前提:熟悉两距离局部最优迷宫算法的原理、物理机器人的配置、物理机器人通过机器人驱动器来控制运动。
首先,编写Web 2D中实现两距离局部最优迷宫算法程序
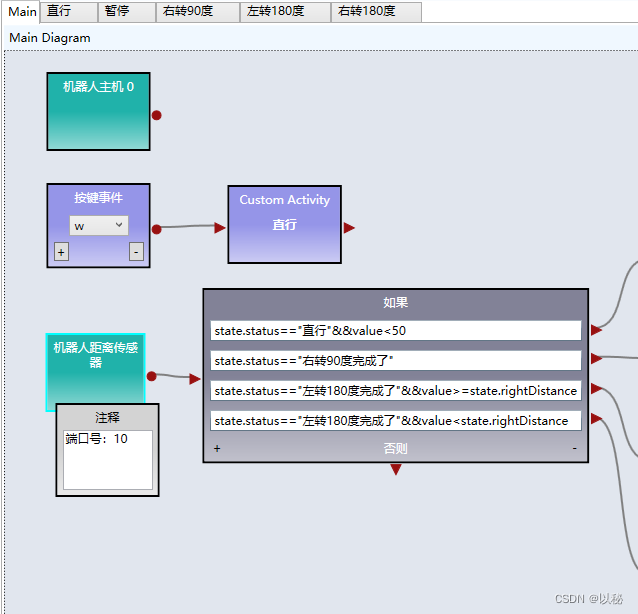
再对程序作如下修改即可:
1、修改主机配置(模拟器配置改为物理机器人配置)

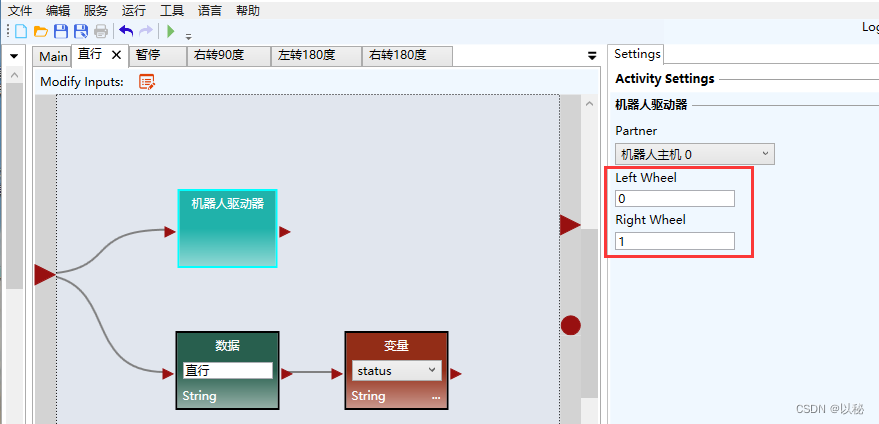
2、程序中所有的驱动器的端口号全部修改为左轮为0,右轮为1
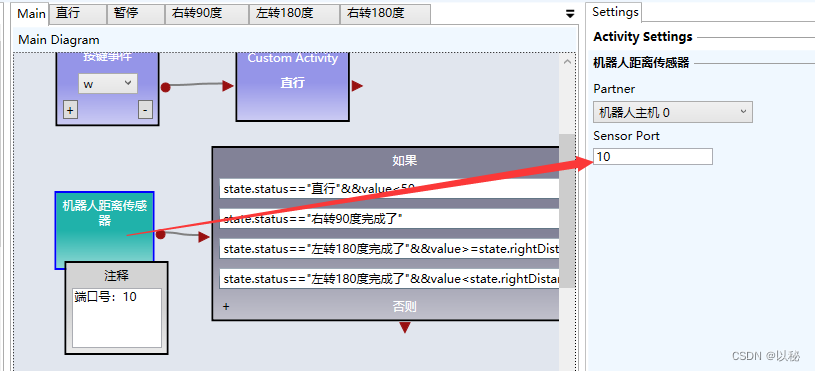
3、距离传感器的端口号配置为10(因为放置在前方)
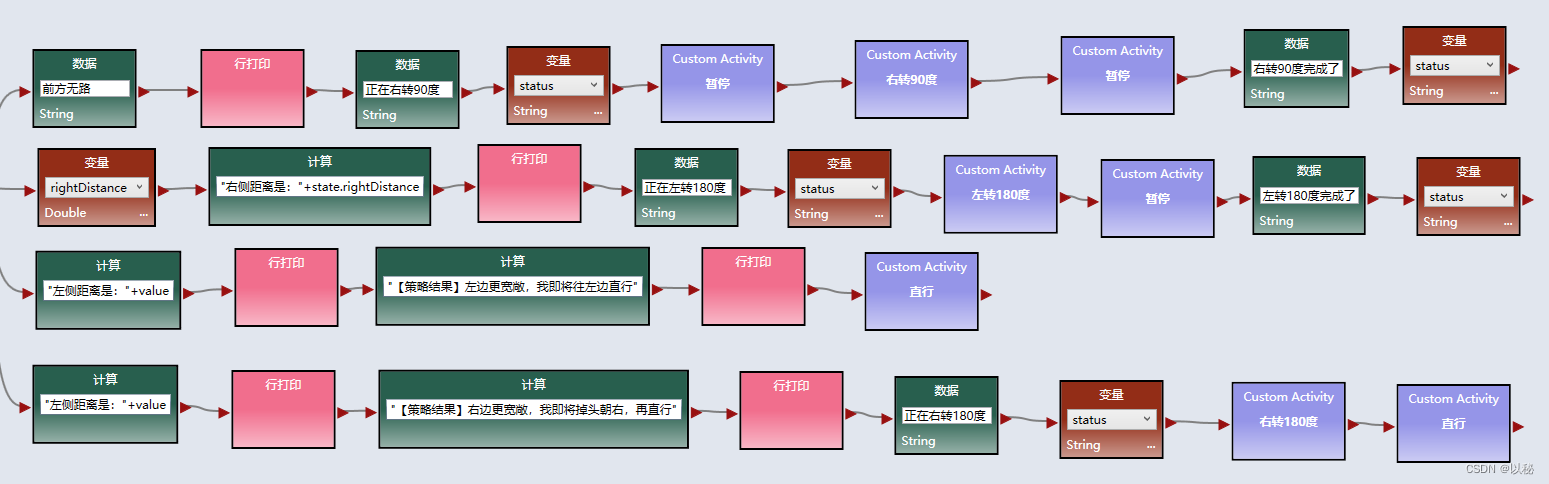
4、搭建迷宫,调整参数,直到运行结果能直观看到:前方无路了,有停止动作,再右转90度,再进行测量,程序中可以看到打印右侧测距结果,然后再左转180度,再停下来,再进行测量,程序中看到打印左侧测距结果,然后再选择往宽敞的那一边运行,即为比较好的运行结果。
参考运行结果:
点击查看结果