版权声明:本文为博主原创文章,未经博主允许不得转载。 https://blog.csdn.net/u010712012/article/details/84557616
为了检测车辆非法占用应急停车道,不管是在应急车道上停车还是行驶,普通车辆都是不允许的,那么这个检测的逻辑流程是什么呢?
首先我们肯定需要去进行车辆检测和车辆跟踪,才知道是同一辆车,因为无人机巡航飞行,背景是运动的,所以检测算法用的多的有ViBe和CNN中的SSD,YOLO等,跟踪算法有camshift,meanshift,Kalman滤波器,这里再分析选择哪一个。
之后需要进行车道线检测,才能判断哪里是应急车道,常用的车道线检测有:Hough变换,漫水填充识别车道,还有CNN去搞。
判断车辆是否在应急车道内,这个还没想好,可以用像素点阈值之差?
车辆尾部两侧检查尾灯的位置,第一种可以用Sobel算子找到车尾的矩形,在利用一次sobel算子计算得到尾灯位置;第二种是HSV颜色空间分割和RGB模型地融合,如果是运动情况,尾灯可能还要进行跟踪,这里用Kalman滤波器就可以了。
而我们不仅要判断车尾灯的位置,还要看是否是亮的黄灯,这里用H,S,V的分量直方图去反映是否亮黄灯。
假设t’时刻亮的是黄灯,那么根据 https://blog.csdn.net/u010712012/article/details/84454590
上次写的思路来检测下一个或两个时刻的时候是否还亮着黄灯,这个频率间隔设为
(假设亮灯时间为t),没亮就说明是双闪灯,或者再来循环一下以确定不是司机关掉了。如果亮了说明不是双闪灯,为非法占用应急车道,进而需要识别车牌。
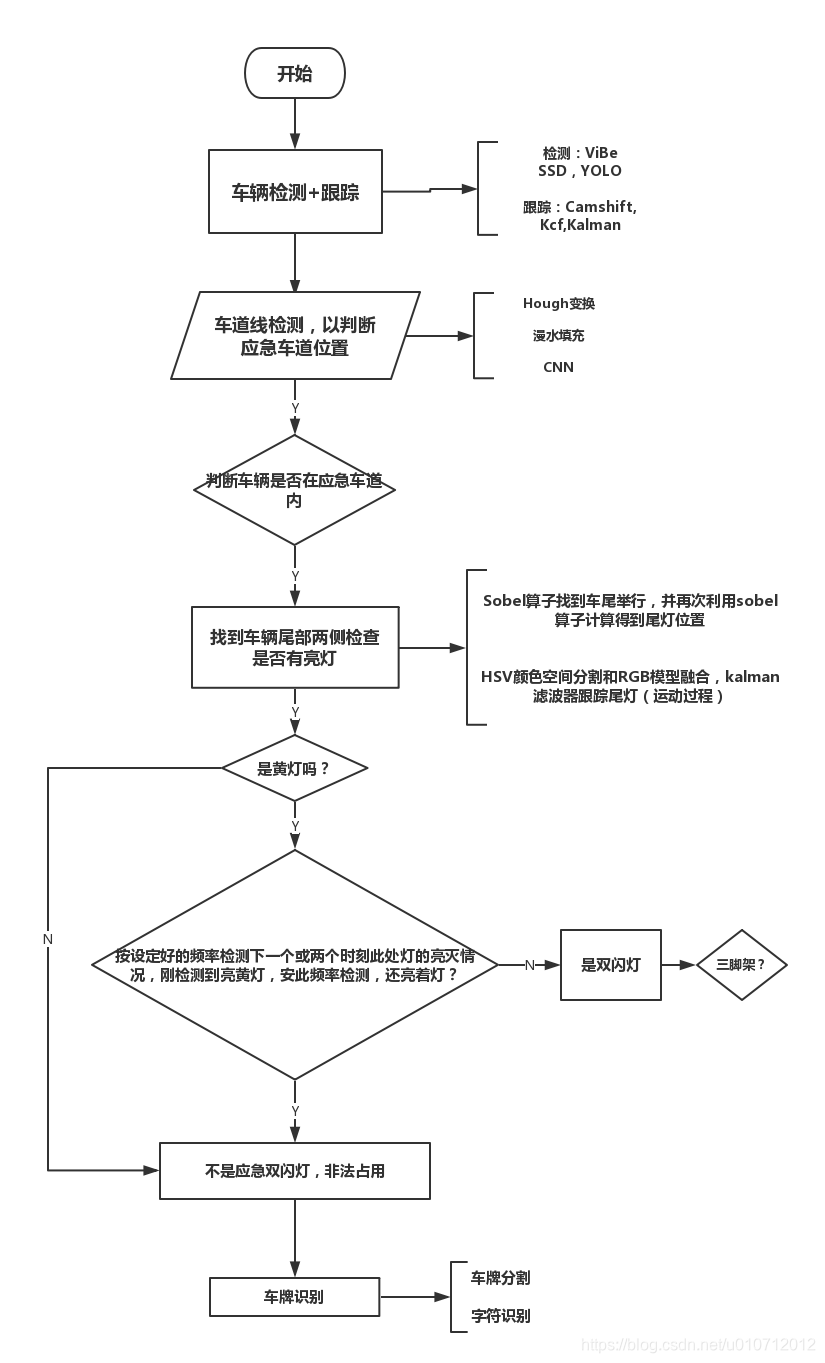
以上是流程图,下次进行细致分模块进行分析。