在使用AS5048A的过程中出现的问题,分享一下,大家共勉!
1. SPI读取寄存器没有数据输出
根据数据手册SPI时序,如下
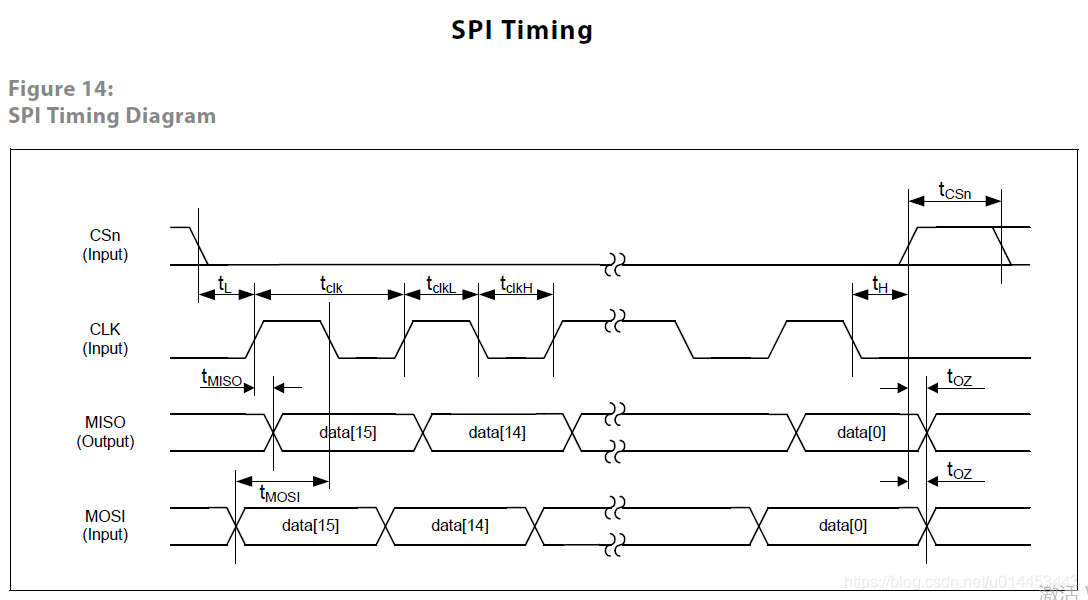
可知SPI工作在模式1,CLK的闲时为低电平,第二个沿采样数据,16位,SPI初始化如下:HAL库
//SPI¿Ú³õʼ»¯
//ÕâÀïÕëÊǶÔSPI3µÄ³õʼ»¯
void SPI3_Init(void)
{
SPI3_Handler.Instance=SPI3; //SP3
SPI3_Handler.Init.Mode=SPI_MODE_MASTER; //ÉèÖÃSPI¹¤×÷ģʽ£¬ÉèÖÃΪÖ÷ģʽ
SPI3_Handler.Init.Direction=SPI_DIRECTION_2LINES; //ÉèÖÃSPIµ¥Ïò»òÕßË«ÏòµÄÊý¾Ýģʽ:SPIÉèÖÃΪ˫Ïßģʽ
SPI3_Handler.Init.DataSize=SPI_DATASIZE_16BIT; //ÉèÖÃSPIµÄÊý¾Ý´óС:SPI·¢ËͽÓÊÕ8λ֡½á¹¹
SPI3_Handler.Init.CLKPolarity=SPI_POLARITY_LOW; //´®ÐÐͬ²½Ê±ÖӵĿÕÏÐ״̬Ϊ¸ßµçƽ
SPI3_Handler.Init.CLKPhase=SPI_PHASE_2EDGE; //´®ÐÐͬ²½Ê±Öӵĵڶþ¸öÌø±äÑØ£¨ÉÏÉý»òϽµ£©Êý¾Ý±»²ÉÑù
SPI3_Handler.Init.NSS=SPI_NSS_SOFT; //NSSÐźÅÓÉÓ²¼þ£¨NSS¹Ü½Å£©»¹ÊÇÈí¼þ£¨Ê¹ÓÃSSI룩¹ÜÀí:ÄÚ²¿NSSÐźÅÓÐSSIλ¿ØÖÆ
SPI3_Handler.Init.BaudRatePrescaler=SPI_BAUDRATEPRESCALER_8;//¶¨Ò岨ÌØÂÊÔ¤·ÖƵµÄÖµ:²¨ÌØÂÊÔ¤·ÖƵֵΪ256
SPI3_Handler.Init.FirstBit=SPI_FIRSTBIT_MSB; //Ö¸¶¨Êý¾Ý´«Êä´ÓMSBλ»¹ÊÇLSBλ¿ªÊ¼:Êý¾Ý´«Êä´ÓMSBλ¿ªÊ¼
SPI3_Handler.Init.TIMode=SPI_TIMODE_DISABLE; //¹Ø±ÕTIģʽ
SPI3_Handler.Init.CRCCalculation=SPI_CRCCALCULATION_DISABLE;//¹Ø±ÕÓ²¼þCRCУÑé
SPI3_Handler.Init.CRCPolynomial=7; //CRCÖµ¼ÆËãµÄ¶àÏîʽ
HAL_SPI_Init(&SPI3_Handler);//³õʼ»¯
__HAL_SPI_ENABLE(&SPI3_Handler); //ʹÄÜSPI5
}HAL_SPI_MspInit代码如下:
__HAL_RCC_GPIOC_CLK_ENABLE(); //ʹÄÜGPIOCʱÖÓ
__HAL_RCC_SPI3_CLK_ENABLE(); //ʹÄÜSPI3ʱÖÓ
//PC10-SPI3_SCK,11,12
GPIO_Initure.Pin=GPIO_PIN_10|GPIO_PIN_11|GPIO_PIN_12;
GPIO_Initure.Mode=GPIO_MODE_AF_PP; //¸´ÓÃÍÆÍìÊä³ö
GPIO_Initure.Pull=GPIO_PULLUP; //ÉÏÀ
GPIO_Initure.Speed=GPIO_SPEED_HIGH; //¿ìËÙ
GPIO_Initure.Alternate=GPIO_AF6_SPI3; //¸´ÓÃΪSPI3
HAL_GPIO_Init(GPIOC,&GPIO_Initure);读取AS5048A寄存器的代码如下:
//¶ÁÈ¡³É¹¦·µ»Ø0£¬¶Áȡʧ°Ü·µ»Ø1
static AS5048A_Status AS5048A_Read_Reg(u16 reg,u16 *rdata)
{
u16 data;
__AS5048A2_CS_ENABLE();
/********·¢ËÍÒ»¸ö¶ÁÈ¡¼Ä´æÆ÷Ö¸Áî********************/
reg &=~(1 << AS5048A_CMD_RW_BIT);
reg |= (AS5048A_CMD_READ << AS5048A_CMD_RW_BIT);
SPI3_ReadWriteByte(reg);
/********·¢ËÍÒ»¸ö¿ÕÖ¸Áî¶ÁÈ¡Éϴνá¹û*****************/
data = SPI3_ReadWriteByte(AS5048A_CMD_NOP);
/*********¼ì²âÊÇ·ñÓдíÎó·¢Éú************************/
if(data & AS5048A_CMD_EF_MASK)return ReadErr;
*rdata = (data & AS5048A_REC_DATA_MASK);
__AS5048A2_CS_DISABLE();
return ERR_OK;
}通过调试发现,无论reg是什么,第一次SPI3_ReadWriteByte(reg);返回的数值始终是0,这可以理解,
第二次data = SPI3_ReadWriteByte(AS5048A_CMD_NOP);返回的值竟然是第一次发送的值,
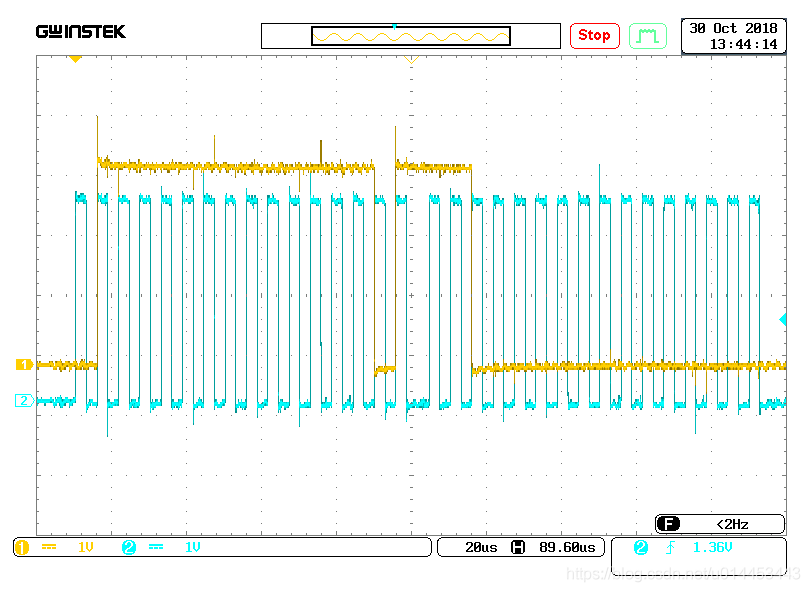
多次实验reg,始终如此,百思不得姐,以为SPI发送的数据有问题,用示波器抓图像数据,如下:
发送数据0X7FFD,0XC000波形如下,从波形分析数据是正确的
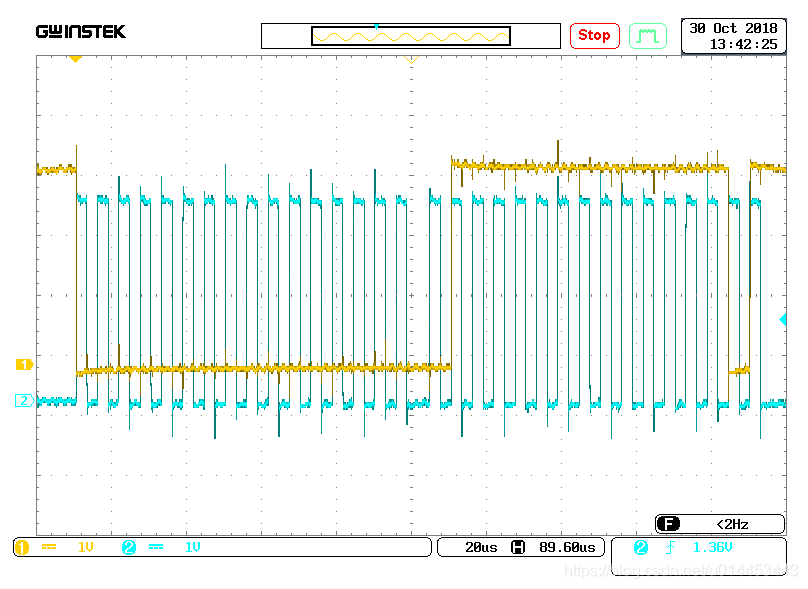
接收数据为0x0000,0x7FFD,数据与波形都是正确的,接收波形如下:
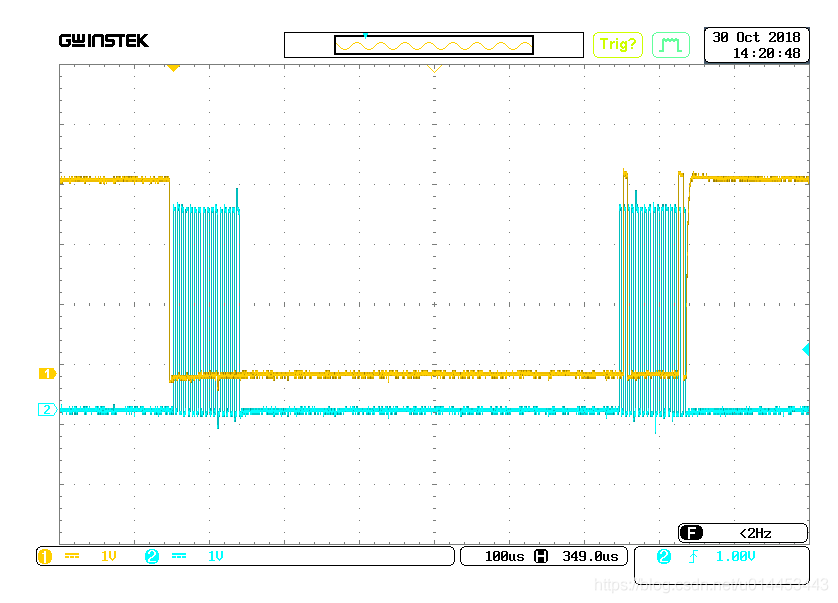
接收数据,发送数据都正确啊啊,为什么返回数据就是不正确呢,难道是CS片选信号没有选中吗,还是两帧数据的间隔时间太短,于是加大间隔,用示波器抓CS信号,也没有发现什么问题啊,波形如下:
查阅手册,难道是没有奇偶校验?
于是添加 奇偶校验位上去,结果还是一样的效果,不起作用,奇偶校验算法如下:
// Calculates even parity of 16it value, returns 1 (odd) or 0 (even)
static u8 parity_even(u16 value)
{
u8 cnt = 0;
u8 i;
for (i = 0; i < 16 ; i++)
{
if (value & 0x1 ) cnt++;
value >>= 1 ;
}
return cnt & 0x1 ;
}
//校验算法添加
regaddr = AS5048A_CMD_READ | reg;
regaddr |=((u16)parity_even(regaddr) << AS5048A_PARITY_BIT);
data = SPI3_ReadWriteByte(regaddr);搞了2天,实在搞不清楚,还以为片子坏了,打算换片子,然后拿示波器勾一下AS5048A的PWM引脚,确实有PWM波形输出啊,看来不是片子问题,冷静下来,再仔细查阅AS5048A用户手册的SPI接口,发现有一句话如下:
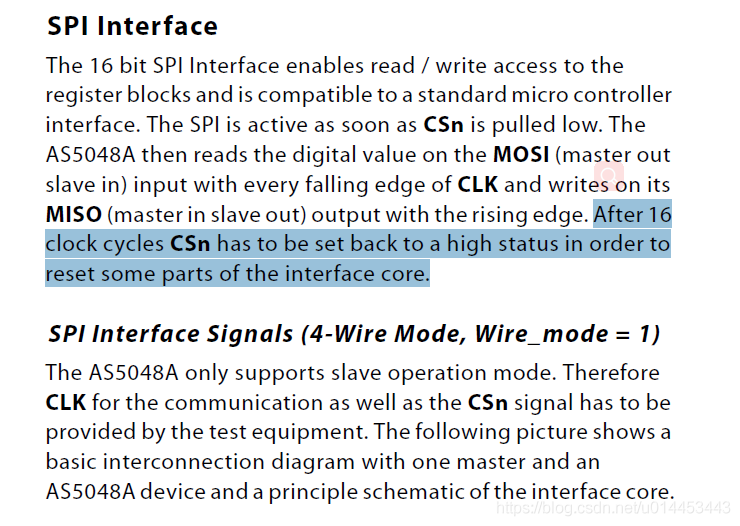
也就是说16个时钟之后,CSn必须设置为高电平状态,为了复位接口内核的一些部分,于是尝试修改CS,在每次使用SPI的
SPI3_ReadWriteByte(reg);读写数据之前使能CS=0,写完SPI之后CS=1,果然可以正常工作了,能正确的读到数据了,完整的读写代码如下:
//¶ÁÈ¡³É¹¦·µ»Ø0£¬¶Áȡʧ°Ü·µ»Ø1
static AS5048A_Status AS5048A_Read_Reg(AS5048A num,u16 reg,u16 *rdata)
{
u16 data = 0,regaddr = 0;
/********·¢ËÍÒ»¸ö¶ÁÈ¡¼Ä´æÆ÷Ö¸Áî********************/
AS5048A_CS_ENABLE(num);
regaddr = AS5048A_CMD_READ | reg;
regaddr |=((u16)parity_even(regaddr) << AS5048A_PARITY_BIT);
data = SPI3_ReadWriteByte(regaddr);
AS5048A_CS_DISABLE(num);
delay_us(2);
/********·¢ËÍÒ»¸ö¿ÕÖ¸Áî¶ÁÈ¡Éϴνá¹û*****************/
AS5048A_CS_ENABLE(num);
regaddr = AS5048A_CMD_NOP;
data = SPI3_ReadWriteByte(regaddr);
AS5048A_CS_DISABLE(num);
/*********¼ì²âÊÇ·ñÓдíÎó·¢Éú************************/
if(data & AS5048A_CMD_EF_MASK)
{
delay_us(2);
// AS5048A_CS_ENABLE(num);
// regaddr = AS5048A_CMD_READ | AS5048A_CMD_CLR_EF;
// regaddr |=((u16)parity_even(regaddr) << AS5048A_PARITY_BIT);
// data = SPI3_ReadWriteByte(regaddr);
// AS5048A_CS_DISABLE(num);
return ReadErr;
}
*rdata = (data & AS5048A_REC_DATA_MASK);
return ERR_OK;
}另外要注意的地方就是,连续两次使用SPI3_ReadWriteByte(reg);的时候,中间一定要加一定的的延时,给AS5048A做应答反应的时间,不然仍然读不到有效数据
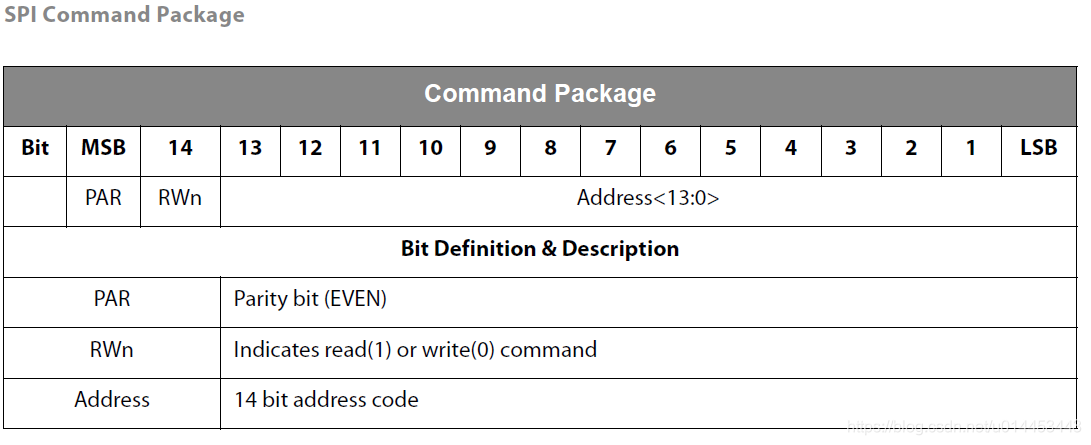
2. AS5048A寄存器内容分析
寄存器内容如下:
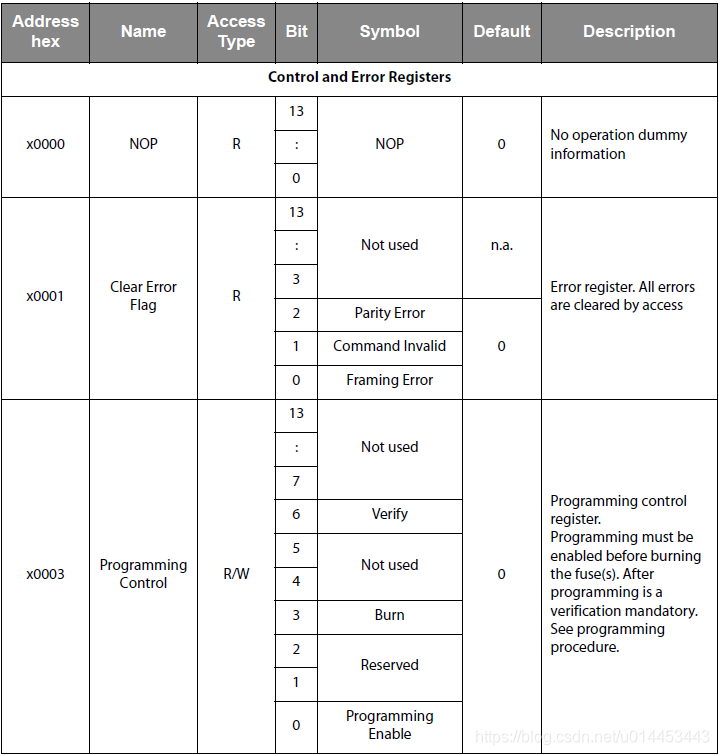
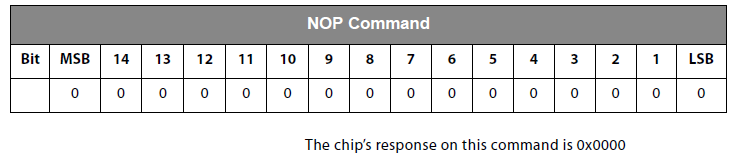
第一个nop 寄存器,没什么用,读的话始终是0,不需要管,发送nop指令时,数据如下,就发0就可以了:
第二个错误标识寄存器,当接收的数据帧位有错误时,读取该寄存器,可以知道具体发生了什么错误
第三个编程控制寄存器,该寄存器是针对OTP(一次编程寄存器)进行控制的,对于OTP,改变它的值之后,使用该寄存器的burn的位烧入之后,OTP的值就无法再改变了,要慎重使用
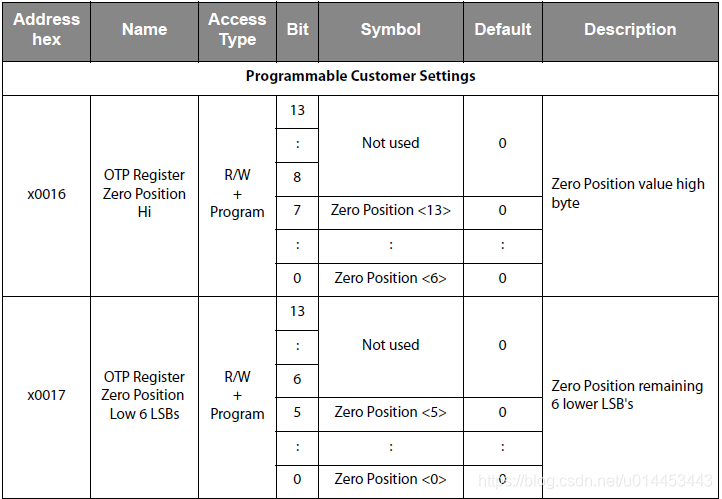
上面这两个就是OTP零位寄存器,通过设置该寄存器可以设置编码器0位的数据,这2个寄存器可以重复设置
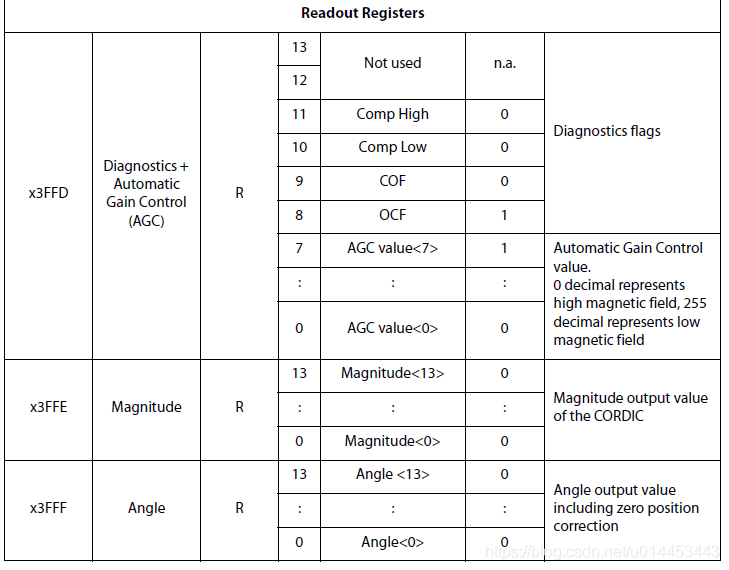
0X3FFD是诊断+自动增益寄存器,OCF是Offset Compensation Finished,偏移补偿完成,新的AS5048A芯片,该为肯定是0,也就是还没有进行偏移补偿,一旦接触到磁头,该位会自动设置为1,而且之后每次开机该位都为1,可以利用该位为1还是0来检测AS5048A的好坏;COF (CORDIC Overflow) 高电平表示CORDIC 部分范围错误. 当这一位被设置时,角度和磁场强度的数据是不可用的,输出的数值是上一次可用的数值。COMP low为1,表明磁场强度高,COMP high为1时,表明磁场强度低
0X3FFE是磁场寄存器,可以读到磁场的强度,磁头在芯片正上方时,可以达到4728,没有磁头时,强度大概在10以内
AS5048A芯片上电,没有磁头时,0X3FFD的数值是2303,二进制 1000 1111 1111 表示没有偏移补偿,磁场强度极低
有磁头时,OCF基本上为1,0X3FFD的数值在400左右!