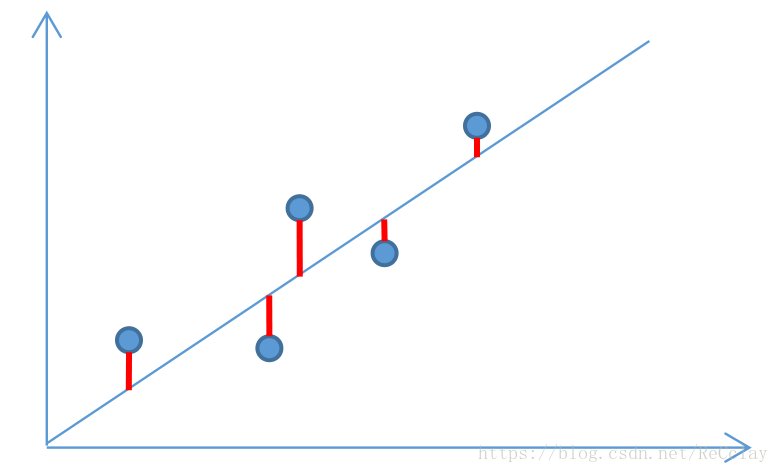
“二乘”意即平方的含义,所以这里也可以称为“最小平方估计”拟合,那么也就有了谁的平方的问题了,直观上理解就是测量值与统计估计值的偏差,工程上又叫残余误差。而“最小”意即所有的残余误差的平方和最小!
通过下图更直观理解,就是让所有红线分别平方,然后求和,所得的值最小!
假设现有一组数据【x1,y1】【x2,y2】…【xn,yn】
设其拟合直线表达式为:
(1)
y
=
a
+
b
x
y=a+bx\tag{1}
y = a + b x ( 1 )
对应残余误差表达式为:
(2)
d
i
=
y
i
−
(
a
+
b
x
i
)
d_{i}~ = y_{i} - (a+bx_{i})\tag{2}
d i = y i − ( a + b x i ) ( 2 )
最小二乘登场:
(3)
D
i
=
∑
i
=
1
n
d
i
2
=
∑
i
=
1
n
(
y
i
−
a
−
b
x
i
)
2
D_{i}=\sum_{i=1} ^{n} d_{i}^{2} = \sum_{i=1} ^{n}(y_{i}-a-bx_{i})^{2}\tag{3}
D i = i = 1 ∑ n d i 2 = i = 1 ∑ n ( y i − a − b x i ) 2 ( 3 )
因为使得平方和最小,意即求导为0,那么我们就分别对该式子的系数
a
、
b
a、b
a 、 b
(4)
{
∂
D
i
∂
a
=
∑
i
=
1
n
2
(
y
i
−
a
−
b
x
i
)
(
−
1
)
=
−
2
(
∑
i
=
1
n
y
i
−
n
a
−
b
∑
i
=
1
n
x
i
)
=
0
∂
D
i
∂
b
=
∑
i
=
1
n
2
(
y
i
−
a
−
b
x
i
)
(
−
x
i
)
=
−
2
(
∑
i
=
1
n
x
i
y
i
−
a
∑
i
=
1
n
x
i
−
b
∑
i
=
1
n
x
i
2
)
=
0
\begin{cases} \frac {\partial D_{i}} {\partial a} = \sum\limits _{i=1}^{n}2(y_{i}-a-bx_{i})(-1) = -2(\sum\limits _{i=1} ^{n}y_{i}-na-b\sum\limits _{i=1} ^{n} x_{i}) = 0 \\ \\ \frac {\partial D_{i}} {\partial b} = \sum\limits _{i=1}^{n}2(y_{i}-a-bx_{i})(-x_{i}) = -2(\sum\limits _{i=1} ^{n}x_{i}y_{i}-a\sum\limits _{i=1}^{n} x_{i}-b\sum\limits _{i=1} ^{n} x_{i}^2) = 0\tag{4} \end{cases}
⎩ ⎪ ⎪ ⎪ ⎪ ⎨ ⎪ ⎪ ⎪ ⎪ ⎧ ∂ a ∂ D i = i = 1 ∑ n 2 ( y i − a − b x i ) ( − 1 ) = − 2 ( i = 1 ∑ n y i − n a − b i = 1 ∑ n x i ) = 0 ∂ b ∂ D i = i = 1 ∑ n 2 ( y i − a − b x i ) ( − x i ) = − 2 ( i = 1 ∑ n x i y i − a i = 1 ∑ n x i − b i = 1 ∑ n x i 2 ) = 0 ( 4 )
整理可得,
(5)
{
(
∑
i
=
1
n
y
i
−
n
a
−
b
∑
i
=
1
n
x
i
)
=
0
∑
i
=
1
n
x
i
y
i
−
a
∑
i
=
1
n
x
i
−
b
∑
i
=
1
n
x
i
2
)
=
0
⟹
{
a
=
y
‾
−
b
x
‾
b
=
x
y
‾
−
x
‾
y
‾
x
2
‾
−
(
x
‾
)
2
\begin{cases} (\sum \limits_{i=1} ^{n}y_{i}-na-b\sum\limits _{i=1} ^{n} x_{i}) = 0 \\ \\ \sum\limits _{i=1} ^{n}x_{i}y_{i}-a\sum\limits _{i=1}^{n} x_{i}-b\sum\limits _{i=1} ^{n} x_{i}^2) = 0 \end{cases}\Longrightarrow \begin{cases} a=\overline{y}-b\overline{x} \\ \\ b=\frac{\overline{xy}-\overline{x}\overline{y}}{\overline{x^2}-(\overline{x})^2} \end{cases}\tag{5}
⎩ ⎪ ⎪ ⎪ ⎪ ⎨ ⎪ ⎪ ⎪ ⎪ ⎧ ( i = 1 ∑ n y i − n a − b i = 1 ∑ n x i ) = 0 i = 1 ∑ n x i y i − a i = 1 ∑ n x i − b i = 1 ∑ n x i 2 ) = 0 ⟹ ⎩ ⎪ ⎨ ⎪ ⎧ a = y − b x b = x 2 − ( x ) 2 x y − x y ( 5 )
clc;
clear;
%录入X轴数据
for a = 1:30
x(a) = a-1;
end
%录入Y轴数据
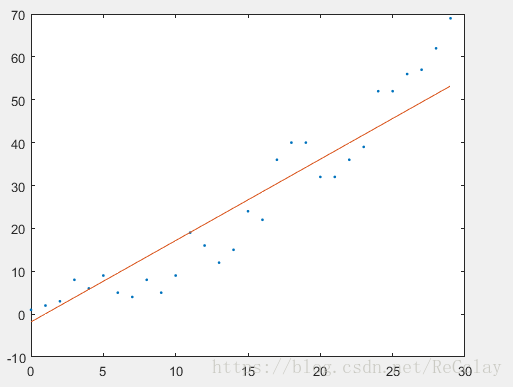
y=[1,2,3,8,6,9,5,4,8,5,9,19,16,12,15,24,22,36,40,40,32,32,36,39,52,52,56,57,62,69];
figure;
plot(x,y,'.');%画点
hold on
b = ( mean(x*y(:)) - mean(x(:)).*mean(y(:)) ) / (mean(x*x(:))-mean(x(:))^2 );
a = mean(y(:)) - b*mean(x(:));
y1 = a+b*x;
plot(x,y1);
同时,假设有一组数据【x1,y1】【x2,y2】…【xn,yn】
设拟合多项式表达式为:
(1)
y
=
a
+
a
1
x
+
.
.
.
+
a
k
x
k
y=a+a_{1}x+...+a_{k}x^{k}\tag{1}
y = a + a 1 x + . . . + a k x k ( 1 )
残余误差和表达式为:
(2)
D
2
=
∑
i
=
1
n
[
y
i
−
(
a
0
+
a
1
x
i
+
.
.
.
+
a
k
+
x
i
k
)
]
2
D^{2}=\sum_{i=1}^{n}[y_{i}-(a_{0}+a_{1}x_{i}+...+a_{k}+x_{i}^{k})]^{2}\tag{2}
D 2 = i = 1 ∑ n [ y i − ( a 0 + a 1 x i + . . . + a k + x i k ) ] 2 ( 2 )
为求平方和最小,我们只需对系数
a
0
a
k
a_{0}~a_{k}
a 0 a k
(3)
{
−
2
∑
i
=
1
n
[
y
i
−
(
a
0
+
a
1
x
i
+
.
.
.
+
a
k
x
i
k
)
]
=
0
−
2
∑
i
=
1
n
[
y
i
−
(
a
0
+
a
1
x
i
+
.
.
.
+
a
k
x
i
k
)
]
x
i
=
0
.
.
.
.
.
.
−
2
∑
i
=
1
n
[
y
i
−
(
a
0
+
a
1
x
i
+
.
.
.
+
a
k
x
i
k
)
]
x
i
k
=
0
\begin{cases} -2\sum\limits _{i=1}^{n}[y_{i}-(a_{0}+a_{1}x_{i}+...+a_{k}x_{i}^{k})] = 0 \\ -2\sum\limits _{i=1}^{n}[y_{i}-(a_{0}+a_{1}x_{i}+...+a_{k}x_{i}^{k})]x_{i} = 0\\ ......\\ -2\sum\limits _{i=1}^{n}[y_{i}-(a_{0}+a_{1}x_{i}+...+a_{k}x_{i}^{k})]x_{i}^{k} = 0 \end{cases}\tag{3}
⎩ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎨ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎧ − 2 i = 1 ∑ n [ y i − ( a 0 + a 1 x i + . . . + a k x i k ) ] = 0 − 2 i = 1 ∑ n [ y i − ( a 0 + a 1 x i + . . . + a k x i k ) ] x i = 0 . . . . . . − 2 i = 1 ∑ n [ y i − ( a 0 + a 1 x i + . . . + a k x i k ) ] x i k = 0 ( 3 )
上述等式继续化简可得:
(4)
{
a
0
n
+
a
1
∑
i
=
1
n
x
i
+
.
.
.
+
a
k
∑
i
=
1
n
x
i
k
=
∑
i
=
1
n
x
i
0
y
i
a
0
∑
i
=
1
n
x
i
+
a
1
∑
i
=
1
n
x
i
2
+
.
.
.
+
a
k
∑
i
=
1
n
x
i
k
+
1
=
∑
i
=
1
n
x
i
1
y
i
.
.
.
a
0
∑
i
=
1
n
x
i
k
+
a
1
∑
i
=
1
n
x
i
k
+
1
+
.
.
.
+
a
k
∑
i
=
1
n
x
i
2
k
=
∑
i
=
1
n
x
i
k
y
i
\begin{cases} a_{0}n+a_{1}\sum\limits_{i=1}^{n}x_{i}+...+a_{k}\sum\limits _{i=1}^{n}x_{i}^{k}=\sum\limits _{i=1}^{n}x_{i}^{0}y_{i}\\ a_{0}\sum\limits_{i=1}^{n}x_{i}+a_{1}\sum\limits_{i=1}^{n}x_{i}^{2}+...+a_{k}\sum\limits_{i=1}^{n}x_{i}^{k+1}=\sum\limits_{i=1}^{n}x_{i}^{1}y_{i}\\ ...\\ a_{0}\sum\limits_{i=1}^{n}x_{i}^{k}+a_{1}\sum\limits_{i=1}^{n}x_{i}^{k+1}+...+a_{k}\sum\limits_{i=1}^{n}x_{i}^{2k}=\sum\limits_{i=1}^{n}x_{i}^{k}y_{i} \end{cases}\tag{4}
⎩ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎨ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎧ a 0 n + a 1 i = 1 ∑ n x i + . . . + a k i = 1 ∑ n x i k = i = 1 ∑ n x i 0 y i a 0 i = 1 ∑ n x i + a 1 i = 1 ∑ n x i 2 + . . . + a k i = 1 ∑ n x i k + 1 = i = 1 ∑ n x i 1 y i . . . a 0 i = 1 ∑ n x i k + a 1 i = 1 ∑ n x i k + 1 + . . . + a k i = 1 ∑ n x i 2 k = i = 1 ∑ n x i k y i ( 4 )
将这些等式表达成矩阵的形式,可以得到如下矩阵:
(5)
[
n
∑
i
=
1
n
x
i
⋯
∑
i
=
1
n
x
i
k
∑
i
=
1
n
x
i
∑
i
=
1
n
x
i
2
⋯
∑
i
=
1
n
x
i
k
+
1
⋮
⋮
⋱
⋮
∑
i
=
1
n
x
k
∑
i
=
1
n
x
i
k
+
1
⋯
∑
i
=
1
n
x
i
2
k
]
[
a
0
a
1
⋮
a
k
]
=
[
∑
i
=
1
n
y
i
∑
i
=
1
n
x
i
y
i
⋮
∑
i
=
1
n
x
i
k
y
i
]
\begin{bmatrix} n & \sum\limits_{i=1}^{n}x_{i} & \cdots & \sum\limits_{i=1}^{n}x_{i}^{k} \\ \sum\limits_{i=1}^{n}x_{i} & \sum\limits_{i=1}^{n}x_{i}^{2} & \cdots & \sum\limits_{i=1}^{n}x_{i}^{k+1} \\ \vdots & \vdots & \ddots & \vdots \\ \sum\limits_{i=1}^{n}x_{k} & \sum\limits_{i=1}^{n}x_{i}^{k+1} & \cdots & \sum\limits_{i=1}^{n}x_{i}^{2k} \\ \end{bmatrix} \begin{bmatrix} a_{0}\\a_{1}\\ \vdots \\ a_{k} \end{bmatrix}= \begin{bmatrix} \sum\limits_{i=1}^{n}y_{i} \\ \sum\limits_{i=1}^{n}x_{i}y_{i} \\ \vdots \\ \sum\limits_{i=1}^{n}x_{i}^{k}y_{i} \end{bmatrix} \tag{5}
⎣ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎡ n i = 1 ∑ n x i ⋮ i = 1 ∑ n x k i = 1 ∑ n x i i = 1 ∑ n x i 2 ⋮ i = 1 ∑ n x i k + 1 ⋯ ⋯ ⋱ ⋯ i = 1 ∑ n x i k i = 1 ∑ n x i k + 1 ⋮ i = 1 ∑ n x i 2 k ⎦ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎤ ⎣ ⎢ ⎢ ⎢ ⎡ a 0 a 1 ⋮ a k ⎦ ⎥ ⎥ ⎥ ⎤ = ⎣ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎡ i = 1 ∑ n y i i = 1 ∑ n x i y i ⋮ i = 1 ∑ n x i k y i ⎦ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎤ ( 5 )
然后接着将这个范德蒙德行列式化简,可以得到:
(6)
[
1
x
1
⋯
x
1
k
1
x
2
⋯
x
2
k
⋮
⋮
⋱
⋮
1
x
n
⋯
x
n
k
]
[
a
0
a
1
⋮
a
k
]
=
[
y
1
y
2
⋮
y
n
]
\begin{bmatrix} 1 & x_{1} & \cdots & x_{1}^{k} \\ 1 & x_{2} & \cdots &x_{2}^{k} \\ \vdots & \vdots & \ddots & \vdots \\ 1 & x_{n} & \cdots & x_{n}^{k} \\ \end{bmatrix} \begin{bmatrix} a_{0}\\a_{1}\\ \vdots \\ a_{k} \end{bmatrix}= \begin{bmatrix} y_{1}\\y_{2}\\ \vdots \\ y_{n} \end{bmatrix} \tag{6}
⎣ ⎢ ⎢ ⎢ ⎡ 1 1 ⋮ 1 x 1 x 2 ⋮ x n ⋯ ⋯ ⋱ ⋯ x 1 k x 2 k ⋮ x n k ⎦ ⎥ ⎥ ⎥ ⎤ ⎣ ⎢ ⎢ ⎢ ⎡ a 0 a 1 ⋮ a k ⎦ ⎥ ⎥ ⎥ ⎤ = ⎣ ⎢ ⎢ ⎢ ⎡ y 1 y 2 ⋮ y n ⎦ ⎥ ⎥ ⎥ ⎤ ( 6 )
接着我们的分析
X
A
=
Y
XA=Y
X A = Y
A
=
X
−
1
Y
A=X^{-1}Y
A = X − 1 Y
X
X
X 满秩 ,但是这里可能没有办法满足这一点,所以我们利用广义矩阵可以得到,
A
=
(
X
T
∗
X
)
−
1
∗
X
T
∗
Y
A=(X^{T}*X)^{-1}*X^{T}*Y
A = ( X T ∗ X ) − 1 ∗ X T ∗ Y
A
A
A
clc;
clear;
%录入X轴数据
for a = 1:30
x(a) = a-1;
end
%录入Y轴数据
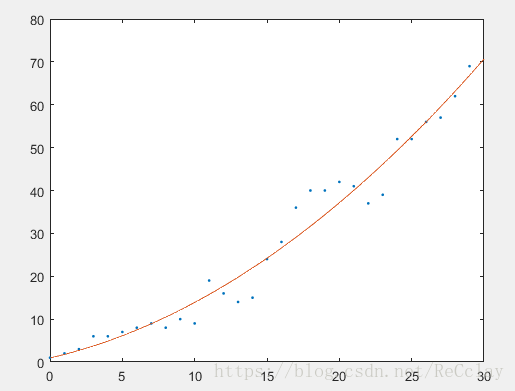
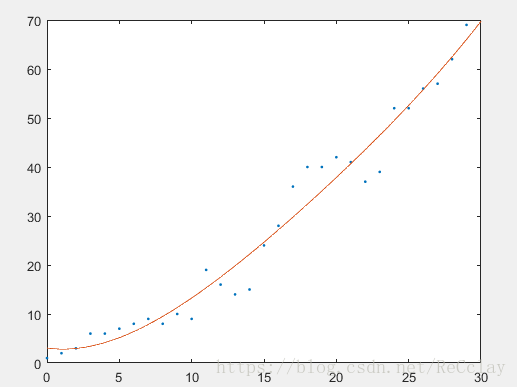
y=[1,2,3,6,6,7,8,9,8,10,9,19,16,14,15,24,28,36,40,40,42,41,37,39,52,52,56,57,62,69];
figure
plot(x,y,'.');%画点
hold on
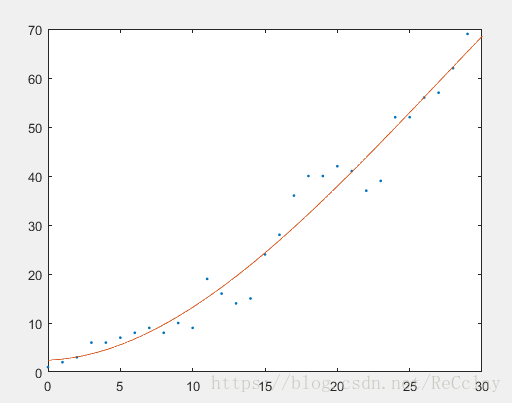
k=5;%阶数 阶数可以在1-5之间更改看效果,记得每次更改了之后clear workspace然后在运行
%X数据录入
for a = 0:k
for i = 1:30
X(i,(a+1)) = x(i).^(a);
end
end
Y = y';
A = (X'*X)^-1*X'*Y;%求矩阵系数A
A = A';%转置矩阵方便使用
z = 0:0.1:30;
if k==5
y1 = A(1)+A(2).*z+A(3).*z.^2+A(4).*z.^3+A(5).*z.^4+A(6).*z.^5;%最后表达式用于绘图
elseif k==4
y1 = A(1)+A(2).*z+A(3).*z.^2+A(4).*z.^3+A(5).*z.^4;%最后表达式用于绘图
elseif k==3
y1 = A(1)+A(2).*z+A(3).*z.^2+A(4).*z.^3;%最后表达式用于绘图
elseif k==2
y1 = A(1)+A(2).*z+A(3).*z.^2;%最后表达式用于绘图
elseif k==1
y1 = A(1)+A(2).*z;%最后表达式用于绘图
end
plot(z,y1);
hold off
k=1
k=2
k=3
k=4
k=5