[问题由来]
在计算铁磁材料多晶体的有效模量时,需要考虑晶粒在多晶体中的方向分布,一般用三个欧拉角(,
,
)来表示晶粒在多晶体中的方向,用方向分布函数
来表示某个方向的分布密度。基于此,迫使我要掌握欧拉角,但是在阅读众多教材和博客文章中发现,大家对欧拉角的说法不是很统一,所以,基于我的理解整一下欧拉角的相关概念及使用注意事项。
一、几个概念
1.1经典欧拉角(Proper Euler angles)和泰勒布莱恩角(Tait-Bryan angles)
这两种欧拉角是按照旋转轴的顺序定义的,经典欧拉角是按照Z-X-Z,Y-X-Y,X-Y-X,Z-Y-Z,X-Z-X,Y-Z-Y这样的轴序旋转,即第一个旋转轴和最后一个旋转轴相同;而泰勒布莱恩角是按照X-Y-Z,Y-Z-X,Z-X-Y,X-Z-Y,Z-Y-X,Y-X-Z这样的轴序旋转,即每次旋转轴都不相同。
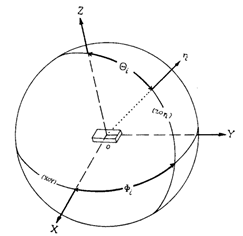
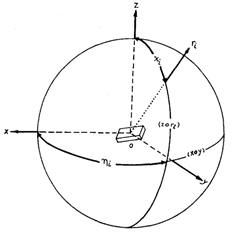
1.2内在旋转(intrinsic rotations)和外在旋转(extrinsic rotations)
这两个概念通过下图进行说明:即内在旋转每次旋转围绕的轴是上次旋转之后坐标系的某个轴,外在旋转每次旋转的轴是固定坐标系中的轴。


内在旋转与外在旋转的转换关系:互换第一次和第三次旋转的位置则两者结果相同。例如Z-Y-X旋转和内部旋转和X-Y-Z旋转的外部旋转的旋转矩阵相同。
1.3旋转矩阵(很重要)
主动旋转和被动旋转:主动旋转是指将向量或坐标系逆时针围绕旋转轴旋转,被动选是对坐标轴进行的逆时针旋转,相当于主动旋转的逆操作。
旋转矩阵有二维旋转和三维旋转,研究需要这里仅讨论三维旋转(被动旋转)。

假设OP为单位矢量且在XY平面内,则OP矢量在O-XYZ坐标系中坐标为,在新坐标系O-X’Y’Z’中的坐标为
,展开之后为
,写成矩阵的形式如下:
将上式中的3*3的变换矩阵称为旋转矩阵。从Fig. 3中可以看出,被动旋转相当于将矢量OP绕Z轴主动顺时针旋转θ角。
同理,可以得到绕X轴和绕Y轴被动旋转的旋转矩阵,如下所示:
,
相应的矢量绕坐标轴主动旋转的旋转矩阵如下所示:
,
,
二、举例计算

计算旋转矩阵一定要明确旋转顺序和旋转模式(内在旋转还是外在旋转,主动旋转还是被动旋转),由于内在旋转易于图解表达,通常使用内在旋转说明。如图4所示,旋转顺序为Z-X-Z的被动内在旋转。假设矢量OP在O-xyz坐标系中的坐标为OP0=(x, y, z),在O-XYZ坐标系中的坐标为OP=(X, Y, Z),分解计算步骤如下:
- 绕Z轴旋转之后的坐标为
;
- 绕第一次旋转之后的X坐标旋转之后的坐标为
;
- 绕第二次旋转之后的Z坐标旋转之后的坐标为
;
可以得到OP矢量在新坐标系中的坐标与在旧坐标系中的坐标之间的关系为 ,所以总的旋转矩阵为
,采用Matlab的符号计算可以得到该旋转矩阵的展开形式。为了便于Matlab中书写,令
,
,
。
Matlab代码:
syms a b c
Rza = [cos(a) sin(a) 0;-sin(a) cos(a) 0;0 0 1];
Rxb = [1 0 0;0 cos(b) sin(b);0 -sin(b) cos(b)];
Rzc = [cos(c) sin(c) 0;-sin(c) cos(c) 0;0 0 1];
T = Rzc*Rxb*Rza;
disp(T);
计算结果:
[ cos(a)*cos(c) - cos(b)*sin(a)*sin(c), cos(c)*sin(a) + cos(a)*cos(b)*sin(c), sin(b)*sin(c)]
[-cos(a)*sin(c) - cos(b)*cos(c)*sin(a), cos(a)*cos(b)*cos(c) - sin(a)*sin(c), cos(c)*sin(b)]
[ sin(a)*sin(b), -cos(a)*sin(b), cos(b)]
三、在晶体织构学中的应用

根据欧拉角,可以得到旋转矩阵为:
|
|
根据旋转变换,则有如下公式:
进而,得到晶粒坐标系C中的矢量在试样坐标系S中的表达:
假设所有晶粒在试样中的方向分布函数(ODF)为,而且有
,多晶体中常计算等效弹性刚度张量(四阶张量),所以得出,一个在试样坐标系S中的四阶张量
能够从晶粒坐标系C中的
计算得到,
四阶张量的体积平均变成取向平均,计算方法如下:
四、由旋转前后的向量值计算旋转矩阵(扩展)
- 两个向量点乘计算夹角;
- 两个向量叉乘计算旋转轴;
- 利用罗德里格旋转公式(Rodrigues' rotation formula)计算旋转矩阵;
这不详细内容和计算步骤以及程序见参考资料4.
致谢
感谢所有参考的博客作者!
参考资料
1. 欧拉角维基百科定义https://en.wikipedia.org/wiki/Euler_angles
2. 旋转矩阵博客https://www.cnblogs.com/meteoric_cry/p/7987548.html
3. 内外旋转矩阵博客
4. 根据前后向量计算旋转矩阵https://www.cnblogs.com/xpvincent/archive/2013/02/15/2912836.html