版权声明:本文为博主原创文章,未经博主允许不得转载。 https://blog.csdn.net/cuixing001/article/details/81415832
AR(Augmented Reality)是计算机视觉方面一个重要的研究方向,原来听说过,感觉很有意思,故究其原理,用一定的视觉算法加以实现。
这里主要用到相机标定和一些图像的投影透视变换的技术,标定的目的是获取相机的内外参,从而获得投影矩阵P,然后进行下面的点映射之间的关系。一般情况下的相机标定是非常成熟不过的东西了,技术文章也是铺天盖地,目前绝大数标定方法都属于张正友的方法,OpenCV和Matlab官方都是采用张正友的,在此不具体阐述,如有需要,请参考官方文档。但在现实应用中,张正友方法并非总是合适,要适合自己的场合使用,就需要掌握额外的高等数学知识,尤其是对相机矩阵P的理解。本篇博客不深入透析标定原理,坐标关系,只做简单说明。透视变换可参考我这篇博客原理。
一、基于AR的Demo
直接上动态gif图,把一部电影片段加进去了:),(限于CSDN只能上传小于5M的图片,没办法长传完整的( ▼-▼ ))
二、代码实现
运行以下代码前,需要实现对相机进行标定,简单标定可参考这里。“mydata.mat”为标定后存储的参数。为了提高速度,程序基本上没有循环,尽量采用矩阵向量运算。
function main()
% AR demo
% author:cuixingxing
% email: [email protected]
% 2018.8.4
%
close all;
clear;clc;
%% 导入各类参数,AR增强现实,加入图片
load('mydata.mat')% 相机标定的数据,保存相机cameraParameters对象,图像点和世界坐标点集
logo = imread('demo.png');% 读入自己的图片,图片任意
%%
movingPts = [1,1;
size(logo,2),1;
1,size(logo,1);
size(logo,2),size(logo,1)];
cap1 = webcam(3);
squareSize = 38.72;% 标定版方格宽度 mm
v = VideoWriter('my_AR.avi');% save
open(v);
colors = randi(255,12,3);% 12 条棱线颜色
player1 = vision.DeployableVideoPlayer('Location', [20, 400]);
frame1 = snapshot(cap1);
step(player1, frame1);
while player1.isOpen()
logo = imresize(logo,[200,320]);% 电影图像
frame1 = snapshot(cap1);
drawImg = frame1;
[imagePoints,boardSize,isused]=detectCheckerboardPoints(frame1);
if all(isused)&& size(imagePoints,1)==size(worldPoints1,1)
rows = boardSize(1)-1;
cols = boardSize(2) - 1;
% 世界坐标中4个角点坐标,这个定义好
point3D_1 = [0,0,0];
point3D_2 = [cols*squareSize,point3D_1(2),0];
point3D_3 = [point3D_1(1),rows*squareSize,0];
point3D_4 = [point3D_1(1),point3D_1(2),-220];% 单位毫米
% 抠图到长方体顶面
[rotMat,transVec] = extrinsics(imagePoints,worldPoints1,cameraParams1);
projectMat = cameraMatrix(cameraParams1,rotMat,transVec);
[lines,points2D] = GetSquareEdge(point3D_1,point3D_2,point3D_3,point3D_4,projectMat);
tform = fitgeotrans(movingPts,points2D(4:7,:),'projective');
logo_tf = imwarp(logo,tform);
[x,y,Height,Width] = GetHW(points2D(4:7,:),frame1);
if isempty(x)
continue;
end
logo_tf = imresize(logo_tf,[Height,Width]);
ROI = frame1(y:y+Height-1,x:x+Width-1,:);
ROI(logo_tf~=0) = logo_tf(logo_tf~=0);
frame1(y:y+Height-1,x:x+Width-1,:) = ROI;
% 在图像上画轴
drawImg = insertShape(frame1,'Line',lines,'LineWidth',8,'Color',colors);
step(player1, drawImg);
else
step(player1, drawImg);
end
writeVideo(v,drawImg);
end
close(v);
release(player1);
一些子函数:
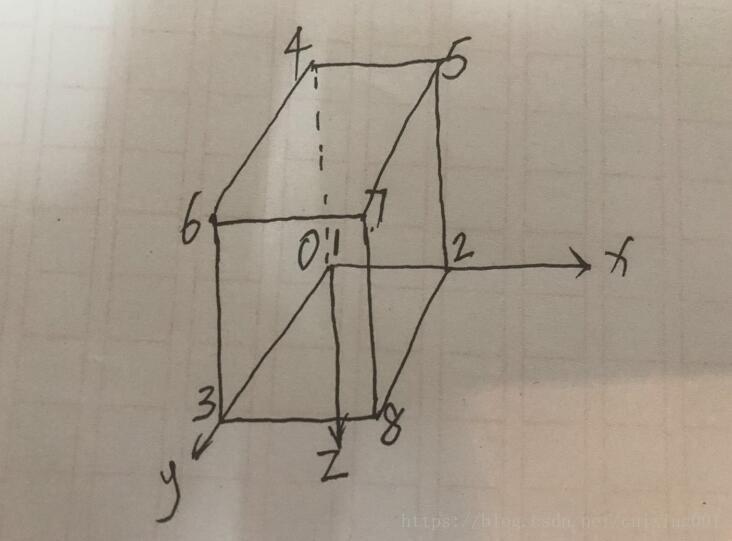
注意点顺序关系图为:
function [lines,points2D] = GetSquareEdge(point3D_1,point3D_2,point3D_3,point3D_4,projectMat)
% 功能:根据相邻的4个角点,获取正方形的棱边
% 输入:point3D_1,1*3 double ,[x,y,z],坐标原点世界坐标
% point3D_2,1*3 double ,[x,y,z],相邻角点世界坐标
% point3D_3,1*3 double ,[x,y,z],相邻角点世界坐标
% point3D_4,1*3 double ,[x,y,z],相邻角点世界坐标
% projectMat,4*3 double,相机投影矩阵,注意有的地方是3*4,有个转置关系
% 输出: lines, 12*4 double,形如[x1,y1,x2,y2; x3,y3,x4,y4,...]每行为每条线的起始点和终点坐标
% points2D, 8*2 double,图像上顶点坐标
%
% author:cuixingxing
% email: [email protected]
% 2018.8.4
%
point3D_5 = [point3D_2(1),point3D_1(2),point3D_4(3)];
point3D_6 = [point3D_1(1),point3D_3(2),point3D_4(3)];
point3D_7 = [point3D_2(1),point3D_3(2),point3D_4(3)];
point3D_8 = [point3D_2(1),point3D_3(2),point3D_1(3)];
points3D = [point3D_1;
point3D_2;
point3D_3;
point3D_4;
point3D_5;
point3D_6;
point3D_7;
point3D_8];
%% points2D
points2D = [points3D,ones(8,1)]*projectMat;
points2D = points2D./points2D(:,3);
points2D = points2D(:,1:2);
lines = [points2D(1,:),points2D(2,:);
points2D(1,:),points2D(3,:);
points2D(2,:),points2D(8,:);
points2D(3,:),points2D(8,:);
points2D(1,:),points2D(4,:);
points2D(3,:),points2D(6,:);
points2D(2,:),points2D(5,:);
points2D(7,:),points2D(8,:);
points2D(4,:),points2D(6,:);
points2D(4,:),points2D(5,:);
points2D(5,:),points2D(7,:);
points2D(6,:),points2D(7,:)];
function [minx,miny,Height,Width] = GetHW(points,frame)
% 功能:获取二维图像上n个平面点集points的最小平行于轴的矩形
% 输入:points, n*2 double ,[x,y]点集坐标,像素坐标
% frame,原图像
%输出: minWidth,矩形宽度,1*1 double
% minHeight,矩形高度,1*1 double
%
% author:cuixingxing
% email: [email protected]
% 2018.8.4
%
minx = round(min(points(:,1)));
maxx = round(max(points(:,1)));
miny = round(min(points(:,2)));
maxy = round(max(points(:,2)));
Width = maxx-minx;
Height = maxy-miny;
if minx<=0||miny<=0||minx+Width>=size(frame,2)||miny+Height>=size(frame,1)
minx =[];
miny = [];
Width = [];
Height = [];
end