关于视觉在机器人方面的关键问题
一个具备视觉的机器人,在生活中扮演什么角色?
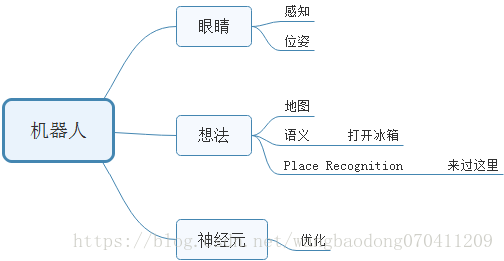
这个图表示了具备视觉的机器人,告诉我们机器人内部实现原理,以及最终能实现的功能,应用。
一旦该平台完善,“机器人+”就像“互联网+”一样百花齐放。其中,广告是最好的盈利点。数据服务是长远的发展路线。卖产品是眼前的利益。
还是回到现实中,视觉机器人遇到的关键问题汇总:
前端:
感知,不论是对自己和对周围场景,所以,需要传感器,需要融合算法。包括,在不同环境下路、人、车辆等等。
理解,也叫想法。这里主要是初级理解,包括识别物体,路径规划,等等。也叫语义地图。
在这个基础上,可以扩展多种应用,因为你理解了周围环境,所以,可以安排一些任务了。
注意和广告结合。
优化,也可以说是学习,基于上面两部分,通过优化对自我的认知提高。传统的非线性优化,闭环检测、概率论等。
通过上面三个过程,一个机器人基本具备了视觉的功能。
感知,比喻人的眼镜;理解,比喻我们想到的苹果、人、车辆;优化,才是我们大脑的神经元。
优化库:
ceres:
http://ceres-solver.org/nnls_tutorial.html#bundle-adjustment
g2o. 支持各种不同的solver, csparse, eigen什么的。号称可扩展性好。欧洲人喜欢用,有很多slam常用的edge/vertex type。
gtsam. gtsm 4.0 加了个新的expression,号称比ceres的AD快,而且可以compose。目前看来处理slam问题gtsam是最好的选择。
ceres. google用在Production code里,质量没得说,现在加入了一点点对slam的支持,tutorial里面有2d和3d slam的例子。
参考文档:
《Tutorial on Visual Odometry》Davide Scaramuzza