roslaunch,参考[https://www.jianshu.com/p/bfbc833c719b],可能还是配置环境变量时有问题(https://www.jianshu.com/p/bfbc833c719b)
https://github.com/ros/catkin.git 下载kinetic-devel分支
mkdir build
cd build
cmake ..
sudo chmod +x Makefile
make -j8
sudo make install
cd ..
python2 setup.py install
实在不行
sudo apt-get install aptitude
sudo aptitude install python-roslaunch
不接受第一种方案,n
用第二种方案y
到这里,环境基本配置就没啥问题了
其他
安装一些比较实用的开发工具
很重要的一个工具是安装vmware-tool,可以支持把外部的文件或文字传入到虚拟机中
管理不同的终端的软件
sudo apt install terminator
常用快捷键:
Alt+Up //移动到上面的终端
Alt+Down //移动到下面的终端
Alt+Left //移动到左边的终端
Alt+Right //移动到右边的终端
Ctrl+Shift+O //水平分割终端
Ctrl+Shift+E //垂直分割终端
Ctrl+Shift+Right //在垂直分割的终端中将分割条向右移动
Ctrl+Shift+Left //在垂直分割的终端中将分割条向左移动
Ctrl+Shift+Up //在水平分割的终端中将分割条向上移动
Ctrl+Shift+Down //在水平分割的终端中将分割条向下移动
Ctrl+Shift+S //隐藏/显示滚动条
Ctrl+Shift+F //搜索
Ctrl+Shift+C //复制选中的内容到剪贴板
Ctrl+Shift+V //粘贴剪贴板的内容到此处
Ctrl+Shift+W //关闭当前终端
Ctrl+Shift+Q //退出当前窗口,当前窗口的所有终端都将被关闭
Ctrl+Shift+X //最大化显示当前终端
Ctrl+Shift+Z //最大化显示当前终端并使字体放大
Ctrl+Shift+N or Ctrl+Tab //移动到下一个终端
Ctrl+Shift+P or Ctrl+Shift+Tab //Crtl+Shift+Tab 移动到之前的一个终端
F11 //全屏开关
Ctrl+Shift+T //打开一个新的标签
Ctrl+PageDown //移动到下一个标签
Ctrl+PageUp //移动到上一个标签
Ctrl+Shift+PageDown //将当前标签与其后一个标签交换位置
Ctrl+Shift+PageUp //将当前标签与其前一个标签交换位置
Ctrl+Plus (+) //增大字体
Ctrl+Minus (-) //减小字体
Ctrl+Zero (0) //恢复字体到原始大小
Ctrl+Shift+R //重置终端状态
Ctrl+Shift+G //重置终端状态并 clear 屏幕
Super+g //绑定所有的终端,以便向一个输入能够输入到所有的终端
Super+Shift+G //解除绑定
Super+t //绑定当前标签的所有终端,向一个终端输入的内容会
自动输入到其他终端
Super+Shift+T //解除绑定
Ctrl+Shift+I //打开一个窗口,新窗口与原来的窗口使用同一个进程
Super+i //打开一个新窗口,新窗口与原来的窗口使用不同的进程
代码编辑器vscode
ubuntu16.04安装vscode遇到的code 依赖于 libnss3 (>= 2:3.30)解决:
不要用最新版的,换成2022年七月份的就可以了
安装中文输入法
使用ibus框架
参考自文章(跟了好几篇文章,只有这篇文章成功了):
http://t.csdnimg.cn/QrN4n
1.ibus简介
IBUS(英文全称为Intelligent Input Bus),是GNU/Linux和类UNIX操作系统下的以GPL协议分发源代码的开源免费多语言输入法框架。
因为它采用了总线(Bus)式的架构,所以命名为Bus。IBus支持多种输入法,如拼音输入法(包括全/简/双拼),并支持基于码表的输入法,如五笔、郑码、二笔和仓颉等输入法,是多个流行的GNU/Linux发行版(如Debian,RedHat等)的默认非英文输入法平台。
2.安装ibus输入框架
sudo apt-get install ibus ibus-pinyin
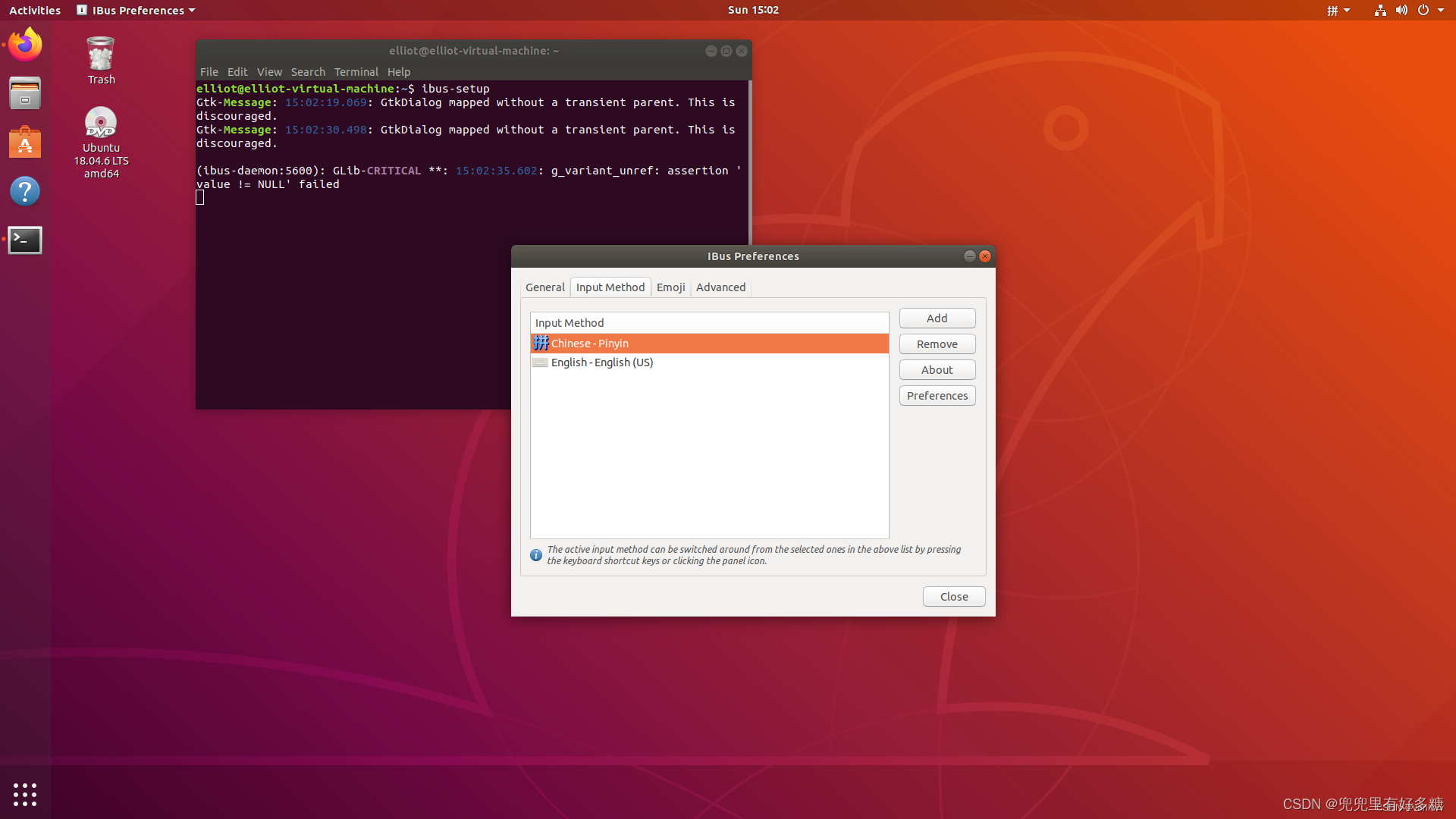
3.配置ibus的输入方式
sudo ibus-setup
默认的 “General”(常规)设置应该可以用,但是最好点击 “Input Methods”(输入法),在下拉式列表框中选择你的输入法,点击 “Add”(添加)。
4.重启
sudo reboot
5.切换输入方式
用组合键:
<Super>space即Windows+空格键
若有多种输入语言,可按住Windows键不动调节空格键来选择你的输入语言。
相关ros安装包的安装:
serial
作为ROS与下位机通讯的功能包,可以很方便的供我们与我们的下位机通信。
安装 ros-kinetic-serial 包
// 安装
sudo apt install ros-kinetic-serial
ddynamic-reconfigure
sudo apt-get install ros-kinetic-ddynamic-reconfigure