前言
本篇确实就是笔者以前研究pixhawk所写的英文文章,语句比较简单,没有复杂的句子。
I:The Relation Between Mavproxy and Dronekit
I would like to list out some materials before begining, which are all from dronkit.
- This topic explains how to set up and run DroneKit-Python (within MAVProxy) on the different host operating systems and then run a basic DroneKit app.
- The remaining dependencies (including MAVProxy), are installed when you get DroneKit-Python from the public PyPi repository:
- Install DroneKit-Python and its remaining dependencies (including MAVProxy) from the public PyPi repository:
To install DroneKit-Python using the installer:
- Download and run the latest MAVProxy installer — accept all prompts.
- Download and run the latest DroneKit installer — accept all prompts (install in the same location as MAVProxy).
Before executing DroneKit scripts you must first start MAVProxy and connect to your autopilot (simulated or real). The connection to the vehicle can be set up on the command line when starting MAVProxy or after MAVProxy is running.
Then, some important information following indicate the relation between them.
- DroneKit is implemented as a MAVProxy module (MAVProxy is installed automatically with DroneKit). The best way to load the DroneKit module into MAVProxy is to add it to the startup script (mavinit.scr).
- Alternatively you can choose to manually (re)load DroneKit into MAVProxy every time you need it:
MANUAL> module load droneapi.module.api
DroneAPI loaded
MANUAL>So, simple put, the dronkit is one of the module of Maxproxy. It’s time to see what’s the meaning of this. It sounds like the module of linux.
MAVProxy can be extended with modules. These run in parallel threads to the main MAVProxy program in order to maintain overall stability.Modules can include such things as GUI elements and diagnostic and monitoring applications.
This problem has been solved, go on with our work.
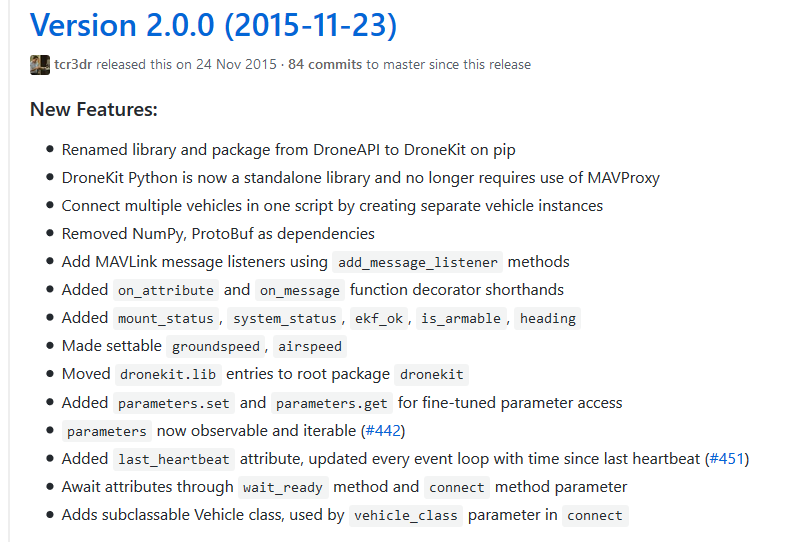
NOTE: I made some mistakes that the above text is from the dronekit whose version is 1.5.X. whereas it is independent of Marproxy after 2.0.X.
II: Compare Mavproxy and Misson Planner
I search this question but get nothing except stackoverflow, maybe it’s a strange quetion. I find there is a cooperation relation between mavproxy and misson plannner. And most pepole want to use mavproxy to control the UAV, meanwile, observe the data from the autopilot in misson planner.
I will do some basic experiments to compare the latency in the next post.
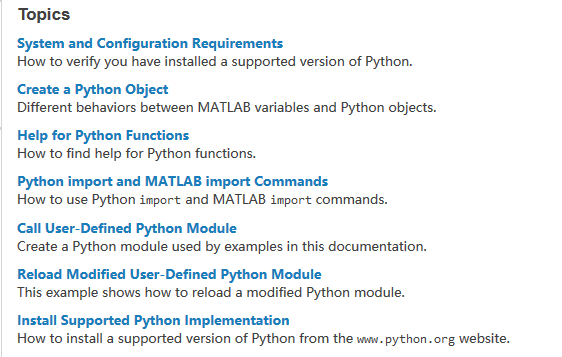
III: The Interface Between Matlab And Pyhon.
To call Python functions from MATLAB
The above context is from cpython.
- To call Matlab functions from Python.

The above context is from matlab.
On the surface, it’s very convenient to call each other. But, just look easy, hard to do. I will have a try in the next post.