接上文MITK框架分析,本文中部分公式不想再码了,直接截了图,忘看官们轻喷。(CSDN有必要搞一个word文档导入插件吧)
2.2图像分割实验
MITK系统有一个专门用于图像分割的插件Segmentation,它提供了针对2D/3D图像的手动和自动、半自动分割方法,同时提供了一些对分割后图像处理的工具。本文主要对3D分割进行研究和实验,2D分割主要是手动勾画,不在本文研究范围内。
2.2.1阈值分割法
Threshold和UL Threshold都是阈值分割工具,不同的是Threshold只标记用户指定阈值以上的像素点,UL Threshold标记用户指定阈值之间的像素点。实验结果如图8所示。

a、Threshold结果图

b、ULThreshold结果图
图8 阈值分割算法效果图
2.2.2Otsu分割法
Otsu(最大类间方差法)算法提供了一个自动确定阈值的阈值分割方法,是由日本学者大津与1979年提出的一种自适应的阈值确定的算法。它按图像的灰度特性,将其分成背景和目标两部分,背景与目标之间的类间方差越大,说明构成图像的两部分差别越大,因此使类间方差最大的分割意味着错分概率最小。

实验选取目标区域个数为4个,图9给出了Otsu算法作用于病人MRI图像的效果图。

图9 Otsu算法效果图
2.2.3 FastMarching分割法
Fast Marching算法是一种基于几何形变模型的医学图像分割方法,几何形变模型的基本思想是将曲线的形状变化用曲线演化理论来描述,即用曲率或法向量等几何度量表示曲线或曲面演化的速度函数。并将速度函数和图像数据关联起来,使曲线在对象边沿处停止演化。
MITK系统采用ITK提供的Fast Marching Level Set Segmentation方法构建FastMarching分割工具,即曲线演化的水平集实现方法。在图像处理应用中,要追踪的曲线被隐式表示为一个更高维曲面函数的水平集,该高维曲面函数被称为水平集函数,根据在固定坐标系中更新不同时刻下的水平集函数来模拟曲线变化。
Fast Marching算法步骤:
a、根据用户键入的Sigma,计算输入的原始图像与高斯导数的卷积得到图像梯度的幅值。;
b、将梯度幅值映射到速度图像,映射方法为Liner+Sigmoid函数,根据用户键入Alpha、Beta,Alpha为Linear函数参数,Beta为Sigmoid函数参数;
c、将速度图像输入FastMarchingImageFilter,Stopping为控制循环结束的TMAX;
d、Threshold参数用于配置图像的灰度值范围;
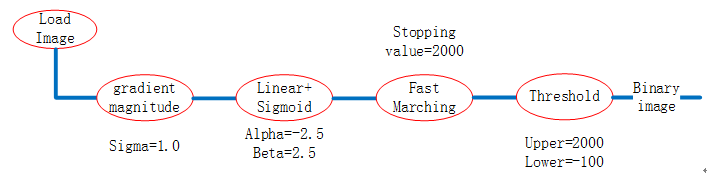
本算法耗时较长,对硬件计算能力需求较高,图10为默认参数下Fast Marching算法输出结果。

图10 FastMarching算法效果图
2.2.4 区域生长法
区域生长法是典型的串行区域分割方法,特点是将分割过程分解为多个多个顺序步骤,后续步骤根据前面步骤的结果进行判断而确定。区域生长的基本思想是将具有相似性质的像素集中起来构成区域,该方法需要首先选取一个种子点,然后将种子像素周围的相似像素合并到种子像素所在的区域。区域生长法的优点是设计简单,特别适用于分割小的结构如肿瘤和伤疤,与阈值分割类似,区域生长法也经常和其他分割算法配合使用。
MITK中的RegionGrowingTool采用连续阈值法(Connected Threshold)的变种自适应连续阈值法(Connected Adaptive Threshold)作为生长策略。连续阈值法的是基于用户提供的灰度区间,根据区间的最大值和最小值,如果邻近像素的像素值落在区间内,区域生长算法会将该像素点包含进区域内。
I(x)∈{lower, upper}
I表示图像像素值函数,x表示待判定的像素点位置。
自适应连续阈值法则会根据种子点的像素值自动确定灰度区间,用户也可以自己编辑灰度区间。
本实验选取MRI图像序列中3/8位置处的图像上投放区域生长种子点,以此保证肿瘤所属像素点占最大比例。勾选3DPreview功能,从图11的3D窗口可以直观看到整个肿瘤的大小外观。

图11 3D RegionGrowing算法效果图
2.2.5 分水岭法
分水岭分割是基于自然的启发算法来模拟水流通过地形起伏的现象从而研究总结出来的一种分割方法,其基本原理是将图像特征看作地理上的地貌特征,利用像素的灰度值分布特征,对每个符合特征的区域进行划分,形成边界以构成分水岭。
实现分水岭算法有多种方法,最通用最广泛的实现方法的是Vincent和Soille在1991年提出的模拟浸没算法以及Meyer在1994年提出的基于距离函数的算法。MITK采用基于标记的分水岭算法,水淹过程从预先定义好的标记像素开始,较好的克服了过度分割的不足。本质上讲,基于标记点的改进算法是利用先验知识来帮助分割的一种方法。因此,改进算法的关键在于如何获得准确的标记图像,即如何将前景物体与背景准确的标记出来。
MITK提供的watershed工具需要用户调节两个参数,一个是灰度阈值Threshold,用于产生梯度图像;一个是水平高度Level,用于合并或分裂各集水盆地之间的分水岭,调节这个参数可以控制过度分割的程度。根据MITK默认参数分割病人MRI图像,得到分割结果如下图所示。

图12 watershed算法默认参数效果图