专栏:数据结构复习之路
复习完上面三章【线性表】【栈和队列】【串】,我们接着复习数组和广义表,这篇文章我写的非常详细且通俗易懂,看完保证会带给你不一样的收获。如果对你有帮助,看在我这么辛苦整理的份上,三连一下啦![]()

目录
一、数组的定义
数组和广义表可看成是一种特殊的线性表,其特殊在于: 表中的元素本身也是一种线性表,。内存连续。根据下标在O(1)时间读/写任何元素。
数组特点:结构固定,定义后维数和维界不再改变。
数组基本操作:除了结构的初始化和销毁之外, 只有取元素和修改元素值的操作
二、数组的顺序表示和实现
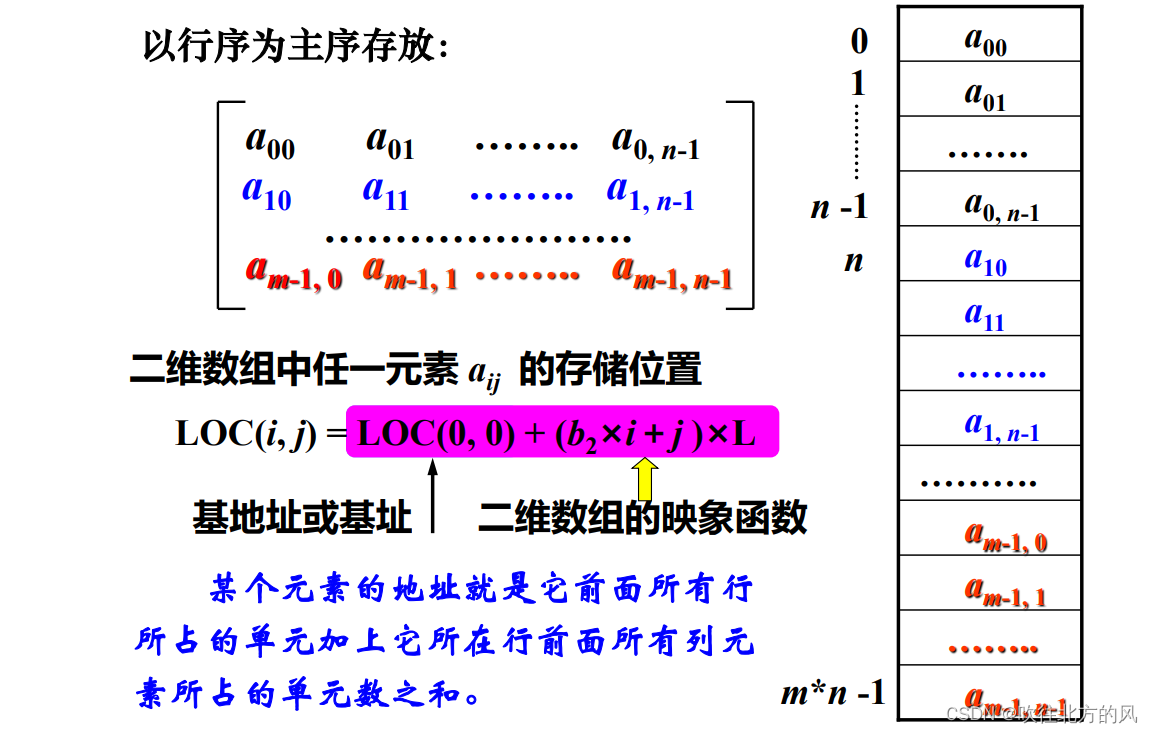
一般都是采用顺序存储结构来表示数组,但数组可以是多维的,并且存储数据元素的内存单元地址是一维的,因此,在存储数组结构之前,需要解决将多维关系映射到一维关系的问题。
两种顺序存储方式:
- 以行序为主序 (低下标优先)
- 以列序为主序 (高下标优先)

例题:
设数组 A[0…59, 0…69] 的基地址为 2048,每个元素占 2 个存储单元,若以列序为主序顺序存储,则元素 A[31, 57] 的存储地址为______。

同理,对三维数组A[b1 ][b2 ][b3 ],可以看成b1个b2 × b3的二维数组, 若首元素的存储地址为LOC[0,0,0],则按行序为主序存放。

则元素 的存储地址为 LOC( i , 0 , 0) = LOC(0,0,0) + ( i × b2 × b3 ) * L
这是因为该元素之前有 i 个b2× b3的二维数组.
所以的存储地址为 LOC( i , j , k) = LOC(0,0,0) + ( i × b2 × b3 + j × b3 + k) * L
推广到一般情况,可得到 n 维数组数据元素存储位置的映像关系:
LOC(j1 ,j2 ,…,jn )=LOC(0,0,0)+(b2×…×bn×j1+ b3×…×bn×j2+…+bn× jn-1+ jn ) × L
代码实现:(选择性掌握,可能有些学校不怎么考察)
看完这个博客的介绍,你也许就能理解如下代码的实现了:
这里我构造一个a[3][4][2]的三维数组,并给出完整可运行代码,自己参悟(有详细注释)。
#include<stdarg.h>
#include<malloc.h>
#include<stdio.h>
#include<stdlib.h> // atoi()
#include<io.h> // eof()
#include<math.h>
#define TRUE 1
#define FALSE 0
#define OK 1
#define ERROR 0
#define INFEASIBLE -1
#define OVERFLOW 3
#define UNDERFLOW 4
typedef int Status; //Status是函数的类型,其值是函数结果状态代码,如OK等
typedef int Boolean; //Boolean是布尔类型,其值是TRUE或FALSE
typedef int ElemType;
#define MAX_ARRAY_DIM 8 //假设数组维数的最大值为8
typedef struct
{
ElemType* base; //数组元素基址,由InitArray分配
int dim; //数组维数
int* bounds; //数组维界基址,由InitArray分配
int* constants; // 数组映象函数常量基址,由InitArray分配,即每变化一维的跨度,方便计算出base数组对应的下标
} Array;
Status InitArray(Array& A, int dim, ...)
{
//若维数dim和各维长度合法,则构造相应的数组A,并返回OK
int elemtotal = 1, i; // elemtotal是元素总值
va_list ap;
if (dim<1 || dim>MAX_ARRAY_DIM)
return ERROR;
A.dim = dim;
A.bounds = (int*)malloc(dim * sizeof(int));
if (!A.bounds)
exit(OVERFLOW);
va_start(ap, dim);
for (i = 0; i < dim; ++i)
{
A.bounds[i] = va_arg(ap, int); //依次取出bound1 = 3, bound2 = 4, bound3 = 2
if (A.bounds[i] < 0)
return UNDERFLOW;
elemtotal *= A.bounds[i];
}
va_end(ap);
A.base = (ElemType*)malloc(elemtotal * sizeof(ElemType));
if (!A.base)
exit(OVERFLOW);
A.constants = (int*)malloc(dim * sizeof(int));
if (!A.constants)
exit(OVERFLOW);
A.constants[dim - 1] = 1; //一维跨度为1
for (i = dim - 2; i >= 0; --i)
A.constants[i] = A.bounds[i + 1] * A.constants[i + 1]; //计算其余维度跨度
return OK;
}
Status DestroyArray(Array* A)
{
//销毁数组A
if ((*A).base)
{
free((*A).base);
(*A).base = NULL;
}
else
return ERROR;
if ((*A).bounds)
{
free((*A).bounds);
(*A).bounds = NULL;
}
else
return ERROR;
if ((*A).constants)
{
free((*A).constants);
(*A).constants = NULL;
}
else
return ERROR;
return OK;
}
Status Locate(Array A, va_list ap, int* off) // Value()、Assign()调用此函数 */
{
//若ap指示的各下标值合法,则求出该元素在A中的相对地址off
int i, ind;
*off = 0;
for (i = 0; i < A.dim; i++)
{
ind = va_arg(ap, int);
if (ind < 0 || ind >= A.bounds[i])
return OVERFLOW;
*off += A.constants[i] * ind;
}
return OK;
}
Status Value(ElemType* e, Array A, ...)
{
//依次为各维的下标值,若各下标合法,则e被赋值为A的相应的元素值
va_list ap;
Status result;
int off;
va_start(ap, A);
if ((result = Locate(A, ap, &off)) == OVERFLOW) //调用Locate()
return result;
*e = *(A.base + off);
return OK;
}
Status Assign(Array* A, ElemType e, ...)
{
//依次为各维的下标值,若各下标合法,则将e的值赋给A的指定的元素
va_list ap;
Status result;
int off;
va_start(ap, e);
if ((result = Locate(*A, ap, &off)) == OVERFLOW) //调用Locate()
return result;
*((*A).base + off) = e;
return OK;
}
int main()
{
Array A;
int i, j, k, * p, dim = 3, bound1 = 3, bound2 = 4, bound3 = 2; //a[3][4][2]数组
ElemType e, * p1;
InitArray(A, dim, bound1, bound2, bound3); //构造3*4*2的3维数组A
p = A.bounds;
printf("A.bounds=");
for (i = 0; i < dim; i++) //顺序输出A.bounds
printf("%d ", *(p + i));
p = A.constants;
printf("\nA.constants=");
for (i = 0; i < dim; i++) //顺序输出A.constants
printf("%d ", *(p + i));
printf("\n%d页%d行%d列矩阵元素如下:\n", bound1, bound2, bound3);
printf("将 i*100+j*10+k赋值给A[i][j][k]:\n\n") ; //运行结果1
// printf("将(i * 4 * 2 + j * 2 + k) * 4赋值给A[i][j][k]:\n\n") ; //运行结果2
for (i = 0; i < bound1; i++)
{
for (j = 0; j < bound2; j++)
{
for (k = 0; k < bound3; k++)
{
Assign(&A, i * 100 + j * 10 + k, i, j, k); // 将i*100+j*10+k赋值给A[i][j][k]
// Assign(&A, (i * 4 * 2 + j * 2 + k) * 4, i, j, k); // 将(i * 4 * 2 + j * 2 + k) * 4赋值给A[i][j][k]
Value(&e, A, i, j, k); //将A[i][j][k]的值赋给e
printf("A[%d][%d][%d]=%2d ", i, j, k, e); //输出A[i][j][k]
}
printf("\n");
}
printf("\n");
}
p1 = A.base;
printf("A.base=\n");
for (i = 0; i < bound1 * bound2 * bound3; i++) //顺序输出A.base
{
printf("%4d", *(p1 + i));
if (i % (bound2 * bound3) == bound2 * bound3 - 1)
printf("\n");
}
DestroyArray(&A);
return 0;
}
运行结果1:
A.bounds=3 4 2
A.constants=8 2 1
3页4行2列矩阵元素如下:
将 i*100+j*10+k赋值给A[i][j][k]:
A[0][0][0]= 0 A[0][0][1]= 1
A[0][1][0]=10 A[0][1][1]=11
A[0][2][0]=20 A[0][2][1]=21
A[0][3][0]=30 A[0][3][1]=31
A[1][0][0]=100 A[1][0][1]=101
A[1][1][0]=110 A[1][1][1]=111
A[1][2][0]=120 A[1][2][1]=121
A[1][3][0]=130 A[1][3][1]=131
A[2][0][0]=200 A[2][0][1]=201
A[2][1][0]=210 A[2][1][1]=211
A[2][2][0]=220 A[2][2][1]=221
A[2][3][0]=230 A[2][3][1]=231
A.base=
0 1 10 11 20 21 30 31
100 101 110 111 120 121 130 131
200 201 210 211 220 221 230 231
运行结果2:
A.bounds=3 4 2
A.constants=8 2 1
3页4行2列矩阵元素如下:
将(i * 4 * 2 + j * 2 + k) * 4赋值给A[i][j][k]:
A[0][0][0]= 0 A[0][0][1]= 4
A[0][1][0]= 8 A[0][1][1]=12
A[0][2][0]=16 A[0][2][1]=20
A[0][3][0]=24 A[0][3][1]=28
A[1][0][0]=32 A[1][0][1]=36
A[1][1][0]=40 A[1][1][1]=44
A[1][2][0]=48 A[1][2][1]=52
A[1][3][0]=56 A[1][3][1]=60
A[2][0][0]=64 A[2][0][1]=68
A[2][1][0]=72 A[2][1][1]=76
A[2][2][0]=80 A[2][2][1]=84
A[2][3][0]=88 A[2][3][1]=92
A.base=
0 4 8 12 16 20 24 28
32 36 40 44 48 52 56 60
64 68 72 76 80 84 88 92
三、矩阵的压缩存储
矩阵定义:一个由 m×n 个元素排成的 m 行(横向) n 列(纵向)的表。
对于值相同的元素很多且呈某种规律分布、零元素多的矩阵,为了节省存储空间,可以对这类矩阵进行压缩存储。
矩阵的压缩存储:
- 为多个相同的非零元素只分配一个存储空间
- 对零元素不分配空间
下面我们将会介绍特殊矩阵和稀疏矩阵的压缩存储。
3.1、特殊矩阵
3.1.1、对称矩阵
在一个 n 阶方阵 A 中,若元素满足下述性质: (1 ≤ i , j ≤ n ), 则称 A 为对称矩阵。

对称矩阵上下三角中的元素数均 为: n(n + 1) / 2
因此可以行序为主序将元素存放在一 个 一维数组 sa[n(n+1)/2] 中:

那么 和 sa[k] 中,如何根据 i 和 j 确定其对应的数组下标 k 呢?

解释:
【1】对于下三角形的行序存储: 前的 i -1 行有 1+ 2 +…+ (i -1)= i(i -1)/2 个元素(求和),在 第 i 行上有 j 个元素。
【2】对于上三角形的列序存储: 前的 j -1 列有 1+ 2 +…+ (i -1)= j(j -1)/2 个元素(求和),在 第 j 列上有 i 个元素。
⚠️注意:对于上三角的列序存储和下三角的行序存储,采用的分析方式是相同的。
- 对于上三角的行序存储的数组下标 k:
- 对于下三角的列序存储的数组下标 k:
因为,所以只要交换关系式中的 i 和 j 即可。
例题:
根据上面的公式,将 i = 6 , j = 7 代入得a67对于的下标k为:
[(6-1)* (2 * 8 - (6 - 2))] / 2 + (7 - 6) == 31
所以a67的地址为:1000 + 31 * 3 = 1093
当然这题的数据给的比较小,也可以不用公式:
这个元素在上三角部分中,是第6行中第2个元素,而这个元素的前面应该存储了31个元素(8+7+6+5+4+1=31),又由于每个矩阵元素占3个单元,所以矩阵元素a67的地址为1000+31×3=1093。

3.1.2、三角矩阵
以主对角线划分,三角矩阵有上(下)三角两种。 上(下)三角矩阵的下(上)三角(不含主对角线)中 的元素均为常数。在大多数情况下,三角矩阵常数为零。

三角矩阵的存储:除了存储主对角线及上(下)三 角中的元素外,再加一个存储常数 c 的空间。
3.1.3、对角矩阵(带状矩阵)

对角矩阵可按行优先顺序或对角线的顺序。都可将其压缩存储到一维数组中,且也能找到每个非零元素和向量下标的对应关系。
当然对于按对角线存储我们也可以采用一个二维数组来存,这也许比用一维数组顺序存储方便一点:

对于前者占用空间为:6 * 6 = 36,压缩后的空间占:5 * 6 = 30 ,虽然压缩的空间不是很多,但是当对角矩阵很大时,其压缩效果就比较显著了。
3.2、稀疏矩阵(超详细)
稀疏矩阵:设在 m×n 的矩阵中有 t 个非零元素。 令 = t / (m × n) ,当
≤0.05 时称为稀疏矩阵。

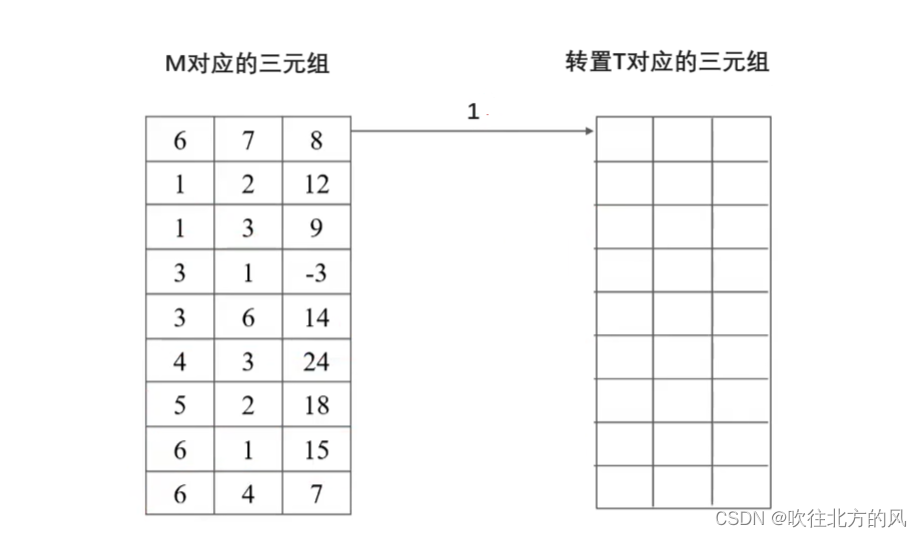
压缩存储原则:存各非零元的值、行列位置和矩阵的行列数。
三元组 惟一确定矩阵的 一个非零元,因此:
M 可以由 {(1,2,12), (1,3,9), (3,1,-3), (3,6,14), (4,3,24), (5,2,18), (6,1,15), (6,4,-7) } 和矩阵维数 (6, 7) 唯一确定。
⚠️通常,为了可靠描述,还会加一个总行数、总列数、非零元素总个数。
稀疏矩阵的压缩存储方法——顺序存储结构

#define MAXSIZE 12500 //假设非零元个数的最大值
typedef struct {
int i, j; //该非零元的行列下标
Elemtype e;
}Triple;
typedef struct {
Triple data[MAXSIZE + 1];
int mu, nu, tu; //矩阵的总行、总列数和总非零元个数
}TSMatrix;
扩展:已知一个稀疏矩阵的三元组表,求该矩阵转置矩阵的三元组表。
转置矩阵:一个 m×n 的矩阵 M,它的转置 T 是一个 n×m 的矩阵,且 T (i, j) = M[ j, i],1≤i≤n,1≤j≤m, 即 M 的行是 T 的列,M 的列是 T 的行。
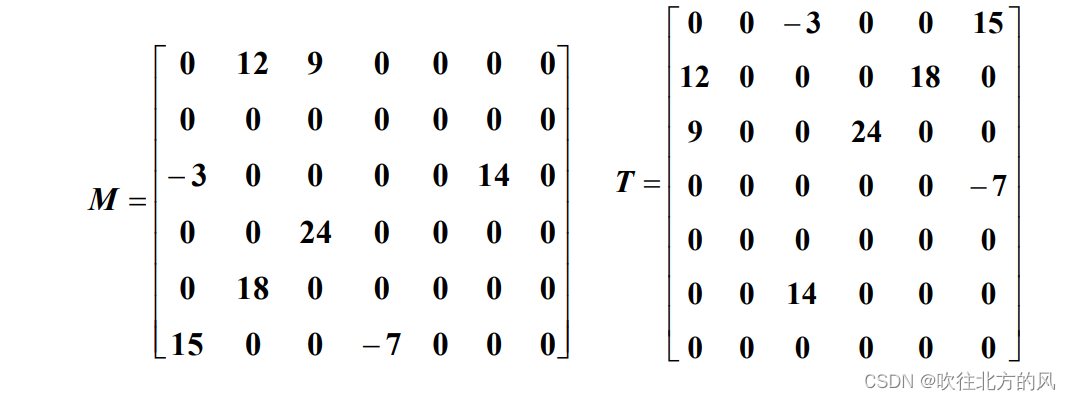
法一:

代码实现:

Status TransposeSMatrix(TSMatrix M, TSMatrix &T) {
T.mu=M.nu; T.nu=M.mu; T.tu=M.tu;
int q = 1;
if (T.tu)
{
for (int col = 1; col <= M.nu; ++ col) //nu是M的列
{
for (int p = 1; p <= M.tu; ++ p) { //tu是M对应的三元组非零元总数
if ( M.data[p].j == col ) {
T.data[q].i = M.data[p].j ;
T.data[q].j = M.data[p].i ;
T.data[q].e = M.data[p].e ;
q++;
}
}
}
}
return OK;
} // TransposeSMatrix 时间复杂度:O(nu * tu) ,若 tu 与mu * nu 同数量级, 则为:O(mu* )
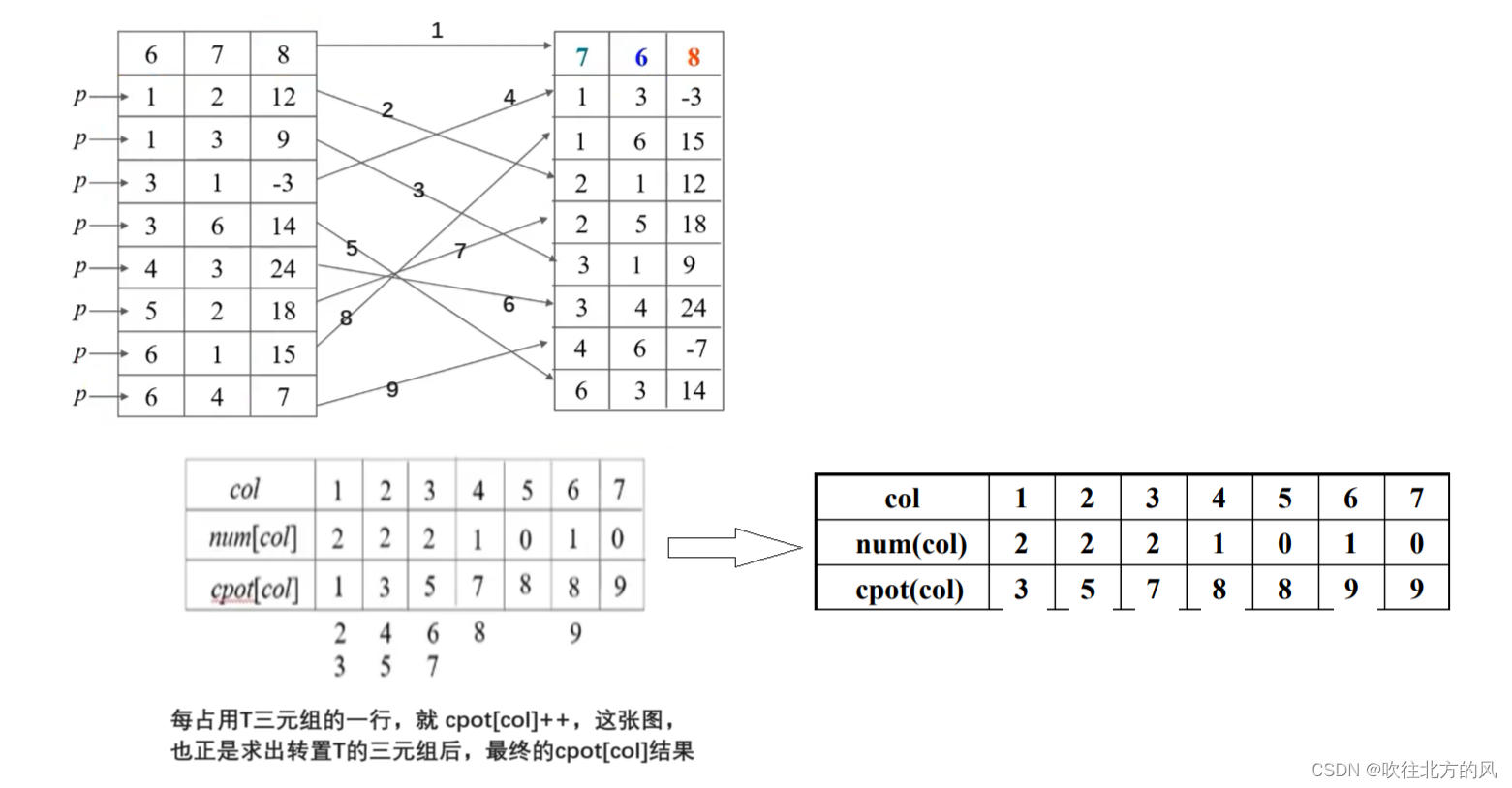
三元组的快速转置算法:
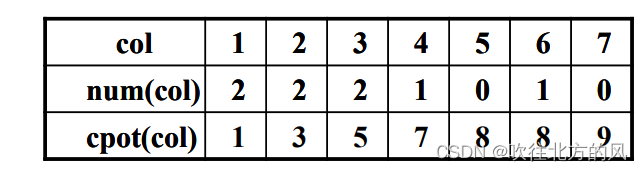
上面那张图,是实现三元组快速转置前 ,必须需要求得的数据,下面就分别介绍它们的求法:
【1】num[col]的由来:

【2】cpot[col] 的由来(借助num[col]):

理解了上面两个数组的求解,下面就开始如何通过 cpot[col] 数组,准确找到转置矩阵T的三元组的每一行应该存哪一个非零元数:

完整代码:
Status FastTransposeSMatrix( TSMatrix M, TSMatrix &T ,int num[] , int cpot[]) {
// 采用三元组顺序表存储表示,求稀疏矩阵 M 的转置矩阵 T
T.mu = M.nu; T.nu = M.mu; T.tu = M.tu;
if (T.tu) {
for (int col=1; col<=M.nu; ++col) num[col] = 0;
for (int t = 1; t <= M.tu ; ++t) ++num[M.data[t].j]; // 求 M 中各列非零元的个数
cpot[1] = 1;
for (int col = 2; col <= M.nu ; ++col) cpot[col] = cpot[col -1] + num[col -1]; // 求 M 中各列的第一个非零元在 T.data 中的序号
int col , q;
for (int p = 1 ; p <= M.tu ; ++p) { // 开始求 M的转置 T对应的三元组
col = M.data[p].j;
q = cpot[col];
T.data[q].i = M.data[p].j; T.data[q].j = M.data[p].i;
T.data[q].e = M.data[p].e;
cpot[col]++;
}
}
return OK;
} // FastTransposeSMatri上面代码时间复杂度:O(nu + tu) ,若 tu 与 mu * nu 同数量级,则为:O(mu * nu)
优缺点:
三元组顺序表又称有序的双下标法。
三元组顺序表的优点:非零元在表中按行序有序存储, 因此便于进行依行顺序处理的矩阵运算。
三元组顺序表的缺点:不能随机存取。若按行号存取某一行中的非零元,则需从头开始进行查找。
3.3、十字链表(稀疏矩阵的链式存储结构)
正如三元组顺序表的缺点所在,我们可以用稀疏矩阵的链式存储结构来解决这个问题。
优点:它能够灵活地插入因运算而产生的新的非零元素, 删除因运算而产生的新的零元素,实现矩阵的运算。
在十字链表中,矩阵的每一个非零元素用一个结点表示,该结点除了(row,col,value)外,还有两个域:
- right: 用于链接同一行中的下一个非零元素;
- down:用以链接同一列中的下一个非零元素。
十字链表中结点的结构示意图:
 这里看两个稀疏矩阵的存储示意图,你大概就能明白他的大致结构了:
这里看两个稀疏矩阵的存储示意图,你大概就能明白他的大致结构了:
【1】
【2】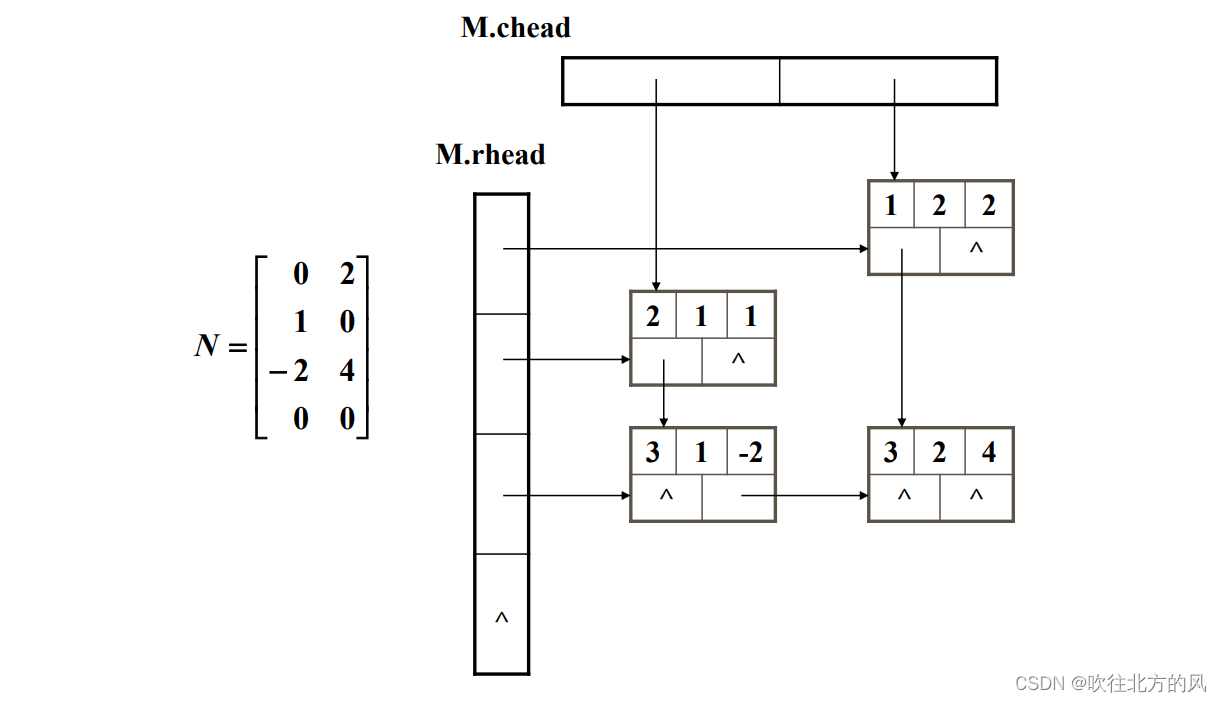
十字链表的结构类型说明如下:
typedef struct OLNode
{
int i, j; // 非零元素的行和列下标
ElemType e;
struct OLNode * right, *down; // 非零元素所在行表、列表的后继链域
} OLNode; *OLink;
typedef struct
{
OLink * rhead , *chead; //行、列链表的头指针向量基址,注意这里是指针数组(即OLNode结构的结点的指针的指针)
int mu, nu, tu; //稀疏矩阵的行数、列数、非零元个数
} CrossList;这里的结构和上一章讲【数据结构复习之路】栈和队列(本站最全最详细讲解)& 严蔚敏版-CSDN博客
里面的队列的链式存储是非常相似的,只是这里的每一行、每一列都是可以看成一个链队列。
下面给出可运行的完整代码(三元组转十字链表),希望能帮助你理解:
#include<stdio.h>
#include<stdlib.h>
typedef struct OLNode
{
int i, j, e; //矩阵三元组i代表行 j代表列 e代表当前位置的数据
struct OLNode* right, * down; //指针域 右指针 下指针
}OLNode, * OLink;
typedef struct
{
OLink* rhead, * chead; //行和列链表头指针
int mu, nu, tu; //矩阵的行数,列数和非零元的个数
}CrossList;
void CreateMatrix_OL(CrossList* M);
void display(CrossList M);
int main()
{
CrossList M;
M.rhead = NULL;
M.chead = NULL;
CreateMatrix_OL(&M);
printf("输出矩阵M:\n");
display(M);
return 0;
}
void CreateMatrix_OL(CrossList* M)
{
int m, n, t;
int num = 0;
int i, j, e;
OLNode* p = NULL, * q = NULL;
printf("输入矩阵的行数、列数和非0元素个数:");
scanf("%d%d%d", &m, &n, &t);
(*M).mu = m;
(*M).nu = n;
(*M).tu = t;
if (!((*M).rhead = (OLink*)malloc((m + 1) * sizeof(OLink))) || !((*M).chead = (OLink*)malloc((n + 1) * sizeof(OLink))))
{
printf("初始化矩阵失败");
exit(0);
}
for (i = 0; i <= m; i++)
{
(*M).rhead[i] = NULL;
}
for (j = 0; j <= n; j++)
{
(*M).chead[j] = NULL;
}
while (num < t) {
scanf("%d%d%d", &i, &j, &e);
num++;
if (!(p = (OLNode*)malloc(sizeof(OLNode))))
{
printf("初始化三元组失败");
exit(0);
}
p->i = i;
p->j = j;
p->e = e;
//链接到行的指定位置
//如果第 i 行没有非 0 元素,或者第 i 行首个非 0 元素位于当前元素的右侧,直接将该元素放置到第 i 行的开头
if (NULL == (*M).rhead[i] || (*M).rhead[i]->j > j)
{
p->right = (*M).rhead[i];
(*M).rhead[i] = p;
}
else
{
//找到当前元素的位置
for (q = (*M).rhead[i]; (q->right) && q->right->j < j; q = q->right);
//将新非 0 元素插入 q 之后
p->right = q->right;
q->right = p;
}
//链接到列的指定位置
//如果第 j 列没有非 0 元素,或者第 j 列首个非 0 元素位于当前元素的下方,直接将该元素放置到第 j 列的开头
if (NULL == (*M).chead[j] || (*M).chead[j]->i > i)
{
p->down = (*M).chead[j];
(*M).chead[j] = p;
}
else
{
//找到当前元素要插入的位置
for (q = (*M).chead[j]; (q->down) && q->down->i < i; q = q->down);
//将当前元素插入到 q 指针下方
p->down = q->down;
q->down = p;
}
}
}
void display(CrossList M) {
int i,j;
//一行一行的输出
for (i = 1; i <= M.mu; i++) {
//如果当前行没有非 0 元素,直接输出 0
if (NULL == M.rhead[i]) {
for (j = 1; j <= M.nu; j++) {
printf("0 ");
}
putchar('\n');
}
else
{
int n = 1;
OLink p = M.rhead[i];
//依次输出每一列的元素
while (n <= M.nu) {
if (!p || (n < p->j) ) {
printf("0 ");
}
else
{
printf("%d ", p->e);
p = p->right;
}
n++;
}
putchar('\n');
}
}
}输出结果:
输入矩阵的行数、列数和非0元素个数:3 4 4
1 1 3
1 4 5
2 2 -1
3 1 2
输出矩阵M:
3 0 0 5
0 -1 0 0
2 0 0 0四、广义表的定义
广义表(又称列表 Lists)是 n≥0个元素 a1 , a2 , …, an 的有限序列,其中每一个ai 或者是原子(单个元素),或者是一个子表。
广义表通常记作: LS = (a1,a2,…,an )
其中: LS 为表名, n 为表的长度, 每一个 ai 为表的元素。 习惯上,一般用大写字母表示广义表,小写字母表示原子。
- 表头:若 LS 非空 (n≥1 ),则其第一个元素 a1 就是表头。 记作 head(LS) = a1。
- 注:表头可是原子,也可是子表。
- 表尾:除表头之外的其它元素组成的表。 记作 tail(LS) = (a2 , ..., an )。
- 注:表尾不是最后一个元素,而是一个子表。
【例题】
- A=( ) :空表,长度为 0
- B=(( )) :长度为 1,表头、表尾均为 ( )
- C=(a, (b, c)) :长度为 2,由原子 a 和子表 (b, c) 构成,表头为 a ;表尾为 ((b, c))
- D=(x,y,z):长度为 3,每一项都是原子, 表头为 x ;表尾为 (y, z)
- E=(C, D):长度为 2,每一项都是子表。 表头为 C ;表尾为 (D)
- F=(a, F):长度为 2,第一项为原子,第二项为它本身(F),表头为 a ;表尾为 (F)
4.1、广义表的性质
【1】 广义表中的数据元素有相对次序(一个直接前驱和一个直接后继【除了表头和表尾】)
【2】 广义表的长度定义为最外层所包含元素的个数; 如: C=(a, (b, c)) 是长度为 2 的广义表。
【3】 广义表的深度定义为该广义表展开后所含括号的重数。e.g: A = (b, c) 的深度为 1,B = (A, d) 的深度为 2, C = (f, B, h) 的深度为 3。
⚠️注意:“原子”的深度为 0 ; “空表”的深度为 1 。
【4】 广义表可以为其他广义表共享;如:广义表 B 就共享 表 A。在 B 中不必列出 A 的值,而是通过名称来引用。
【5】 广义表可以是递归的表。如:F=(a, F)=(a, (a, (a, …))) ,注意:递归表的深度是无穷值,长度是有限值。
【6】 广义表是多层次结构,广义表的元素可以是单元素, 也可以是子表,而子表的元素还可以是子表,…。 可以用图形象地表示。

广义表可看成是线性表的推广,线性表是广义表的特例。
广义表的结构相当灵活,在某种前提下,它可以兼容线性表、数组、树和有向图等各种常用的数据结构。
当二维数组的每行(或每列)作为子表处理时,二维数组即为一个广义表。
另外,树和有向图也可以用广义表来表示。 由于广义表不仅集中了线性表、数组、树和有向图等常 见数据结构的特点,而且可有效地利用存储空间,因此在计算机的许多应用领域都有成功使用广义表的实例
广义表基本运算:
取表头运算 GetHead 和 取表尾运算 GetTail
若广义表 LS=(a1 , a2 , …, an ), 则 GetHead(LS) = a1 , GetTail(LS) = (a2 , …, an )。
⚠️注意:取表头得到的结果可以是原子,也可以是一个子表。 取表尾得到的结果一定是一个子表。
e.g: D = ( E, F ) = ((a, (b, c)),F )
- GetHead( D ) = E ,GetTail( D ) = ( F )
- GetHead( E ) = a ,GetTail( E ) = ((b, c))
- GetHead(((b, c))) = (b, c) ,GetTail(((b, c))) = ( )
- GetHead((b, c)) = b ,GetTail((b, c)) = (c)
- GetHead((c)) = c ,GetTail((c)) = ( )
4.2、广义表的存储结构
由于广义表中既可存储原子(不可再分的数据元素),也可以存储子表,因此很难使用顺序存储结构表示,通常情况下广义表结构采用链表实现。
比如D = (a , ((b , c) , d) ) ,如果采用顺序存储,就需要一个三维数组,这是非常浪费存储空间的!
4.2.1、链表表示(法1)
法1也叫:头尾链表存储

typedef struct GLNode {
int tag;//标志域,用于区分元素结点和表结点
union { //元素结点和表结点的联合部分
char atom;//atom是原子结点的值域
struct {
struct GLNode* hp, * tp;
}ptr;//ptr是表结点的指针域,hp指向表头;tp指向表尾
}un;
}GLNode, * Glist;这里用到了 union 共用体,因为同一时间此节点不是原子节点就是子表节点,当表示原子节点时,就使用 atom 变量;反之则使用 ptr 结构体。
这里我用法1链表存储该广义表,并画出了图,你能看出哪些特点呢?
【1】

【2】
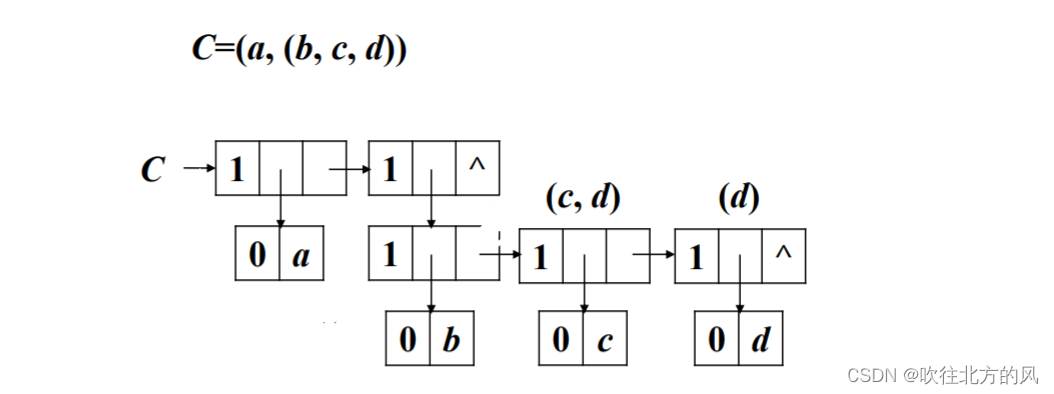
【3】

【4】

【总结】
- 从图【2】可以看到,存储原子 a、b、c、d 时都是用子表包裹着表示的,因为原子 a 和子表 (b,c,d) 在广义表中同属一级,而原子 b、c、d 也同属一级。
- 就如A,除非A是一个空表,指针A的值为 NULL,否则指针A的指向的一定是 tag 值为 1 的子表结点。
- 采用首尾表示法容易分清列表中原子或子表所在的层次
- 最高层的表结点的个数即为广义表的长度
这里给出这种结构,求广义表长度的完整代码:
假设 C = (a , ( b , c , d ))
#include <stdio.h>
#include <stdlib.h>
typedef struct GLNode{
int tag;//标志域
union{
char atom;//原子结点的值域
struct{
struct GLNode * hp,*tp;
}ptr;//子表结点的指针域,hp指向表头;tp指向表尾
};
}*Glist;
Glist creatGlist(Glist C){
//广义表C
C=(Glist)malloc(sizeof(Glist));
C->tag=1;
//表头原子‘a’
C->ptr.hp=(Glist)malloc(sizeof(Glist));
C->ptr.hp->tag=0;
C->ptr.hp->atom='a';
//表尾子表(b,c,d),是一个整体
C->ptr.tp=(Glist)malloc(sizeof(Glist));
C->ptr.tp->tag=1;
C->ptr.tp->ptr.hp=(Glist)malloc(sizeof(Glist));
C->ptr.tp->ptr.tp=NULL;
//开始存放下一个数据元素(b,c,d),表头为‘b’,表尾为(c,d)
C->ptr.tp->ptr.hp->tag=1;
C->ptr.tp->ptr.hp->ptr.hp=(Glist)malloc(sizeof(Glist));
C->ptr.tp->ptr.hp->ptr.hp->tag=0;
C->ptr.tp->ptr.hp->ptr.hp->atom='b';
C->ptr.tp->ptr.hp->ptr.tp=(Glist)malloc(sizeof(Glist));
//存放子表(c,d),表头为c,表尾为d
C->ptr.tp->ptr.hp->ptr.tp->tag=1;
C->ptr.tp->ptr.hp->ptr.tp->ptr.hp=(Glist)malloc(sizeof(Glist));
C->ptr.tp->ptr.hp->ptr.tp->ptr.hp->tag=0;
C->ptr.tp->ptr.hp->ptr.tp->ptr.hp->atom='c';
C->ptr.tp->ptr.hp->ptr.tp->ptr.tp=(Glist)malloc(sizeof(Glist));
//存放表尾d
C->ptr.tp->ptr.hp->ptr.tp->ptr.tp->tag=1;
C->ptr.tp->ptr.hp->ptr.tp->ptr.tp->ptr.hp=(Glist)malloc(sizeof(Glist));
C->ptr.tp->ptr.hp->ptr.tp->ptr.tp->ptr.hp->tag=0;
C->ptr.tp->ptr.hp->ptr.tp->ptr.tp->ptr.hp->atom='d';
C->ptr.tp->ptr.hp->ptr.tp->ptr.tp->ptr.tp=NULL;
return C;
}
int GlistLength(Glist C){
int Number=0;
Glist P=C;
while(P){
Number++;
P=P->ptr.tp;
}
return Number;
}
int main(){
Glist C = creatGlist(C);
printf("广义表的长度为:%d",GlistLength(C));
return 0;
}输出结果为:
广义表的长度为:24.2.2、链表表示(法2)
法2也叫:扩展线性链表存储(孩子兄弟链表)

typedef struct GLNode {
int tag;// 标志域,用于区分元素结点和表结点
union { // 元素结点和表结点的联合部分
char atom;//原子结点的值域
struct GLNode* hp;//表结点的表头指针
}un;
struct GLNode* tp;//这里的tp相当于链表的next指针,用于指向下一个数据元素
}GLNode, * GList;这里我用法2链表存储该广义表,并画出了图,你能看出哪些特点呢?
【1】

【2】 
【3】 
【4】

【总结】
- 无论 A 是否为空表,指针 A 指向的都是一个 tag 值为 1 的子表结点。当 A 为空表时,指针 A 所指结点的 hp 和 tp 指针都为 NULL。
- 最高层结点 tp 域必为 NULL
- 表达式中的左括号 “( ” 对应存储表示中的 tag = 1 的结点。
- 就如【图2】,由于其最顶层(蓝色标注)表示的此广义表,而第二层(红色标注)表示的才是该广义表中包含的数据元素,因此可以通过计算第二层中包含的节点数量,才可求得广义表的长度。
![]() 选择一个自己更擅长的结构就行了,我更倾向于法1的存储结构。
选择一个自己更擅长的结构就行了,我更倾向于法1的存储结构。
4.3、广义表的深度递归算法
思路:
- 依次遍历广义表 C 的每个节点,若当前节点为原子(tag 值为 0),则返回 0;若为空表,则返回 1;反之,则继续遍历该子表中的数据元素。
- 设置一个初始值为 0 的整形变量 max,每次递归过程返回时,令 max 与返回值进行比较,并取较大值。这样,当整个广义表递归结束时,max+1 就是广义表的深度。
- 其实,每次递归返回的值都是当前所在的子表的深度,原子默认深度为 0,空表默认深度为 1。
基于法1的存储结构:
#include <stdio.h>
#include <stdlib.h>
typedef struct GLNode{
int tag;//标志域
union{
char atom;//原子结点的值域
struct{
struct GLNode * hp,*tp;
}ptr;//子表结点的指针域,hp指向表头;tp指向表尾
};
}*Glist,GNode;
Glist creatGlist(Glist C){
//广义表C
C=(Glist)malloc(sizeof(GNode));
C->tag=1;
//表头原子‘a’
C->ptr.hp=(Glist)malloc(sizeof(GNode));
C->ptr.hp->tag=0;
C->ptr.hp->atom='a';
//表尾子表(b,c,d),是一个整体
C->ptr.tp=(Glist)malloc(sizeof(GNode));
C->ptr.tp->tag=1;
C->ptr.tp->ptr.hp=(Glist)malloc(sizeof(GNode));
C->ptr.tp->ptr.tp=NULL;
//开始存放下一个数据元素(b,c,d),表头为‘b’,表尾为(c,d)
C->ptr.tp->ptr.hp->tag=1;
C->ptr.tp->ptr.hp->ptr.hp=(Glist)malloc(sizeof(GNode));
C->ptr.tp->ptr.hp->ptr.hp->tag=0;
C->ptr.tp->ptr.hp->ptr.hp->atom='b';
C->ptr.tp->ptr.hp->ptr.tp=(Glist)malloc(sizeof(GNode));
//存放子表(c,d),表头为c,表尾为d
C->ptr.tp->ptr.hp->ptr.tp->tag=1;
C->ptr.tp->ptr.hp->ptr.tp->ptr.hp=(Glist)malloc(sizeof(GNode));
C->ptr.tp->ptr.hp->ptr.tp->ptr.hp->tag=0;
C->ptr.tp->ptr.hp->ptr.tp->ptr.hp->atom='c';
C->ptr.tp->ptr.hp->ptr.tp->ptr.tp=(Glist)malloc(sizeof(GNode));
//存放表尾d
C->ptr.tp->ptr.hp->ptr.tp->ptr.tp->tag=1;
C->ptr.tp->ptr.hp->ptr.tp->ptr.tp->ptr.hp=(Glist)malloc(sizeof(GNode));
C->ptr.tp->ptr.hp->ptr.tp->ptr.tp->ptr.hp->tag=0;
C->ptr.tp->ptr.hp->ptr.tp->ptr.tp->ptr.hp->atom='d';
C->ptr.tp->ptr.hp->ptr.tp->ptr.tp->ptr.tp=NULL;
return C;
}
int GlistDepth(Glist C){
//如果表C为空表时,直接返回长度1;
if (!C) {
return 1;
}
//如果表C为原子时,直接返回0;
if (C->tag==0) {
return 0;
}
int max=0;//设置表C的初始长度为0;
for (Glist pp=C; pp; pp=pp->ptr.tp) {
int dep=GlistDepth(pp->ptr.hp); //求以 pp -> ptr.hp为头指针的子表深度
if (dep>max) {
max=dep;//每次找到表中遍历到深度最大的表,并用max记录
}
}
//程序运行至此处,表明广义表不是空表,由于原子返回的是0,而实际长度是1,所以,此处要+1;
return max+1;
}
int main(int argc, const char * argv[]) {
Glist C=creatGlist(C);
printf("广义表的深度为:%d",GlistDepth(C));
return 0;
}输出结果为:
广义表的深度为:2结尾
最后,非常感谢大家的阅读。我接下来还会更新 树和二叉树 ,如果本文有错误或者不足的地方请在评论区(或者私信)留言,一定尽量满足大家,如果对大家有帮助,还望三连一下啦!
Reference
【1】严蔚敏、吴伟民:《数据结构(C语言版)》