版权声明:本文为博主原创文章,未经博主允许不得转载。 https://blog.csdn.net/lwz45698752/article/details/84785005
- 力传感器最初用于两个形状之间的刚性连接,能够测量两者间传递的力和扭矩。
 - Force sensor object (green) measuring the force and torque exerted by a beam (blue) anchored in a wall (red)
- Force sensor object (green) measuring the force and torque exerted by a beam (blue) anchored in a wall (red) - 力传感器的刚度是有条件的,存在阈值,超出则broken,阈值可自己设定
- 力传感器要想运行,要enable 动力学属性
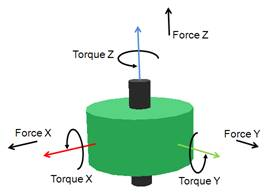
- 力传感器测量6个值,如下图
- 关节也能测量力或力矩,但只能测量关节的Z轴方向
力传感器属性设置

- Filter: when force or torque data is acquired by the force sensor, then it is accumulated and can be filtered (可对其累加和滤波)in order to obtain less jittery values(获得较少的抖动值).
- Sample size: the number of values that should be used for the filter. (用于filter的值的数目)1 will not filter values (raw output).
- Average value(平均值): if selected, then the force sensor will deliver average values (average of sample size values).
- Median value(中值): if selected, then the force sensor will deliver median values (median of sample size values).
- Breaking settings(自定义行为,即设置一些自动break的条件和行为。): this section allows to set-up some automatic breaking conditions and behavior for a force sensor. Alternatively, the user can programmatically handle breaking conditions and behavior by accessing the appropriate API functions.
- Force threshold: the amplitude of the force vector that triggers a threshold violation.
- Torque threshold: the amplitude of the torque vector that triggers a threshold violation
- Consecutive threshold violations for breaking: the number of consecutive times the sensor is allowed to violate a threshold before breaking.
- Object size: size of the sensor’s 3D representation. This has no functional effect.
- Adjust color A / B: allows adjusting the two colors of a force sensor.