你好!这里是风筝的博客,
欢迎和我一起交流。
好久都没有写东西了,最近来广州某公司实习,顺便记录下吧。
吐槽下,因为是二级保密单位,公司里电脑不给联网,贼难受。。。。。。
不过第一次接触真正的产品开发,正式的工程项目,还是有很多值得我学习的地方的。
公司用的是联芯的一套方案,分配电脑后,师傅给了我一个简单的任务:给一台手机(Android6.0)移植光线&距离传感器驱动和充电呼吸灯芯片的驱动。
因为是移植,所以,,,,,,,,我觉得我可以叫设备树工程师………..
任务很简单,但是我却对代码陷入了沉思。
当我拿到一份代码方案时,最简单的,操作GPIO。
当我最初学习的时候,用的是S3C2440,从网上很多资料还是知道GPIO的宏,如:S3C2410_GPF(4)
在我使用全志 H3的芯片,大部分我都是直接操作寄存器了,而且网上也有资料可循。
现在我在公司接触的这块芯片,网上根本没有资料,资料就是厂家提供的说明文档,那以操作GPIO为例,我该怎么操作一个GPIO呢?
其实有经验的人都知道:模仿!
看工程下别人写的代码就知道了,这算是一种取巧捷径,那我们现在是思考,该怎么做呢?
因为公司是完全要求保密的,代码我也拷不出来,我就以我手上的sun8i-h3代码分析吧:
首先,打开手册,查找芯片手册里关于GPIO的章节:
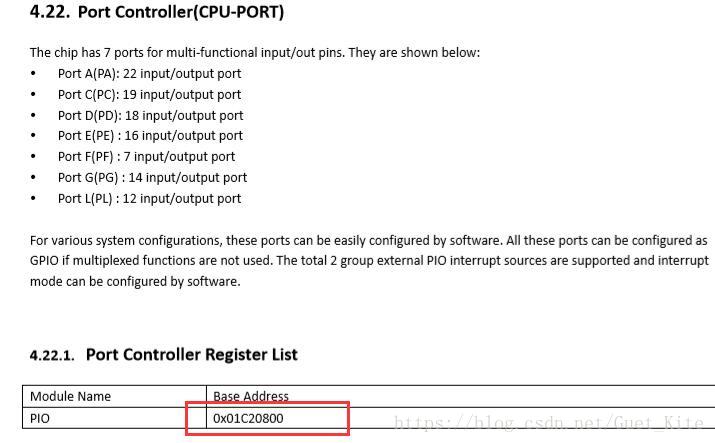
这里我们可以看出GPIO的基地址是:0x01C20800
像我公司里用的芯片,是普通GPIO有一个基地址,可复用的GPIO又是另一个基地址,所以有gpio节点和pinctrl节点。
但是现在我们sun8i-h3都放在一个基地址了,所以gpio、pinctrl描述的是同一个节点。
我们去内核搜索一下,grep一下0x01C20800这个地址即可:
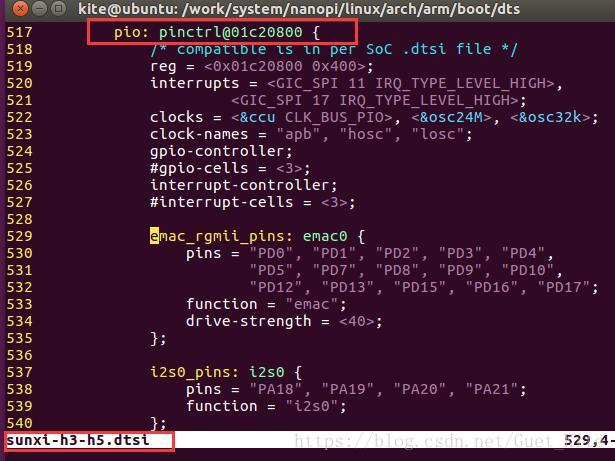
接着我们可以去找下他的compatible属性,搜索一下 “&pio”很快就找到:

compatible属性是:”allwinner,sun8i-h3-pinctrl”
那么可以安心去找他的代码了:
static const struct sunxi_pinctrl_desc sun8i_h3_pinctrl_data = {
.pins = sun8i_h3_pins,//数组内容放在pins字段
.npins = ARRAY_SIZE(sun8i_h3_pins),
.irq_banks = 2,
.irq_read_needs_mux = true
};
static int sun8i_h3_pinctrl_probe(struct platform_device *pdev)
{
return sunxi_pinctrl_init(pdev,
&sun8i_h3_pinctrl_data);
}
static const struct of_device_id sun8i_h3_pinctrl_match[] = {
{ .compatible = "allwinner,sun8i-h3-pinctrl", },
{}
};
static struct platform_driver sun8i_h3_pinctrl_driver = {
.probe = sun8i_h3_pinctrl_probe,
.driver = {
.name = "sun8i-h3-pinctrl",
.of_match_table = sun8i_h3_pinctrl_match,
},
};这里面有个数组需要注意一下,那就是:sun8i_h3_pins
static const struct sunxi_desc_pin sun8i_h3_pins[] = {
SUNXI_PIN(SUNXI_PINCTRL_PIN(A, 0),
SUNXI_FUNCTION(0x0, "gpio_in"),
SUNXI_FUNCTION(0x1, "gpio_out"),
SUNXI_FUNCTION(0x2, "uart2"), /* TX */
SUNXI_FUNCTION(0x3, "jtag"), /* MS */
SUNXI_FUNCTION_IRQ_BANK(0x6, 0, 0)), /* PA_EINT0 */
SUNXI_PIN(SUNXI_PINCTRL_PIN(A, 1),
SUNXI_FUNCTION(0x0, "gpio_in"),
SUNXI_FUNCTION(0x1, "gpio_out"),
SUNXI_FUNCTION(0x2, "uart2"), /* RX */
SUNXI_FUNCTION(0x3, "jtag"), /* CK */
SUNXI_FUNCTION_IRQ_BANK(0x6, 0, 1)), /* PA_EINT1 */
SUNXI_PIN(SUNXI_PINCTRL_PIN(A, 2),
SUNXI_FUNCTION(0x0, "gpio_in"),
SUNXI_FUNCTION(0x1, "gpio_out"),
SUNXI_FUNCTION(0x2, "uart2"), /* RTS */
SUNXI_FUNCTION(0x3, "jtag"), /* DO */
SUNXI_FUNCTION_IRQ_BANK(0x6, 0, 2)), /* PA_EINT2 */
SUNXI_PIN(SUNXI_PINCTRL_PIN(A, 3),
SUNXI_FUNCTION(0x0, "gpio_in"),
SUNXI_FUNCTION(0x1, "gpio_out"),
SUNXI_FUNCTION(0x2, "uart2"), /* CTS */
SUNXI_FUNCTION(0x3, "jtag"), /* DI */
SUNXI_FUNCTION_IRQ_BANK(0x6, 0, 3)), /* PA_EINT3 */
SUNXI_PIN(SUNXI_PINCTRL_PIN(A, 4),
SUNXI_FUNCTION(0x0, "gpio_in"),
SUNXI_FUNCTION(0x1, "gpio_out"),
SUNXI_FUNCTION(0x2, "uart0"), /* TX */
SUNXI_FUNCTION_IRQ_BANK(0x6, 0, 4)), /* PA_EINT4 */
//......
}看到那些”管脚映射结构体”数组里的参数,A0、A1……是不是觉得有有那么一丝丝熟悉?
里面的参数可以解读为:以A6为例
配置0x0为输入,0x1为输出,0x2为复用为串口,0x6为中断线配置,和芯片手册上是完全对应的!
进入probe函数看,挑一些重点的来写吧:
int sunxi_pinctrl_init_with_variant(struct platform_device *pdev,
const struct sunxi_pinctrl_desc *desc,
unsigned long variant)
{
pctl = devm_kzalloc(&pdev->dev, sizeof(*pctl), GFP_KERNEL);
//......
res = platform_get_resource(pdev, IORESOURCE_MEM, 0);
pctl->membase = devm_ioremap_resource(&pdev->dev, res);//基地址,也就是0x01C20800
pctl->dev = &pdev->dev;
pctl->desc = desc;
pctl->variant = variant;
//......
ret = sunxi_pinctrl_build_state(pdev);//重要!和pinctrl子系统有关,懒得分析了,后面给链接,讲得挺好的
//......
for (i = 0, pin_idx = 0; i < pctl->desc->npins; i++) {//取出数组内容
const struct sunxi_desc_pin *pin = pctl->desc->pins + i;//数组内容
if (pin->variant && !(pctl->variant & pin->variant))
continue;
pins[pin_idx++] = pin->pin;
}
//......
pctrl_desc->name = dev_name(&pdev->dev);
pctrl_desc->owner = THIS_MODULE;
pctrl_desc->pins = pins;//里面就是之前数组里的内容
pctrl_desc->npins = pctl->ngroups;
pctrl_desc->confops = &sunxi_pconf_ops;//和pinctrl里pinctrl_select_state函数使用有关,即(pinctrl_select_state)
pctrl_desc->pctlops = &sunxi_pctrl_ops;//和pinctrl里pinctrl_select_state函数使用有关
pctrl_desc->pmxops = &sunxi_pmx_ops;//和pinctrl里pinctrl_select_state函数使用有关
pctl->pctl_dev = devm_pinctrl_register(&pdev->dev, pctrl_desc, pctl);//和pinctrl有关,注册
//......
last_pin = pctl->desc->pins[pctl->desc->npins - 1].pin.number;
pctl->chip->owner = THIS_MODULE;
pctl->chip->request = gpiochip_generic_request,
pctl->chip->free = gpiochip_generic_free,
pctl->chip->direction_input = sunxi_pinctrl_gpio_direction_input,
pctl->chip->direction_output = sunxi_pinctrl_gpio_direction_output,
pctl->chip->get = sunxi_pinctrl_gpio_get,
pctl->chip->set = sunxi_pinctrl_gpio_set,
pctl->chip->of_xlate = sunxi_pinctrl_gpio_of_xlate,
pctl->chip->to_irq = sunxi_pinctrl_gpio_to_irq,
pctl->chip->of_gpio_n_cells = 3,//cells参数个数
pctl->chip->can_sleep = false,
pctl->chip->ngpio = round_up(last_pin, PINS_PER_BANK) -
pctl->desc->pin_base;
pctl->chip->label = dev_name(&pdev->dev);
pctl->chip->parent = &pdev->dev;
pctl->chip->base = pctl->desc->pin_base;
ret = gpiochip_add_data(pctl->chip, pctl);
for (i = 0; i < pctl->desc->npins; i++) {
const struct sunxi_desc_pin *pin = pctl->desc->pins + i;
ret = gpiochip_add_pin_range(pctl->chip, dev_name(&pdev->dev),
pin->pin.number - pctl->desc->pin_base,
pin->pin.number, 1);//建立动态链表chip->pin_ranges,node为gpio_pin_range,其成员range包含pin脚基地址。
if (ret)
goto gpiochip_error;
}
//后面就是一些和irq相关的东西了
}可以看出,这个函数,一开始
a)把GPIO的基地址取出来,放到pctl->membase里。
b)sunxi_pinctrl_build_state函数,这是和pinctrl子系统有关的,里面差不多是:将pctl->desc的子项数据(即sunxi_pinctrl_desc数据)复制到pctl相应子项(sunxi_pinctrl结构),文章末尾我会放一篇文章链接,讲的还不错,看那个即可。
c)把之前描述GPIO的数组放到pctrl_desc结构体中,以及填充confops、pctlops和pmxops三个字段,这三个字段就厉害了,当我们使用pinctrl_select_state(pinctrl的API)函数时就是调用的这些!
d)填充pctl->chip里面的各个字段,其中字段:direction_input、direction_output和get、set字段是我们所熟悉的,当我们使用GPIO的函数,如:GPIO_SET_VALUE或者GPIO_GET_VALUE时就是调用到里面的回调函数!还有注意of_xlate这个字段,我们在获取设备树节点时也要用到!而且其中of_gpio_n_cells字段也让我们知道,设备树里描述GPIO的属性是三个参数。
e)调用gpiochip_add_data,其实如果我们不是从设备树里通过compatible属性来反推代码的话,也可以直接搜索这个函数,因为每个平台都会调用这个函数来添加GPIO,这里就是GPIO驱动将通过chip来与pinctrl联系
举个例子,当我们要从设备树获取GPIO时,API为:
of_get_named_gpio_flags函数
int of_get_named_gpio_flags(struct device_node *np, const char *list_name,
int index, enum of_gpio_flags *flags)
{
struct gpio_desc *desc;
desc = of_get_named_gpiod_flags(np, list_name, index, flags);//获取描述
if (IS_ERR(desc))
return PTR_ERR(desc);
else
return desc_to_gpio(desc);//这里才是通过描述得到具体的GPIO
}其中
struct gpio_desc *of_get_named_gpiod_flags(struct device_node *np,
const char *propname, int index, enum of_gpio_flags *flags)
{
ret = of_parse_phandle_with_args(np, propname, "#gpio-cells", index,
&gpiospec);//获取参数,存放在gpiospec里
chip = of_find_gpiochip_by_xlate(&gpiospec);
desc = of_xlate_and_get_gpiod_flags(chip, &gpiospec, flags);
return desc;
}重点就在of_xlate_and_get_gpiod_flags函数里:
static struct gpio_desc *of_xlate_and_get_gpiod_flags(struct gpio_chip *chip,
struct of_phandle_args *gpiospec,
enum of_gpio_flags *flags)
{
int ret;
if (chip->of_gpio_n_cells != gpiospec->args_count)
return ERR_PTR(-EINVAL);
ret = chip->of_xlate(chip, gpiospec, flags);
if (ret < 0)
return ERR_PTR(ret);
return gpiochip_get_desc(chip, ret);
}可以看到,这里就是会调用到我们之前说的of_xlate回调函数了,即sunxi_pinctrl_gpio_of_xlate函数:
static int sunxi_pinctrl_gpio_of_xlate(struct gpio_chip *gc,
const struct of_phandle_args *gpiospec,
u32 *flags)
{
int pin, base;
base = PINS_PER_BANK * gpiospec->args[0];
pin = base + gpiospec->args[1];
if (pin > gc->ngpio)
return -EINVAL;
if (flags)
*flags = gpiospec->args[2];
return pin;
}可以简单看出,我们的设备树里GPIO的属性有三个参数,第一个是base,第二个是pin引脚,第三个是flag标志了。
看了下设备树,也确实是这样写的:

设备树这里描述的就是A10了,从芯片文档我们可知,分为好几组IO口,第0组就是A。也就是base是0,pin是10,flags是GPIO_ACTIVE_HIGH。
再者,of_get_named_gpiod_flags函数的返回值为gpio_desc结构体,会通过调用desc_to_gpio函数通过gpio_desc得到具体的GPIO:
int desc_to_gpio(const struct gpio_desc *desc)
{
//gdev->base在gpiochip_add_data函数填充
return desc->gdev->base + (desc - &desc->gdev->descs[0]);
}同理
我们在设置某个GPIO为高时:
static inline void gpio_set_value(unsigned int gpio, int value)
{
__gpio_set_value(gpio, value);
}__gpio_set_value
–>gpiod_set_raw_value
–>_gpiod_set_raw_value
–>chip->set(chip, gpio_chip_hwgpio(desc), value);//调用set回调函数
gpio_chip_hwgpio:获取该gpio号对应于该chip的offset,由于chip的起始号不一定就是开始与系统全局desc的起点,需要这个函数转换一下
其中set回调函数就是sunxi_pinctrl_gpio_set函数了:
static void sunxi_pinctrl_gpio_set(struct gpio_chip *chip,
unsigned offset, int value)
{
struct sunxi_pinctrl *pctl = gpiochip_get_data(chip);
u32 reg = sunxi_data_reg(offset);
u8 index = sunxi_data_offset(offset);
unsigned long flags;
u32 regval;
raw_spin_lock_irqsave(&pctl->lock, flags);
regval = readl(pctl->membase + reg);
if (value)
regval |= BIT(index);
else
regval &= ~(BIT(index));
writel(regval, pctl->membase + reg);
raw_spin_unlock_irqrestore(&pctl->lock, flags);
}里面基本就是:
先读取GPIO寄存器的值
修改值
再写回去!
其中读写的地址为(pctl->membase + reg),这里pctl->membase就是我们文章一开始分析时获取到的0x01C20800 地址了。
.
关于什么使用pinctrl,有这么几个API:
struct pinctrl *devm_pinctrl_get(struct device *dev)
pinctrl_lookup_state //寻找一个pin的配置
pinctrl_select_state // 设置选择一个pin的配置
.
关于pinctrl的文章,可以看看这个:
链接:
gpio子系统和pinctrl子系统(一)
gpio子系统和pinctrl子系统(二)
gpio子系统和pinctrl子系统(三)
Linux内核中提供了pinctrl子系统,目的是为了统一各SoC厂商的pin脚管理,避免各SoC厂商各自实现相同的pin脚管理子系统,减少SoC厂商系统移植工作量。
功能:
1. 管理系统中所有可以控制的pin。在系统初始化的时候,枚举所有可以控制的pin,并标识这些pin。
2. 管理这些pin的复用(Multiplexing)。对于SOC而言,其引脚除了配置成普通GPIO之外,若干个引脚还可以组成一个pin group,形成特定的功能。例如pin number是{ 0, 8, 16, 24 }这四个引脚组合形成一个pin group,提供SPI的功能。pin control subsystem要管理所有的pin group。
3. 配置这些pin的特性。例如配置该引脚上的pull-up/down电阻,配置drive strength等。
4. 与GPIO子系统的交互
5. 实现pin中断
关于为什么引进pinctrl,看这篇文章:Pinctrl基础简介
即:Gpiolib方式的缺点在于:当同一套代码对应多个board设计时,需要在board--gpiomux.c文件中加宏进行区分。对于不同平台项目,在board-msm8974-gpiomux.c文件中添加了很多宏控。
pinctrl方式可以避免代码中的这种冗余代码,它将board--gpiomux.c文件中的配置信息移到-pinctrl.dtsi;这样,针对不同project的board设计,分别在各自project的-pinctrl.dtsi中定义各自的gpio配置信息。
.
gpio子系统让驱动工程师不用关心底层gpio chip的具体实现,让bsp工程师不用关心上层驱动工程师的使用方式。pinctrl子系统帮我们管理了pin信息,包括了pin的mux和conf,同时也透明的处理了与gpio子系统的关联以及设备模型的关联。
了解更多,请点击:蜗窝科技