For perspective transformation, you need a 3x3 transformation matrix. Straight lines will remain straight even after the transformation. To find this transformation matrix, you need 4 points on the input image and corresponding points on the output image. Among these 4 points,3 of them should not be collinear.
透视变换(perspective transformation)是将图像投影到一个新的视平面,也称为投影映射。
公式:dst(x,y) = src((M11x+M12y+M13)/(M31x+M32y+M33), (M21x+M22y+M23)/(M31x+M32y+M33))
仿射变换与透视变换的区别:
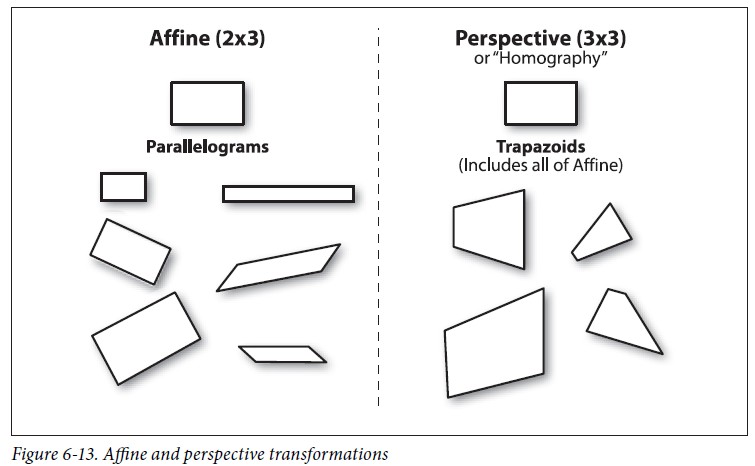
(1)、仿射变换,它可以将矩形转换成平行四边形,也可以将矩形的边压扁但必须保持边是平行的,也可以将矩形旋转或者按比例缩放。透视变换除了能够处理仿射变换的操作外,还可以将矩形转换成梯形。即仿射变换后还是平行四边形,透视变换后是四边形。因此可以说仿射变换是透视变换的一个子集。
(2)、在OpenCV中,基于2*3矩阵进行的变换,是图像的仿射变换;基于3*3矩阵进行的变换,是图像的透视变换或者单应性映射。图像透视变换多用于图像校正
下图是截取的《Learning OpenCV》一书中的插图:
目前支持uchar和float两种类型,经测试,与OpenCV3.1结果完全一致。
实现代码warpPerspective.hpp:
// fbc_cv is free software and uses the same licence as OpenCV
// Email: [email protected]
#ifndef FBC_CV_WARP_PERSPECTIVE_HPP_
#define FBC_CV_WARP_PERSPECTIVE_HPP_
/* reference: include/opencv2/imgproc.hpp
modules/imgproc/src/imgwarp.cpp
*/
#include <typeinfo>
#include "core/mat.hpp"
#include "core/invert.hpp"
#include "imgproc.hpp"
#include "remap.hpp"
namespace fbc {
// Calculates a perspective transform from four pairs of the corresponding points
FBC_EXPORTS int getPerspectiveTransform(const Point2f src1[], const Point2f src2[], Mat_<double, 1>& dst);
// Applies a perspective transformation to an image
// The function cannot operate in - place
// support type: uchar/float
/*
\f[\texttt{ dst } (x, y) = \texttt{ src } \left(\frac{ M_{ 11 } x + M_{ 12 } y + M_{ 13 } }{M_{ 31 } x + M_{ 32 } y + M_{ 33 }},
\frac{ M_{ 21 } x + M_{ 22 } y + M_{ 23 } }{M_{ 31 } x + M_{ 32 } y + M_{ 33 }} \right)\f]
*/
template<typename _Tp1, typename _Tp2, int chs1, int chs2>
int warpPerspective(const Mat_<_Tp1, chs1>& src, Mat_<_Tp1, chs1>& dst, const Mat_<_Tp2, chs2>& M_,
int flags = INTER_LINEAR, int borderMode = BORDER_CONSTANT, const Scalar& borderValue = Scalar())
{
FBC_Assert(src.data != NULL && dst.data != NULL && M_.data != NULL);
FBC_Assert(src.cols > 0 && src.rows > 0 && dst.cols > 0 && dst.rows > 0);
FBC_Assert(src.data != dst.data);
FBC_Assert(typeid(double).name() == typeid(_Tp2).name() && M_.rows == 3 && M_.cols == 3);
FBC_Assert((typeid(uchar).name() == typeid(_Tp1).name()) || (typeid(float).name() == typeid(_Tp1).name())); // uchar/float
double M[9];
Mat_<double, 1> matM(3, 3, M);
int interpolation = flags & INTER_MAX;
if (interpolation == INTER_AREA)
interpolation = INTER_LINEAR;
if (!(flags & WARP_INVERSE_MAP))
invert(M_, matM);
Range range(0, dst.rows);
const int BLOCK_SZ = 32;
short XY[BLOCK_SZ*BLOCK_SZ * 2], A[BLOCK_SZ*BLOCK_SZ];
int x, y, x1, y1, width = dst.cols, height = dst.rows;
int bh0 = std::min(BLOCK_SZ / 2, height);
int bw0 = std::min(BLOCK_SZ*BLOCK_SZ / bh0, width);
bh0 = std::min(BLOCK_SZ*BLOCK_SZ / bw0, height);
for (y = range.start; y < range.end; y += bh0) {
for (x = 0; x < width; x += bw0) {
int bw = std::min(bw0, width - x);
int bh = std::min(bh0, range.end - y); // height
Mat_<short, 2> _XY(bh, bw, XY), matA;
Mat_<_Tp1, chs1> dpart;
dst.getROI(dpart, Rect(x, y, bw, bh));
for (y1 = 0; y1 < bh; y1++) {
short* xy = XY + y1*bw * 2;
double X0 = M[0] * x + M[1] * (y + y1) + M[2];
double Y0 = M[3] * x + M[4] * (y + y1) + M[5];
double W0 = M[6] * x + M[7] * (y + y1) + M[8];
if (interpolation == INTER_NEAREST) {
x1 = 0;
for (; x1 < bw; x1++) {
double W = W0 + M[6] * x1;
W = W ? 1. / W : 0;
double fX = std::max((double)INT_MIN, std::min((double)INT_MAX, (X0 + M[0] * x1)*W));
double fY = std::max((double)INT_MIN, std::min((double)INT_MAX, (Y0 + M[3] * x1)*W));
int X = saturate_cast<int>(fX);
int Y = saturate_cast<int>(fY);
xy[x1 * 2] = saturate_cast<short>(X);
xy[x1 * 2 + 1] = saturate_cast<short>(Y);
}
} else {
short* alpha = A + y1*bw;
x1 = 0;
for (; x1 < bw; x1++) {
double W = W0 + M[6] * x1;
W = W ? INTER_TAB_SIZE / W : 0;
double fX = std::max((double)INT_MIN, std::min((double)INT_MAX, (X0 + M[0] * x1)*W));
double fY = std::max((double)INT_MIN, std::min((double)INT_MAX, (Y0 + M[3] * x1)*W));
int X = saturate_cast<int>(fX);
int Y = saturate_cast<int>(fY);
xy[x1 * 2] = saturate_cast<short>(X >> INTER_BITS);
xy[x1 * 2 + 1] = saturate_cast<short>(Y >> INTER_BITS);
alpha[x1] = (short)((Y & (INTER_TAB_SIZE - 1))*INTER_TAB_SIZE + (X & (INTER_TAB_SIZE - 1)));
}
}
}
if (interpolation == INTER_NEAREST) {
remap(src, dpart, _XY, Mat_<float, 1>(), interpolation, borderMode, borderValue);
} else {
Mat_<ushort, 1> _matA(bh, bw, A);
remap(src, dpart, _XY, _matA, interpolation, borderMode, borderValue);
}
}
}
return 0;
}
} // namespace fbc
#endif // FBC_CV_WARP_PERSPECTIVE_HPP_
#include "test_warpPerspective.hpp"
#include <assert.h>
#include <opencv2/opencv.hpp>
#include <warpPerspective.hpp>
int test_getPerspectiveTransform()
{
cv::Mat matSrc = cv::imread("E:/GitCode/OpenCV_Test/test_images/lena.png", 1);
if (!matSrc.data) {
std::cout << "read image fail" << std::endl;
return -1;
}
fbc::Point2f src_vertices[4], dst_vertices[4];
src_vertices[0] = fbc::Point2f(0, 0);
src_vertices[1] = fbc::Point2f(matSrc.cols - 5, 0);
src_vertices[2] = fbc::Point2f(matSrc.cols - 10, matSrc.rows - 1);
src_vertices[3] = fbc::Point2f(8, matSrc.rows - 13);
dst_vertices[0] = fbc::Point2f(17, 21);
dst_vertices[1] = fbc::Point2f(matSrc.cols - 23, 19);
dst_vertices[2] = fbc::Point2f(matSrc.cols / 2 + 5, matSrc.rows / 3 + 7);
dst_vertices[3] = fbc::Point2f(55, matSrc.rows / 5 + 33);
fbc::Mat_<double, 1> warpMatrix(3, 3);
fbc::getPerspectiveTransform(src_vertices, dst_vertices, warpMatrix);
cv::Point2f src_vertices_[4], dst_vertices_[4];
src_vertices_[0] = cv::Point2f(0, 0);
src_vertices_[1] = cv::Point2f(matSrc.cols - 5, 0);
src_vertices_[2] = cv::Point2f(matSrc.cols - 10, matSrc.rows - 1);
src_vertices_[3] = cv::Point2f(8, matSrc.rows - 13);
dst_vertices_[0] = cv::Point2f(17, 21);
dst_vertices_[1] = cv::Point2f(matSrc.cols - 23, 19);
dst_vertices_[2] = cv::Point2f(matSrc.cols / 2 + 5, matSrc.rows / 3 + 7);
dst_vertices_[3] = cv::Point2f(55, matSrc.rows / 5 + 33);
cv::Mat warpMatrix_ = cv::getPerspectiveTransform(src_vertices_, dst_vertices_);
assert(warpMatrix.cols == warpMatrix_.cols && warpMatrix.rows == warpMatrix_.rows);
assert(warpMatrix.step == warpMatrix_.step);
for (int y = 0; y < warpMatrix.rows; y++) {
const fbc::uchar* p = warpMatrix.ptr(y);
const uchar* p_ = warpMatrix_.ptr(y);
for (int x = 0; x < warpMatrix.step; x++) {
assert(p[x] == p_[x]);
}
}
return 0;
}
int test_warpPerspective_uchar()
{
cv::Mat matSrc = cv::imread("E:/GitCode/OpenCV_Test/test_images/lena.png", 1);
if (!matSrc.data) {
std::cout << "read image fail" << std::endl;
return -1;
}
for (int interpolation = 0; interpolation < 5; interpolation++) {
fbc::Point2f src_vertices[4], dst_vertices[4];
src_vertices[0] = fbc::Point2f(0, 0);
src_vertices[1] = fbc::Point2f(matSrc.cols - 5, 0);
src_vertices[2] = fbc::Point2f(matSrc.cols - 10, matSrc.rows - 1);
src_vertices[3] = fbc::Point2f(8, matSrc.rows - 13);
dst_vertices[0] = fbc::Point2f(17, 21);
dst_vertices[1] = fbc::Point2f(matSrc.cols - 23, 19);
dst_vertices[2] = fbc::Point2f(matSrc.cols / 2 + 5, matSrc.rows / 3 + 7);
dst_vertices[3] = fbc::Point2f(55, matSrc.rows / 5 + 33);
fbc::Mat_<double, 1> warpMatrix(3, 3);
fbc::getPerspectiveTransform(src_vertices, dst_vertices, warpMatrix);
fbc::Mat_<uchar, 3> mat(matSrc.rows, matSrc.cols, matSrc.data);
fbc::Mat_<uchar, 3> warp_dst;
warp_dst.zeros(mat.rows, mat.cols);
fbc::warpPerspective(mat, warp_dst, warpMatrix, interpolation);
cv::Point2f src_vertices_[4], dst_vertices_[4];
src_vertices_[0] = cv::Point2f(0, 0);
src_vertices_[1] = cv::Point2f(matSrc.cols - 5, 0);
src_vertices_[2] = cv::Point2f(matSrc.cols - 10, matSrc.rows - 1);
src_vertices_[3] = cv::Point2f(8, matSrc.rows - 13);
dst_vertices_[0] = cv::Point2f(17, 21);
dst_vertices_[1] = cv::Point2f(matSrc.cols - 23, 19);
dst_vertices_[2] = cv::Point2f(matSrc.cols / 2 + 5, matSrc.rows / 3 + 7);
dst_vertices_[3] = cv::Point2f(55, matSrc.rows / 5 + 33);
// Get the Perspective Transform
cv::Mat warpMatrix_ = cv::getPerspectiveTransform(src_vertices_, dst_vertices_);
// Set the dst image the same type and size as src
cv::Mat warp_dst_ = cv::Mat::zeros(matSrc.rows, matSrc.cols, matSrc.type());
cv::Mat mat_;
matSrc.copyTo(mat_);
// Apply the Affine Transform just found to the src image
cv::warpPerspective(mat_, warp_dst_, warpMatrix_, warp_dst_.size(), interpolation);
assert(warp_dst.cols == warp_dst_.cols && warp_dst.rows == warp_dst_.rows);
assert(warp_dst.step == warp_dst_.step);
for (int y = 0; y < warp_dst.rows; y++) {
const fbc::uchar* p = warp_dst.ptr(y);
const uchar* p_ = warp_dst_.ptr(y);
for (int x = 0; x < warp_dst.step; x++) {
assert(p[x] == p_[x]);
}
}
}
return 0;
}
int test_warpPerspective_float()
{
cv::Mat matSrc = cv::imread("E:/GitCode/OpenCV_Test/test_images/lena.png", 1);
if (!matSrc.data) {
std::cout << "read image fail" << std::endl;
return -1;
}
cv::cvtColor(matSrc, matSrc, CV_BGR2GRAY);
matSrc.convertTo(matSrc, CV_32FC1);
for (int interpolation = 0; interpolation < 5; interpolation++) {
fbc::Point2f src_vertices[4], dst_vertices[4];
src_vertices[0] = fbc::Point2f(0, 0);
src_vertices[1] = fbc::Point2f(matSrc.cols - 5, 0);
src_vertices[2] = fbc::Point2f(matSrc.cols - 10, matSrc.rows - 1);
src_vertices[3] = fbc::Point2f(8, matSrc.rows - 13);
dst_vertices[0] = fbc::Point2f(17, 21);
dst_vertices[1] = fbc::Point2f(matSrc.cols - 23, 19);
dst_vertices[2] = fbc::Point2f(matSrc.cols / 2 + 5, matSrc.rows / 3 + 7);
dst_vertices[3] = fbc::Point2f(55, matSrc.rows / 5 + 33);
fbc::Mat_<double, 1> warpMatrix(3, 3);
fbc::getPerspectiveTransform(src_vertices, dst_vertices, warpMatrix);
fbc::Mat_<float, 1> mat(matSrc.rows, matSrc.cols, matSrc.data);
fbc::Mat_<float, 1> warp_dst;
warp_dst.zeros(mat.rows, mat.cols);
fbc::warpPerspective(mat, warp_dst, warpMatrix, interpolation);
cv::Point2f src_vertices_[4], dst_vertices_[4];
src_vertices_[0] = cv::Point2f(0, 0);
src_vertices_[1] = cv::Point2f(matSrc.cols - 5, 0);
src_vertices_[2] = cv::Point2f(matSrc.cols - 10, matSrc.rows - 1);
src_vertices_[3] = cv::Point2f(8, matSrc.rows - 13);
dst_vertices_[0] = cv::Point2f(17, 21);
dst_vertices_[1] = cv::Point2f(matSrc.cols - 23, 19);
dst_vertices_[2] = cv::Point2f(matSrc.cols / 2 + 5, matSrc.rows / 3 + 7);
dst_vertices_[3] = cv::Point2f(55, matSrc.rows / 5 + 33);
// Get the Perspective Transform
cv::Mat warpMatrix_ = cv::getPerspectiveTransform(src_vertices_, dst_vertices_);
// Set the dst image the same type and size as src
cv::Mat warp_dst_ = cv::Mat::zeros(matSrc.rows, matSrc.cols, matSrc.type());
cv::Mat mat_;
matSrc.copyTo(mat_);
// Apply the Affine Transform just found to the src image
cv::warpPerspective(mat_, warp_dst_, warpMatrix_, warp_dst_.size(), interpolation);
assert(warp_dst.cols == warp_dst_.cols && warp_dst.rows == warp_dst_.rows);
assert(warp_dst.step == warp_dst_.step);
for (int y = 0; y < warp_dst.rows; y++) {
const fbc::uchar* p = warp_dst.ptr(y);
const uchar* p_ = warp_dst_.ptr(y);
for (int x = 0; x < warp_dst.step; x++) {
assert(p[x] == p_[x]);
}
}
}
return 0;
}
GitHub: https://github.com/fengbingchun/OpenCV_Test
再分享一下我老师大神的人工智能教程吧。零基础!通俗易懂!风趣幽默!还带黄段子!希望你也加入到我们人工智能的队伍中来!https://blog.csdn.net/jiangjunshow