版权声明:本文为博主原创文章。 https://blog.csdn.net/u012763833/article/details/52605747
1.在二维平面中:如下图所示,在
xoy
平面中有一向量
op⃗=(x,y) T
,旋转
ϕ
角后变为向量
op⃗ ′ =(x ′ ,y ′ ) T
。
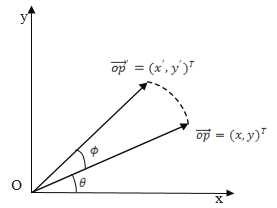
据图可得:
x=|op⃗|cosθ;y=|op⃗|sinθ
,经旋转
ϕ
角后有:
x ′ =|op⃗|cos(θ+ϕ)=|op⃗|(cosθcosϕ−sinθsinϕ)=xcosϕ−ysinϕ
y ′ =|op⃗|sin(θ+ϕ)=|op⃗|(sinθcosϕ+cosθsinϕ)=xsinϕ+ycosϕ;
写成矩阵形式:
(x ′ y ′ )=(cosϕsinϕ −sinϕcosϕ )(xy )
2.在三维空间中:如下图所示,若以坐标系的三个坐标轴X、Y、Z分别作为旋转轴,则点实际上只在垂直坐标轴的平面上作二维旋转。
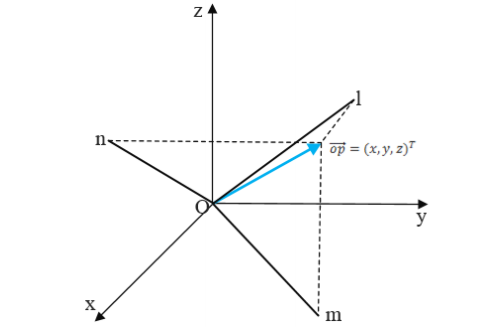
例:
op⃗
绕X轴旋转
ϕ
角,有:
旋转前:
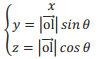
旋转后:

写成矩阵形式:
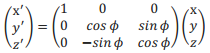
则绕X轴旋ϕ角的旋转矩阵为:
R x (ϕ)=(100 0cosϕ−sinϕ 0sinϕcosϕ )
同理可得绕X、Y、Z轴旋转的不同角度的旋转矩阵(方向余弦矩阵)分别为:

最后,若
op⃗
绕某一定轴旋转,从欧拉定律中可知,绕着固定轴做一个角值的旋转,可以被视为分别以坐标系的三个坐标轴X、Y、Z作为旋转轴的旋转的叠加。