首先从一个简单的二次曲线 求极小值开始

先任意取一个A点,对应一个横轴 但是这不是最低点。所以我们要想办法慢慢降低
点的位置,让他去接近最低点。如何才能保证改变
的值得到新的
。然后
对应的函数值是小于
对应的函数值呢?第一个问题是 改变x的值让y值变小。但是我们不知道x是该增大还是变小。所以我们考虑斜率。如果当前x点的斜率为正值那么自变量与函数值是同等方向变化,即y值变小,x也变小。如果斜率为负数那么反之。
在本例中 点所在处的斜率为负,所以我们需要增大
的值才能让
变小。那么我们能不能让
其中c是一个需要我们自己给定的一个正数。如果这样的话我们每一次获取到新的 x 值都要对其对应的y值进行判断他是否小于前一个y值。如果小于就继续迭代。反之停止迭代。但是在停止时很有可能出现如下情况
显然 值小于
。
值大于
所以在
处停止迭代。但是
点并不是最低点。 所以对于此方法 常数c的值不好控制。而且几乎很难得到最优解。
所以能不能让 c 是一个变量其满足这样的一个性质。x点在越靠近最低点时,c值越小,在到达最低点的时候c为零。这样x就不会越过最低点了。而且我们不用去判断他是否到达最低点。因为 c 为零时 x 无论怎么迭代都不会改变。所以最后 x 会停留在最低点。 那么到底有没有这么一个c 呢? 答案是有。
前面讨论了斜率的方向,接下来我们讨论一下斜率的大小。可以肯定的是在最低点附近的点的斜率一定是趋近于0的。
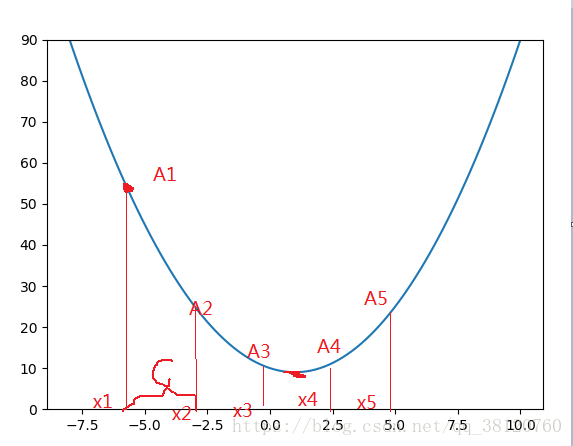
所以我们可以这么来定义迭代函数 其中a是一个人为给定的一个常数,用来控制下降的速率。k表示当前点的斜率。斜率越大下降为快(这里说的下降是指x的变化,不是y的变化)。下降的一般趋势是先快后慢,最后斜率为零,不再下降。本例的下降图例如下

需要注意的是 a 的取值。 如果a的值太大则会发生下面的情况会直接把最低点越过。而在两点之间来回震荡。
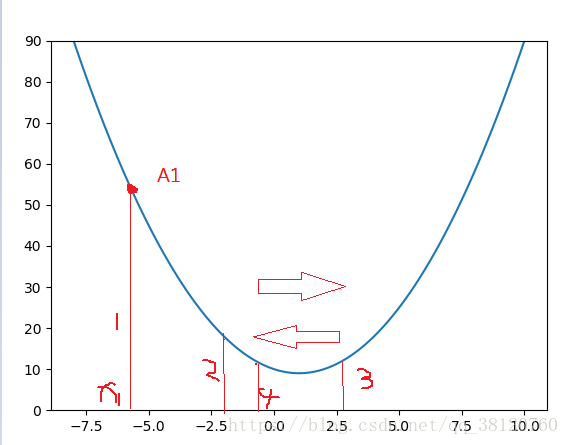
可能会在第三个点和第四个点来回震荡。
如果a 的值过小,又会影响下降的速率。影响算法的效率。
所以需要权衡 a 的取值
下面说说对于高维多元的情况。我们只需要在每一个方向上独立下降(需要求每一个方向上的斜率,即求偏导)。每一个方向的下降速率不同,所以每一个方向收敛的时刻就不同(收敛是指斜率为0)一个方向收敛了,那么这个方向上的数值就不会在变化。当所有方向都收敛时,算法就结束了。这就是使用斜率进行迭代的好处,不用人为判断什么时候迭代结束。