完成样子
因为只是学习验证,没用电烙铁,只用了面包板来连接各个组件,中间用扎带固定(不稳定)
完成后能基本保持平衡,但太大力去推容易倒


平衡原理
通过负反馈实现平衡,车体会在轮子滚动的方向上发生倾斜。控制轮子转动,抵消在一个维度上倾斜的趋势便可以保持车体平衡了。根据这个原理,通过测量小车的倾角和倾角速度控制小车车轮的加速度来消除小车的倾角。因此,小车倾角以及倾角速度的测量成为控制小车直立的关键,因此使用了测量倾角和倾角速度的集成传感器陀螺仪-MPU6050。
实现细节
这是用fritzing画的Arduino与TB6612FNG电机驱动模块 和 MPU6050 模块之间的电路连接

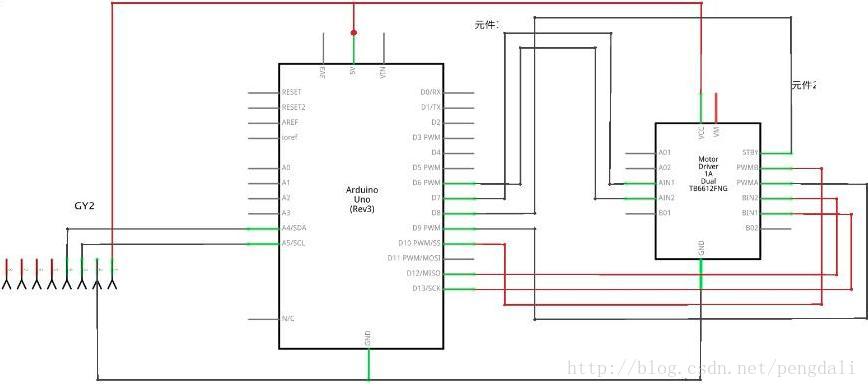
供电部分
电机驱动模块TB6612FNG的VM必须要接上12v不然电机供电不足,这里用了3个18650供电,通过LM2596S变压为5v给Arduino供电
电机部分
使用的是GB37-520电机,减速比为 1:30,带霍尔传感器测速码盘
1--- --电机电源线 AO1
2--- --电机电源线 AO2
3--- --传感器信号线 负电 GND
4--- --传感器 正电 5V VCC
5--- --传感器信号线 B 相
6--- --传感器信号线 A 相
2--- --电机电源线 AO2
3--- --传感器信号线 负电 GND
4--- --传感器 正电 5V VCC
5--- --传感器信号线 B 相
6--- --传感器信号线 A 相