mach-s5pv210\mach-smdkc110.c
/* Maintainer: Kukjin Kim <[email protected]> */
.phys_io = S3C_PA_UART & 0xfff00000,
.io_pg_offst = (((u32)S3C_VA_UART) >> 18) & 0xfffc,
.boot_params = S5P_PA_SDRAM + 0x100,
//.fixup = smdkv210_fixup,
.init_irq = s5pv210_init_irq,
.map_io = smdkc110_map_io,
.init_machine = smdkc110_machine_init,
.timer = &s5p_systimer,
mach-s5pv210\mach-smdkc110.c
static void __init smdkc110_map_io(void)
{
s5p_init_io(NULL, 0, S5P_VA_CHIPID);
s3c24xx_init_clocks(24000000);
s5pv210_gpiolib_init(); //真正的gpiolib初始化
s3c24xx_init_uarts(smdkc110_uartcfgs, ARRAY_SIZE(smdkc110_uartcfgs));
s5p_reserve_bootmem(smdkc110_media_devs, ARRAY_SIZE(smdkc110_media_devs));
s5p_device_rtc.name = "smdkc110-rtc";
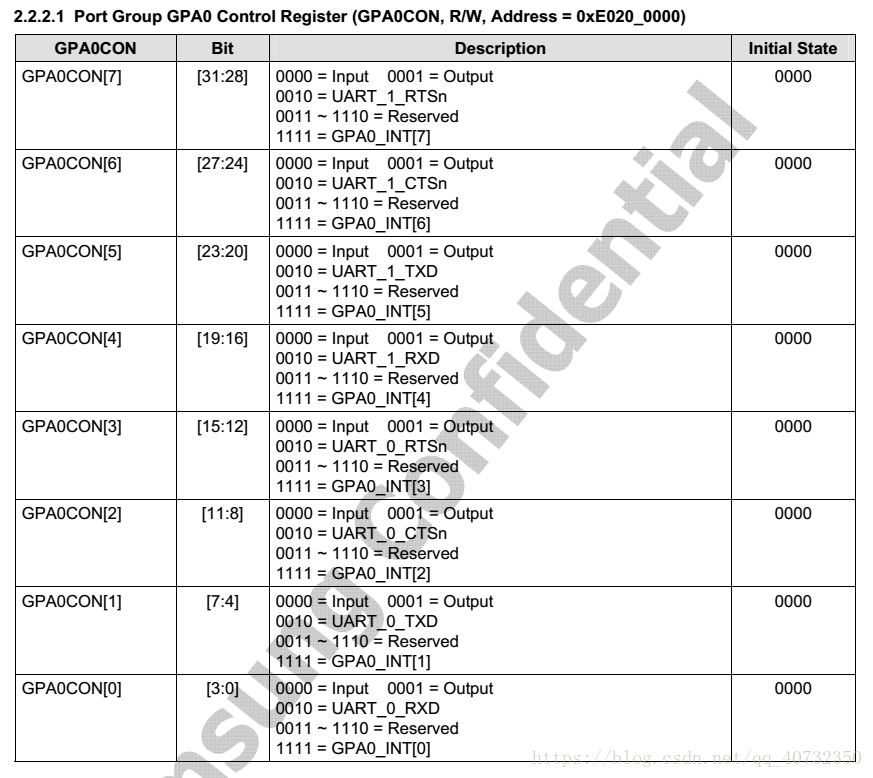
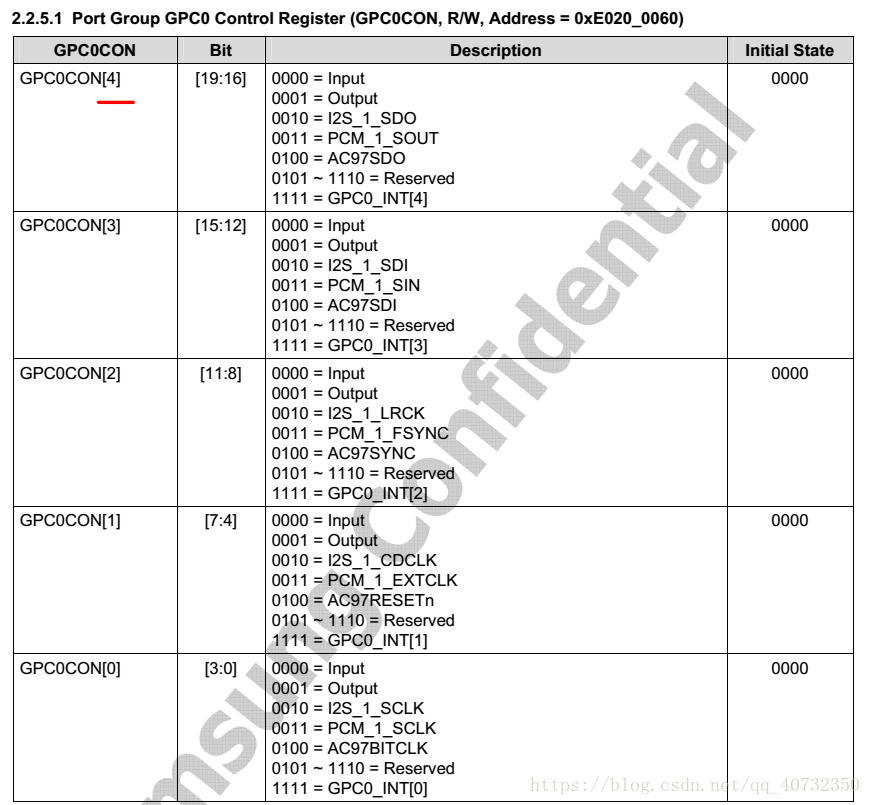
}GPA0称为一个总端口
GPA0CON[1] ---》 GPA0CON[7]为 IO端口
有的总端口有8个IO端口,有的有5个,范围为0 ~ 8
进入真正的初始化***********************************************
第一阶段--------------------------------
mach-s5pv210\gpiolib.c
__init int s5pv210_gpiolib_init(void)
{
struct s3c_gpio_chip *chip = s5pv210_gpio_4bit; //指向已经设置好的结构体数组
int nr_chips = ARRAY_SIZE(s5pv210_gpio_4bit); //算出有多少个GPIO端口,即数组元素个数
int i = 0;
for (i = 0; i < nr_chips; i++, chip++) { //查找每个端口
if (chip->config == NULL)//判断是否指定是否指定config
chip->config = &gpio_cfg;
if (chip->base == NULL)//判断是否指定是否指定基地址
chip->base = S5PV210_BANK_BASE(i);
}
samsung_gpiolib_add_4bit_chips(s5pv210_gpio_4bit, nr_chips);//把数组地址和个数做参数
return 0;
}
重要结构体:
struct s3c_gpio_chip {
struct gpio_chip chip; //通过gpiolib出口的芯片结构
struct s3c_gpio_cfg *config; //特殊功能和拉阻控制信息
struct s3c_gpio_pm *pm;
void __iomem *base; //指向gpio配置寄存器的基地址
int eint_offset;
spinlock_t lock; //锁定这个gpio bank 的独占访问权
#ifdef CONFIG_PM
u32 pm_save[7]; //保存用于暂停/恢复支持的信息
#endif
};struct gpio_chip {
const char *label; //该gpio的名字
struct device *dev; //提供GPIOs的可选设备
struct module *owner; //帮助防止删除导出活动的GPIOs的模块
int (*request)(struct gpio_chip *chip,//申请gpio
unsigned offset);
void (*free)(struct gpio_chip *chip,//释放gpio
unsigned offset);
int (*direction_input)(struct gpio_chip *chip,
unsigned offset);//设置为输入模式
int (*get)(struct gpio_chip *chip,//获取IO值
unsigned offset);
int (*direction_output)(struct gpio_chip *chip,
unsigned offset, int value);//设置为输出模式
int (*set_debounce)(struct gpio_chip *chip,
unsigned offset, unsigned debounce);
void (*set)(struct gpio_chip *chip,//设置IO值
unsigned offset, int value);
int (*to_irq)(struct gpio_chip *chip,
unsigned offset);
//在debugfs中显示内容的可选例程;默认的代码当省略这个时将会使用,但是自定义代码可以显示额外的
//状态(如下拉/下拉配置)
void (*dbg_show)(struct seq_file *s,
struct gpio_chip *chip);
int base;//gpio的端口编号
u16 ngpio;//该端口有多少给IO端口;最后GPIO处理是
//(base+ngpio-1)
const char *const *names; //名字
unsigned can_sleep:1;
unsigned exported:1;
};GPIO的结构体数组
(1)s5pv210_gpio_4bit是一个s3c_gpio_chip类型的结构体数组。
(2)将所有的gpio的.chip结构体中的一些元素初始化,这个数组的所有元素是与数据手册中的所有gpio是一一对应的。
(3)分析可知,这个数组就是对当前MPU中的所有的IO端口和每个端口的IO口进行了统一的描述,有了这个数组, 我们就知道当前开发板有多少个端口,有多少个IO口,以及每个IO口的编号。
static struct s3c_gpio_chip s5pv210_gpio_4bit[] = {
{
.chip = {
.base = S5PV210_GPA0(0),//得到GPIO的编号
.ngpio = S5PV210_GPIO_A0_NR, //得到该GPIO有多少个编号
.label = "GPA0", //指定名字
.to_irq = s5p_gpiolib_gpioint_to_irq,
},
}, {
.chip = {
.base = S5PV210_GPA1(0),
.ngpio = S5PV210_GPIO_A1_NR,
.label = "GPA1",
.to_irq = s5p_gpiolib_gpioint_to_irq,
},
}, {
.base = (S5P_VA_GPIO + 0xC20), //指定虚拟地址
.config = &gpio_cfg_noint, //
.eint_offset = IRQ_EINT(8), //得到中断号
.chip = {
.base = S5PV210_GPH1(0),
.ngpio = S5PV210_GPIO_H1_NR,
.label = "GPH1",
.to_irq = s5p_gpiolib_eint_to_irq,
}
}第二阶段--------------------------------
1. \arch\arm\plat-samsung\gpiolib.c
void __init samsung_gpiolib_add_4bit_chips(struct s3c_gpio_chip *chip,
int nr_chips)
{
for (; nr_chips > 0; nr_chips--, chip++) { //遍历每个数组
samsung_gpiolib_add_4bit(chip); //
s3c_gpiolib_add(chip);
}
}1.1 -------进入samsung_gpiolib_add_4bit
void __init samsung_gpiolib_add_4bit(struct s3c_gpio_chip *chip)
{
chip->chip.direction_input = samsung_gpiolib_4bit_input; //添加输入函数
chip->chip.direction_output = samsung_gpiolib_4bit_output; //添加输出函数
chip->pm = __gpio_pm(&s3c_gpio_pm_4bit); //添加电源管理函数
}1.1.1 -------进入samsung_gpiolib_4bit_input
static int samsung_gpiolib_4bit_input(struct gpio_chip *chip,
unsigned int offset)
{
//to_s3c_gpio通过结构体变量中 某个成员 的首地址进而获得 整个 结构体变量的首地址
struct s3c_gpio_chip *ourchip = to_s3c_gpio(chip);
void __iomem *base = ourchip->base; //指向端口基地址
unsigned long con;
con = __raw_readl(base + GPIOCON_OFF); //得到该CON端口的值
con &= ~(0xf << con_4bit_shift(offset)); //把oxff左移offset*4位
__raw_writel(con, base + GPIOCON_OFF); //写oxff
gpio_dbg("%s: %p: CON now %08lx\n", __func__, base, con);
return 0;
}1.1.2 -------进入samsung_gpiolib_4bit_output
static int samsung_gpiolib_4bit_output(struct gpio_chip *chip,
unsigned int offset, int value)
{
struct s3c_gpio_chip *ourchip = to_s3c_gpio(chip); //转换结构体地址
void __iomem *base = ourchip->base;
unsigned long con;
unsigned long dat;
con = __raw_readl(base + GPIOCON_OFF);
con &= ~(0xf << con_4bit_shift(offset)); //清零
con |= 0x1 << con_4bit_shift(offset); //得到ox1
dat = __raw_readl(base + GPIODAT_OFF); //写ox1
if (value) //判断是关还是开
dat |= 1 << offset;
else
dat &= ~(1 << offset);
__raw_writel(dat, base + GPIODAT_OFF); //把值写到DAT端口
__raw_writel(con, base + GPIOCON_OFF); //把值写到CON端口
__raw_writel(dat, base + GPIODAT_OFF);
gpio_dbg("%s: %p: CON %08lx, DAT %08lx\n", __func__, base, con, dat);
return 0;
}1.2 -------进入s3c_gpiolib_add
\arch\arm\plat-samsung\gpio.c
__init void s3c_gpiolib_add(struct s3c_gpio_chip *chip)
{
struct gpio_chip *gc = &chip->chip;
int ret;
BUG_ON(!chip->base); //检验是不是为空
BUG_ON(!gc->label);
BUG_ON(!gc->ngpio);
spin_lock_init(&chip->lock); //自旋锁初始化
if (!gc->direction_input) //判断为不为空
gc->direction_input = s3c_gpiolib_input;//添加本文件提供的输入函数
if (!gc->direction_output)
gc->direction_output = s3c_gpiolib_output;//添加本文件提供的输出函数
if (!gc->set)
gc->set = s3c_gpiolib_set;//添加本文件提供的设置函数
if (!gc->get)
gc->get = s3c_gpiolib_get;//添加本文件提供的获取函数
#ifdef CONFIG_PM
if (chip->pm != NULL) {
if (!chip->pm->save || !chip->pm->resume)
printk(KERN_ERR "gpio: %s has missing PM functions\n",
gc->label);
} else
printk(KERN_ERR "gpio: %s has no PM function\n", gc->label);
#endif
/* gpiochip_add() prints own failure message on error. */
ret = gpiochip_add(gc); //进入真正的内核添加
if (ret >= 0)
s3c_gpiolib_track(chip); //添加到一个轨迹数组
}
1.2.1 -------进入gpiochip_add
\drivers\gpio\gpiolib.c
int gpiochip_add(struct gpio_chip *chip)
{
unsigned long flags;
int status = 0;
unsigned id;
int base = chip->base;
if ((!gpio_is_valid(base) || !gpio_is_valid(base + chip->ngpio - 1))//基地址和最高编号的
&& base >= 0) { //IO端口不能为空
status = -EINVAL;
goto fail;
}
spin_lock_irqsave(&gpio_lock, flags);//上锁
if (base < 0) {
base = gpiochip_find_base(chip->ngpio);
if (base < 0) {
status = base;
goto unlock;
}
chip->base = base;
}
/* these GPIO numbers must not be managed by another gpio_chip */
for (id = base; id < base + chip->ngpio; id++) {
if (gpio_desc[id].chip != NULL) {
status = -EBUSY;
break;
}
}
if (status == 0) {
for (id = base; id < base + chip->ngpio; id++) {
gpio_desc[id].chip = chip; //在gpio设备数组中添加端口
/* REVISIT: most hardware initializes GPIOs as
* inputs (often with pullups enabled) so power
* usage is minimized. Linux code should set the
* gpio direction first thing; but until it does,
* we may expose the wrong direction in sysfs.
*/
gpio_desc[id].flags = !chip->direction_input
? (1 << FLAG_IS_OUT)
: 0;
}
}
unlock:
spin_unlock_irqrestore(&gpio_lock, flags);
if (status == 0)
status = gpiochip_export(chip);
fail:
/* failures here can mean systems won't boot... */
if (status)
pr_err("gpiochip_add: gpios %d..%d (%s) failed to register\n",
chip->base, chip->base + chip->ngpio - 1,
chip->label ? : "generic");
return status;
}1.2.1 -------进入s3c_gpiolib_track
\arch\arm\plat-samsung\gpio.c
static __init void s3c_gpiolib_track(struct s3c_gpio_chip *chip)
{
unsigned int gpn;
int i;
gpn = chip->chip.base;//指向基地址
for (i = 0; i < chip->chip.ngpio; i++, gpn++) {
BUG_ON(gpn >= ARRAY_SIZE(s3c_gpios));
s3c_gpios[gpn] = chip;
}
}第三阶段--------------------------------如何用gpiolib 框架
drivers/gpio/gpiolib.c 这个文件中所有的函数构成了内核开发者写的gpiolib框架部分。
这个文件中提供的函数主要有以下部分:
gpiochip_add: 添加gpio端口
是框架开出来的接口,给厂商驱动工程师用,用于向内核注册我们的gpio端口
gpiochip_remove:删除gpio端口
用于内核删除gpio端口
gpio_request: 使用申请
是框架开出来的接口,给使用gpiolib来编写自己的驱动的驱动工程师用的,驱动中要想使用某一个gpio,就必须先调用gpio_request接口来向内核的gpiolib部分使用申请,得到允许后才可以去使用这个gpio。
gpio_free: 释放申请
对应gpio_request,用来释放申请后用完了的gpio
gpio_request_one/gpio_request_array:
这两个是gpio_request的变种
gpiochip_is_requested: 判断
接口用来判断某一个gpio是否已经被申请了
gpio_direction_input/gpio_direction_output:
接口用来设置GPIO为输入/输出模式,
注意:
该函数内部实际并没有对硬件进行操作,只是通过chip结构体变量的函数指针调用了将来SoC厂商的驱动工程师写的真正的操作硬件实现gpio设置成输出模式的那个函数。
以上的接口属于一类,这些都是给写其他驱动并且用到了gpiolib的人使用的