有时已经知道机械臂目标位姿的各关节信息,对于这种情况,我们用moveit可以很简单的将机械臂移动到目标位姿。
本篇主要是参考《ROS by example (volume 2)》里的实例,在pi_robot代码的基础上修改。
还有一些资料:http://www.360doc.com/content/16/0825/16/7821691_585865831.shtml
一、配置moveit关节控制器
ArbotiX的包提供了一个JTAC(Joint Trajectory Action Controller),它一方面直接控制伺服电机,另一方面使用Ros中的FollowJointTrajectoryAction去接收程序发过来的joint轨迹目标。
所以:需要做的有2点:
(1)配置一个底层硬件实际用到的JTAC。 这个JTAC会负责接收FollowJointTrajectoryAction内容。
(2)配置一个moveit!插件,这个插件负责将JTAC与moveit!之间的通信抽象化。 这个插件叫moveit_simple_controller_manager,它可以配合FollowJointTrajectoryAction工作。
需要我们自己做的事情就是配置参数将它们联系起来(topic和actions的名字)
1、创建controllers.yaml文件
这个文件放置在moveit配置文件的config目录下,我们用来测试的机械臂没有抓取的手爪,只用到了right_arm_controller这个控制器。
2、创建控制器管理器启动文件robot_arm_moveit_controller_manager.launch.xml
二、关节空间的正运动学规划
1、用arbotix关节控制器启动虚拟机械臂模型
文件代码内容如下:(我是在教材例子中进行修改的,与机械臂控制无关的部分,比如right_gripper_controller,已经被注释掉了)
大致内容是;
(1)加载urdf模型
(2)启动arbotix,包括上面我们提到的配置的一些控制器
(3)启动tf节点,这里是我参考其他的文件时加上的。我在调试时,没有这个tf节点,规划过程中可以plan()出规划结果,但是excute()失败,加上之后就可以了,具体原因还不清楚,找到后,我会再补充。目前猜测可能是odom坐标系与机械臂的base_link之间缺少tf关系。
(4)启动robot_state_publisher
2、启动move_group
这个move_group.launch在moveit配置文件的launch目录下,文件启动的节点和服务都是moveit用来和机械臂交互的
3、启动rviz
my_moveit.rivz文件我保存在百度网盘链接:https://pan.baidu.com/s/1qY0vwZE 密码:astj
执行结果

4、运行运动学求解的脚本
moveit_fk_demo_my.py脚本内容如下,同样,我是在教材实例的脚本文件修改的,其中注释掉了与机械臂控制无关的内容,加了一些输出调试状态的信息代码(如rospy.loginfo("1111 execute traj_1 completed 1111 ") )
1、观察topic之间的联系信息
效果如下

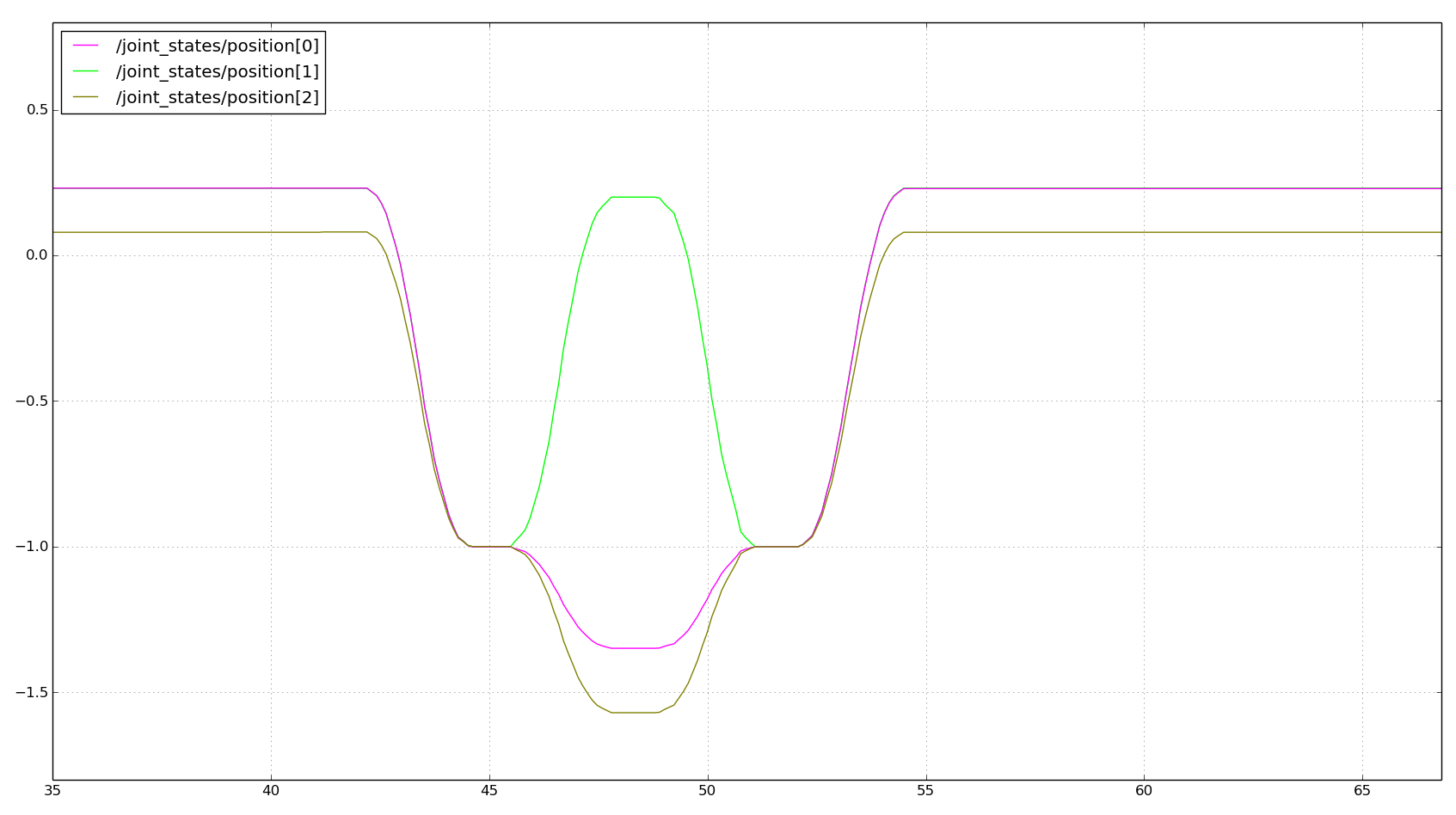
2、观察joint_states话题中包含的position和velocity信息
xs@xs-PC:~$ rosrun rqt_plot rqt_plot
将postion【0】、postion【1】、postion【2】,velocity【0】、velocity【1】、velocity【2】加载上去,
效果如下

我们启动(做机械臂导航时遇到的问题5:如何使用ROS内嵌serial功能包实现串口通信)中的my_serial_node节点,来像串口助手发送状态信息
串口助手接收到信息如下:完成数据接收。

本篇主要是参考《ROS by example (volume 2)》里的实例,在pi_robot代码的基础上修改。
还有一些资料:http://www.360doc.com/content/16/0825/16/7821691_585865831.shtml
一、配置moveit关节控制器
ArbotiX的包提供了一个JTAC(Joint Trajectory Action Controller),它一方面直接控制伺服电机,另一方面使用Ros中的FollowJointTrajectoryAction去接收程序发过来的joint轨迹目标。
所以:需要做的有2点:
(1)配置一个底层硬件实际用到的JTAC。 这个JTAC会负责接收FollowJointTrajectoryAction内容。
(2)配置一个moveit!插件,这个插件负责将JTAC与moveit!之间的通信抽象化。 这个插件叫moveit_simple_controller_manager,它可以配合FollowJointTrajectoryAction工作。
需要我们自己做的事情就是配置参数将它们联系起来(topic和actions的名字)
1、创建controllers.yaml文件
controller_list:
- name: right_arm_controller
action_ns: follow_joint_trajectory
type: FollowJointTrajectory
default: true
joints:
- joint_1
- joint_2
- joint_3
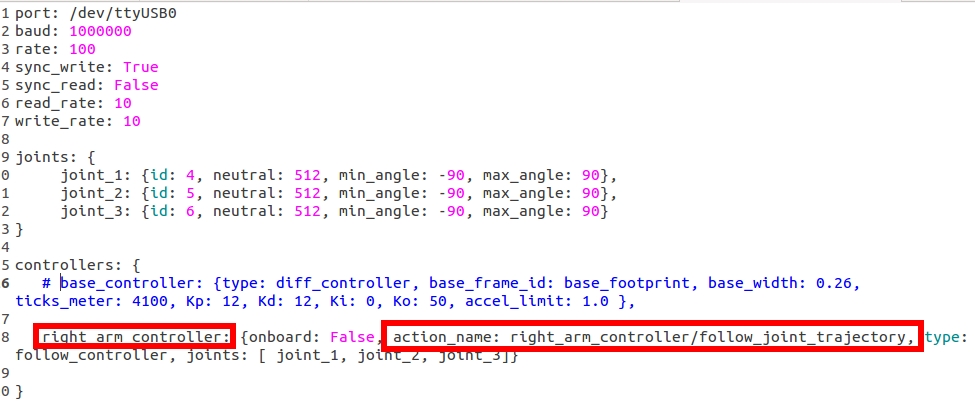
这个文件放置在moveit配置文件的config目录下,我们用来测试的机械臂没有抓取的手爪,只用到了right_arm_controller这个控制器。
注意:这个right_arm_controller控制器命名可以修改,但是与当初我们测试arbotix时的配置文件有关。我们当初学习arbotix节点控制伺服电机时,为arbotix配置了文件,名为:my_robot_arbotix.yaml,在里面我们命名了一些控制器controller,这里的controller命名、action_name必须要与moveit配置里的controllers.yaml文件中设置的action_ns相匹配。
2、创建控制器管理器启动文件robot_arm_moveit_controller_manager.launch.xml
这个文件放置在moveit配置文件的launch目录下,他会读取我们的controllers.yaml中设置好的控制器参数。
<launch> <!-- Set the param that trajectory_execution_manager needs to find the controller plugin --> <arg name="moveit_controller_manager" default="moveit_simple_controller_manager/MoveItSimpleControllerManager" /> <param name="moveit_controller_manager" value="$(arg moveit_controller_manager)"/> <!-- load controller_list --> <arg name="use_controller_manager" default="true" /> <!-- Load joint controller configurations from YAML file to parameter server --> <rosparam file="$(find arm_moveit_config)/config/controllers.yaml"/> </launch>
二、关节空间的正运动学规划
1、用arbotix关节控制器启动虚拟机械臂模型
xs@xs-PC:~/catkin_ws2/src/mybot_description/launch$ roslaunch my_robot_arbotix_ok.launch
文件代码内容如下:(我是在教材例子中进行修改的,与机械臂控制无关的部分,比如right_gripper_controller,已经被注释掉了)
大致内容是;
(1)加载urdf模型
(2)启动arbotix,包括上面我们提到的配置的一些控制器
(3)启动tf节点,这里是我参考其他的文件时加上的。我在调试时,没有这个tf节点,规划过程中可以plan()出规划结果,但是excute()失败,加上之后就可以了,具体原因还不清楚,找到后,我会再补充。目前猜测可能是odom坐标系与机械臂的base_link之间缺少tf关系。
(4)启动robot_state_publisher
<launch>
<!-- Make sure we are not using simulated time -->
<param name="/use_sim_time" value="false" />
<!-- Launch the arbotix driver in fake mode by default -->
<arg name="sim" default="true" />
<!-- If using a real controller, look on /dev/ttyUSB0 by default -->
<arg name="port" default="/dev/ttyUSB0" />
<!-- Load the URDF/Xacro model of our robot -->
<param name="robot_description" textfile="/home/xs/catkin_ws2/src/mybot_description/urdf/robot_arm.urdf" />
<!-- Bring up the arbotix driver with a configuration file appropriate to the robot -->
<node name="arbotix" pkg="arbotix_python" type="arbotix_driver" clear_params="true" output="screen">
<rosparam file="/home/xs/catkin_ws2/src/mybot_description/my_robot_arbotix.yaml" command="load" />
<param name="sim" value="$(arg sim)" />
<param name="port" value="$(arg port)" />
</node>
<!--
Run a separate controller for the one sided gripper
<node name="right_gripper_controller" pkg="arbotix_controllers" type="gripper_controller" output="screen">
<rosparam>
model: singlesided
invert: true
center: 0.0
pad_width: 0.004
finger_length: 0.065
min_opening: -0.8
max_opening: 0.5
joint: right_gripper_finger_joint
</rosparam>
</node>
-->
<!-- Load the URDF, SRDF and other .yaml configuration files on the param server -->
<include file="$(find arm_moveit_config)/launch/planning_context.launch">
<arg name="load_robot_description" value="true"/>
</include>
<!-- If needed, broadcast static tf for robot root -->
<node pkg="tf" type="static_transform_publisher" name="virtual_joint_broadcaster_0" args="0 0 0 0 0 0 odom base_link 100" />
<!-- We do not have a robot connected, so publish fake joint states >
<node name="joint_state_publisher" pkg="joint_state_publisher" type="joint_state_publisher">
<param name="/use_gui" value="false"/>
<rosparam param="/source_list">[/move_group/fake_controller_joint_states]</rosparam>
</node-->
<!-- Publish the robot state -->
<node name="robot_state_publisher" pkg="robot_state_publisher" type="state_publisher">
<param name="publish_frequency" type="double" value="20.0" />
</node>
<!--
<node
name="rviz"
pkg="rviz"
type="rviz"
args="-d /home/xs/catkin_ws2/src/robot_arm/my_moveit.rviz"
/>
-->
<!--
args="-d /home/xs/catkin_ws2/src/robot_arm/urdf.rviz"
args="-d /home/xs/catkin_ws2/src/robot_arm/arm_nav_my.rviz"
-->
<!-- Start all servos in a relaxed state -->
<node pkg="rbx2_dynamixels" type="arbotix_relax_all_servos.py" name="relax_all_servos" unless="$(arg sim)" />
<!-- Load diagnostics -->
<node pkg="diagnostic_aggregator" type="aggregator_node" name="diagnostic_aggregator" clear_params="true" unless="$(arg sim)">
<rosparam command="load" file="$(find rbx2_dynamixels)/config/dynamixel_diagnostics.yaml" />
</node>
<node pkg="rqt_robot_monitor" type="rqt_robot_monitor" name="rqt_robot_monitor" unless="$(arg sim)" />
</launch>
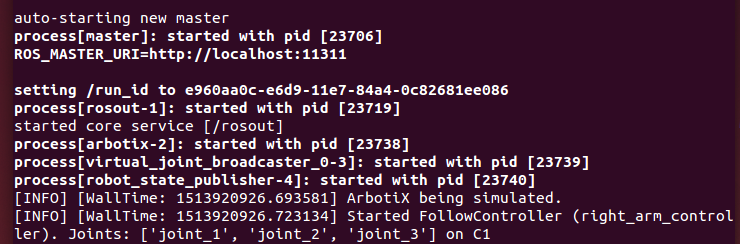
启动这个launch文件后,终端显示状态如下,可以看到高亮显示arbotix 、virtual_joint_broadcaster_0、 robot_state_publisher、 right_arm_controller已被启动。
2、启动move_group
xs@xs-PC:~/catkin_ws2/src/arm_moveit_config/launch$ roslaunch move_group.launch
这个move_group.launch在moveit配置文件的launch目录下,文件启动的节点和服务都是moveit用来和机械臂交互的
<launch>
<include file="$(find arm_moveit_config)/launch/planning_context.launch" />
<!-- GDB Debug Option -->
<arg name="debug" default="false" />
<arg unless="$(arg debug)" name="launch_prefix" value="" />
<arg if="$(arg debug)" name="launch_prefix"
value="gdb -x $(find arm_moveit_config)/launch/gdb_settings.gdb --ex run --args" />
<!-- Verbose Mode Option -->
<arg name="info" default="$(arg debug)" />
<arg unless="$(arg info)" name="command_args" value="" />
<arg if="$(arg info)" name="command_args" value="--debug" />
<!-- move_group settings -->
<arg name="allow_trajectory_execution" default="true"/>
<arg name="fake_execution" default="false"/>
<arg name="max_safe_path_cost" default="1"/>
<arg name="jiggle_fraction" default="0.05" />
<arg name="publish_monitored_planning_scene" default="true"/>
<!-- Planning Functionality -->
<include ns="move_group" file="$(find arm_moveit_config)/launch/planning_pipeline.launch.xml">
<arg name="pipeline" value="ompl" />
</include>
<!-- Trajectory Execution Functionality -->
<include ns="move_group" file="$(find arm_moveit_config)/launch/trajectory_execution.launch.xml" if="$(arg allow_trajectory_execution)">
<arg name="moveit_manage_controllers" value="true" />
<arg name="moveit_controller_manager" value="robot_arm" unless="$(arg fake_execution)"/>
<arg name="moveit_controller_manager" value="fake" if="$(arg fake_execution)"/>
</include>
<!-- Sensors Functionality -->
<include ns="move_group" file="$(find arm_moveit_config)/launch/sensor_manager.launch.xml" if="$(arg allow_trajectory_execution)">
<arg name="moveit_sensor_manager" value="robot_arm" />
</include>
<!-- Start the actual move_group node/action server -->
<node name="move_group" launch-prefix="$(arg launch_prefix)" pkg="moveit_ros_move_group" type="move_group" respawn="false" output="screen" args="$(arg command_args)">
<!-- Set the display variable, in case OpenGL code is used internally -->
<env name="DISPLAY" value="$(optenv DISPLAY :0)" />
<param name="allow_trajectory_execution" value="$(arg allow_trajectory_execution)"/>
<param name="max_safe_path_cost" value="$(arg max_safe_path_cost)"/>
<param name="jiggle_fraction" value="$(arg jiggle_fraction)" />
<!-- load these non-default MoveGroup capabilities -->
<!--
<param name="capabilities" value="
a_package/AwsomeMotionPlanningCapability
another_package/GraspPlanningPipeline
" />
-->
<!-- MoveGroup capabilities to load -->
<param name="capabilities" value="move_group/MoveGroupCartesianPathService
move_group/MoveGroupExecuteService
move_group/MoveGroupKinematicsService
move_group/MoveGroupMoveAction
move_group/MoveGroupPickPlaceAction
move_group/MoveGroupPlanService
move_group/MoveGroupQueryPlannersService
move_group/MoveGroupStateValidationService
move_group/MoveGroupGetPlanningSceneService
move_group/ClearOctomapService
" />
<!-- inhibit these default MoveGroup capabilities -->
<!--
<param name="disable_capabilities" value="
move_group/MoveGroupKinematicsService
move_group/ClearOctomapService
" />
-->
<!-- Publish the planning scene of the physical robot so that rviz plugin can know actual robot -->
<param name="planning_scene_monitor/publish_planning_scene" value="$(arg publish_monitored_planning_scene)" />
<param name="planning_scene_monitor/publish_geometry_updates" value="$(arg publish_monitored_planning_scene)" />
<param name="planning_scene_monitor/publish_state_updates" value="$(arg publish_monitored_planning_scene)" />
<param name="planning_scene_monitor/publish_transforms_updates" value="$(arg publish_monitored_planning_scene)" />
</node>
</launch>
3、启动rviz
xs@xs-PC:~$ rosrun rviz rviz -d'rospack find robot_arm'/my_moveit.rivz
my_moveit.rivz文件我保存在百度网盘链接:https://pan.baidu.com/s/1qY0vwZE 密码:astj
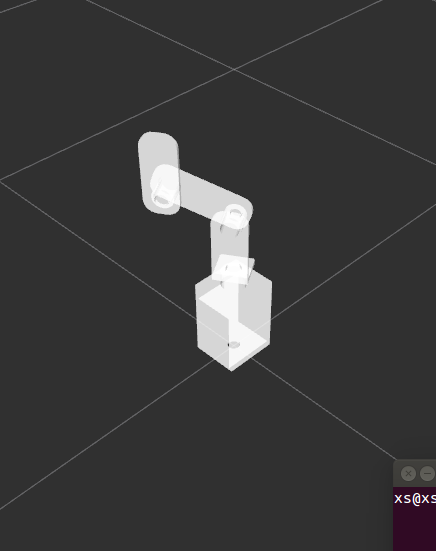
执行结果
4、运行运动学求解的脚本
xs@xs-PC:~$ rosrun rbx2_arm_nav moveit_fk_demo_my.py
moveit_fk_demo_my.py脚本内容如下,同样,我是在教材实例的脚本文件修改的,其中注释掉了与机械臂控制无关的内容,加了一些输出调试状态的信息代码(如rospy.loginfo("1111 execute traj_1 completed 1111 ") )
#!/usr/bin/env python
"""
moveit_fk_demo.py - Version 0.1 2014-01-14
Use forward kinemtatics to move the arm to a specified set of joint angles
Created for the Pi Robot Project: http://www.pirobot.org
Copyright (c) 2014 Patrick Goebel. All rights reserved.
This program is free software; you can redistribute it and/or modify
it under the terms of the GNU General Public License as published by
the Free Software Foundation; either version 2 of the License, or
(at your option) any later version.5
This program is distributed in the hope that it will be useful,
but WITHOUT ANY WARRANTY; without even the implied warranty of
MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
GNU General Public License for more details at:
http://www.gnu.org/licenses/gpl.html
"""
import rospy, sys
import moveit_commander
from control_msgs.msg import GripperCommand
class MoveItDemo:
def __init__(self):
# Initialize the move_group API
moveit_commander.roscpp_initialize(sys.argv)
# Initialize the ROS node
rospy.init_node('moveit_demo', anonymous=True)
#GRIPPER_OPEN = [0.05]
#GRIPPER_CLOSED = [-0.03]
#GRIPPER_NEUTRAL = [0.01]
# Connect to the right_arm move group
robot_arm = moveit_commander.MoveGroupCommander('arm')
# Connect to the right_gripper move group
# right_gripper = moveit_commander.MoveGroupCommander('right_gripper')
# Get the name of the end-effector link
end_effector_link = robot_arm.get_end_effector_link()
# Display the name of the end_effector link
rospy.loginfo("The end effector link is: " + str(end_effector_link))
# Set a small tolerance on joint angles
robot_arm.set_goal_joint_tolerance(0.001)
# right_gripper.set_goal_joint_tolerance(0.001)
# Start the arm target in "resting" pose stored in the SRDF file
robot_arm.set_named_target('resting')
# Plan a trajectory to the goal configuration
traj = robot_arm.plan()
# Execute the planned trajectory
robot_arm.execute(traj)
# Pause for a moment
rospy.sleep(1)
# Set the gripper target to neutal position using a joint value target
# right_gripper.set_joint_value_target(GRIPPER_NEUTRAL)
# Plan and execute the gripper motion
# right_gripper.go()
# rospy.sleep(1)
# Set target joint values for the arm: joints are in the order they appear in
# the kinematic tree.
robot_arm_active_joints = robot_arm.get_active_joints()
rospy.loginfo("The robot_arm_active_joints is: " + str(robot_arm_active_joints))
joint_positions = [-1.0, -1.0, -1.0]
# Set the arm's goal configuration to the be the joint positions
robot_arm.set_joint_value_target(joint_positions)
rospy.loginfo("0000 set_joint_target_completed 0000 ")
# Plan and execute the motion
######robot_arm.go()
traj1 = robot_arm.plan()
#rospy.loginfo("11111111111111111111111111 "+ str(traj1))
# Execute the planned trajectory
robot_arm.execute(traj1)
rospy.loginfo("1111 execute traj_1 completed 1111 ")
rospy.sleep(1)
# Save this configuration for later
robot_arm.remember_joint_values('saved_config', joint_positions)
# Close the gripper as if picking something up
# right_gripper.set_joint_value_target(GRIPPER_CLOSED)
# right_gripper.go()
# rospy.sleep(1)
# Set the arm target to the named "straight_out" pose stored in the SRDF file
robot_arm.set_named_target('forward')
# Plan and execute the motion
########robot_arm.go()
traj2 = robot_arm.plan()
# Execute the planned trajectory
robot_arm.execute(traj2)
#rospy.loginfo("22222222222222222222222222223 "+ str(traj2))
rospy.loginfo("2222 execute traj_2 completed 2222 ")
rospy.sleep(1)
# Set the goal configuration to the named configuration saved earlier
robot_arm.set_named_target('saved_config')
# Plan and execute the motion
#######robot_arm.go()
traj3 = robot_arm.plan()
# Execute the planned trajectory
robot_arm.execute(traj3)
#rospy.loginfo("333333333333333333333333333333333333 "+ str(traj3))
rospy.loginfo("3333 execute traj_3 completed 3333")
rospy.sleep(1)
# Open the gripper as if letting something go
# right_gripper.set_joint_value_target(GRIPPER_OPEN)
# right_gripper.go()
# rospy.sleep(1)
# Return the arm to the named "resting" pose stored in the SRDF file
robot_arm.set_named_target('resting')
#######robot_arm.go()
traj4 = robot_arm.plan()
# Execute the planned trajectory
robot_arm.execute(traj4)
#rospy.loginfo("44444444444444444444444444444444 "+ str(traj4))
rospy.loginfo("4444 execute traj_4 completed 4444")
rospy.sleep(1)
# Return the gripper target to neutral position
# right_gripper.set_joint_value_target(GRIPPER_NEUTRAL)
# right_gripper.go()
# rospy.sleep(1)
# Cleanly shut down MoveIt
moveit_commander.roscpp_shutdown()
# Exit the script
moveit_commander.os._exit(0)
if __name__ == "__main__":
try:
MoveItDemo()
except rospy.ROSInterruptException:
pass
运行结果是机械臂执到达了脚本中所设定的几个位姿

1、观察topic之间的联系信息
xs@xs-PC:~$ rosrun rqt_graph rqt_graph
效果如下
2、观察joint_states话题中包含的position和velocity信息
xs@xs-PC:~$ rosrun rqt_plot rqt_plot
将postion【0】、postion【1】、postion【2】,velocity【0】、velocity【1】、velocity【2】加载上去,
效果如下
我们启动(做机械臂导航时遇到的问题5:如何使用ROS内嵌serial功能包实现串口通信)中的my_serial_node节点,来像串口助手发送状态信息
xs@xs-PC:~$ rosrun my_serial_node my_serial_node
串口助手接收到信息如下:完成数据接收。