版权声明:本文为博主原创文章,转载请注明出处。 https://blog.csdn.net/u014421520/article/details/83001948
1.问题描述
最近开发中需要使用can传输float和short型数据,我们知道一般的嵌入式平台的通讯端口如CAN、串口、网络等都是以字节(byte)为单位传输的,那么怎么传输float、short等类型的数据呢?尤其是带符号位的数据。
2.解决思路
使用共用体(union)
首先创建一个结构体,然后在结构体成员中创建共用体。如下所示:
//底盘状态结构体
typedef struct _T_UnderPanState
{
uint32_t TimeStopCount; //运动停止计时
bool TimeCountFlag; //开始运动计数标志
bool TimeStopCountFlag; //运动停止计时标志
int16_t GetLeftSpeed; //左轮反馈速度
int16_t GetRightSpeed; //右轮反馈速度
float InitDenc[3]; //起始编码器位置
union
{
int16_t MotorSpeed; //电机转速
uint8_t ucMotorSpeed[2];
};
union
{
uint32_t TimeCount; //运动时间计数
uint8_t ucTimeCount[4];
};
union
{
float Distance; //运动距离 mm
uint8_t ucDistance[4];
};
union
{
float Angle; //转动角度
uint8_t ucAngle[4];
};
union
{
float VxMMPS; //直线运动速度 mm/s
uint8_t ucVxMMPS[4];
};
union
{
float OmegaRPM; //旋转速度
uint8_t ucOmegaRPM[4];
};
}T_UnderPanState;
extern T_UnderPanState UnderPanState;
这么做的好处就是在运算的时候,我们可以直接使用float型数据做运算,然后在传输的时候,使用uint8_t类型的数组传输,在接收端,同样定义一个这样的结构体,使用uint8_t类型的数组接收数据,然后使用float型的变量做运算,这样不但节省了内存,而且跨平台,通用性好。
接下来贴一个我的打包发送代码片段,大家体会一下。
memcpy(&wifimesstemp[0], UnderPanState.ucMotorSpeed, 2);
memcpy(&wifimesstemp[2], UnderPanState.ucTimeCount, 4);
memcpy(&wifimesstemp[6], UnderPanState.ucDistance, 4);
memcpy(&wifimesstemp[10], UnderPanState.ucAngle, 4);
memcpy(&wifimesstemp[14], UnderPanState.ucVxMMPS, 4);
memcpy(&wifimesstemp[18], UnderPanState.ucOmegaRPM, 4);
WifiMsgPack(23, APP_GET_UNDERPAN_STATE_BACK, wifimesstemp,TRUE,&WifiTcpMessage);
在接收端的处理非常简单:
我们先定义一个同发送端一样的结构体:
//底盘状态结构体
typedef struct _T_TestUnderPanState
{
int16_t MotorSpeed; //电机转速
uint32_t TimeCount; //运动时间计数
float Distance; //运动距离 mm
float Angle; //转动角度
float VxMMPS; //直线运动速度 mm/s
float OmegaRPM; //旋转速度
}T_TestUnderPanState;
然后直接拷贝数据到该结构体中:
//模拟发送部分
memcpy(&temp[0], UnderPanState.ucMotorSpeed, 2);
memcpy(&temp[2], UnderPanState.ucTimeCount, 4);
memcpy(&temp[6], UnderPanState.ucDistance, 4);
memcpy(&temp[10], UnderPanState.ucAngle, 4);
memcpy(&temp[14], UnderPanState.ucVxMMPS, 4);
memcpy(&temp[18], UnderPanState.ucOmegaRPM, 4);
//假设我们收到的数据存在temp数组中
memcpy((uint8_t *)(&TestUnderPanState.MotorSpeed), temp, 22); //接收
是不是使用起来非常方便。
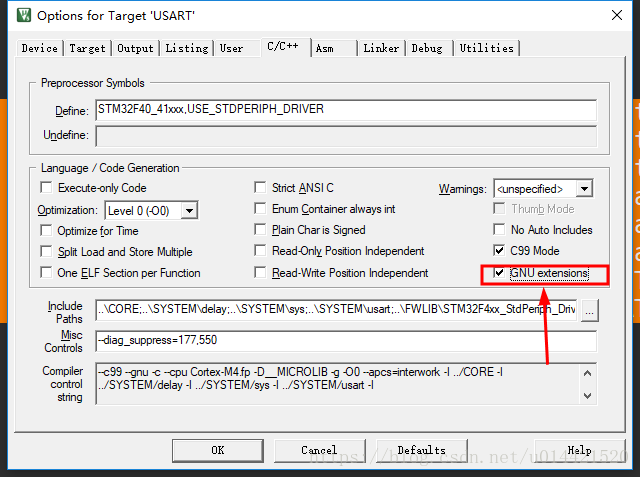
在keil中这样定义一个无名union的时候记得要勾选上 GNU extensios,如下图,否则会报错。