点击“计算机视觉life”关注,置顶更快接收消息!
由于格式问题最好在公众号上观看《IMU 标定-工业界和学术界有什么不同?》
本文主要介绍了IMU基本结构原理和误差的相关概念,IMU误差模型,并较详细介绍了商用产品和学术文献提到的两种IMU标定方法。
本文阅读时间约8分钟
了解IMU和误差
IMU(Inertial Measurement Unit)是测量运动物体惯性运动,输出三轴加速度和三轴角速度等信息的电子元件,用于姿态角和运动路径等测量。IMU常常还包含了磁力计、压力计、温度计和GPS等辅助单元,相互配合完成更复杂的任务。
IMU的应用广泛。放图说明,姿态角确定,惯性导航,SLAM,动作捕捉,无人机镜头防抖(实现鸡头类似的效果)
{kind=link}
{kind=link}
{kind=link}

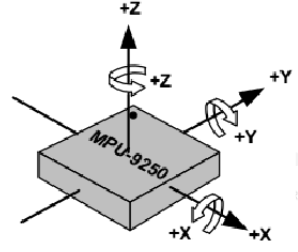
六轴IMU的结构如下图,坐标轴一般遵循右手定则,理想情况下XYZ轴相互正交,加速度计和陀螺仪的轴相互重合。但是通常情况下,IMU存在一定的偏差。例如,从Inven Sense的MPU-9250芯片内部结构图可以看到该加速度计(XY、Z轴)和陀螺仪分开制造,因此加速度计和陀螺仪的坐标轴中心并不严格重合,甚至加速度计不同轴也是分开加工,坐标轴也不能保证完全正交。而且,加工过程或多或少有误差,如对称度不好,产生零偏。另外,IMU的内部参数还会随时间、温度变化,产生温漂。
IMU出厂时存在参数误差不可避免,而参数误差常常会造成严重问题:
- 偏置异常,会造成数据漂移严重。
- 轴向正交性和尺度异常,x-,y-,z-轴不正交或尺度不一致,会造成同一失量的模在不同方向上不一致。
- 另外,噪声也会使测量值失真。
IMU误差模型
IMU中x-y-z轴的偏置误差\(\mathbf{b}^a\)可以表示为不同轴的零点偏置,即
\[ \mathbf{b}^a = \begin{bmatrix} b_x \\ b_y \\ b_z \\ \end{bmatrix} \]
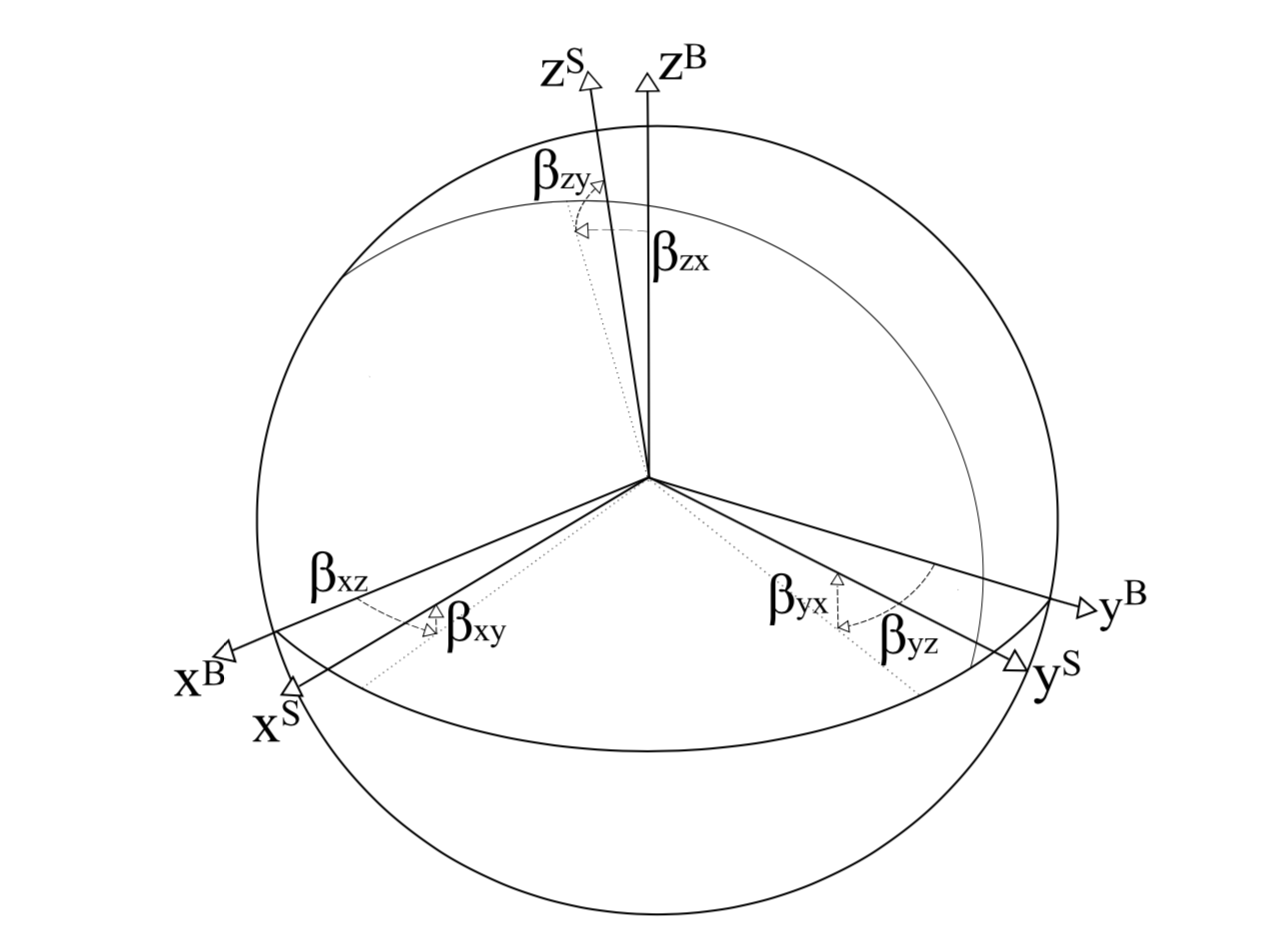
IMU中x-y-z轴的正交误差$\mathbf{T}^a \(和尺度误差\)\mathbf{K}^a \(可以通过下图表示。\)\mathbf{x}^B\(-\)\mathbf{y}^B\(-\)\mathbf{z}^B\(为外部坐标系正交归一的三个轴(可以理解为\) |\mathbf{x}^B| = 1\(,\) |\mathbf{y}^B| = 1\(,\) |\mathbf{z}^B| = 1$),而 \(\mathbf{x}^S\) 表示传感器x轴的放大系数(相比\(\mathbf{x}^B\)),\(\beta_{\mathbf{x}\mathbf{y}}\) 表示x轴在x-y平面内顺时针偏离了\(\beta_{\mathbf{x}\mathbf{y}}\)弧度(小角度近似),其他参数同理。
正交误差\(\mathbf{T}^a\) 通常可以表示为
\[ \mathbf{T}^a = \begin{bmatrix} 1 & -\beta_{\mathbf{y}\mathbf{z}} & \beta_{\mathbf{z}\mathbf{y}} \\ \beta_{\mathbf{x}\mathbf{z}} & 1 & -\beta_{\mathbf{z}\mathbf{x}} \\ -\beta_{\mathbf{x}\mathbf{y}} & \beta_{\mathbf{y}\mathbf{x}} & 1 \\ \end{bmatrix} \]
尺度误差\(\mathbf{K}^a\) 通常可以表示为
\[ \mathbf{K}^a = \begin{bmatrix} \mathbf{x}^S & 0 & 0 \\ 0 & \mathbf{y}^S & 0 \\ 0 & 0 & \mathbf{z}^S \\ \end{bmatrix} \]
在忽略噪声误差的条件下,加速度计的偏置误差\(\mathbf{b}^a\)、正交误差$\mathbf{T}^a \(和尺度误差\)\mathbf{K}^a$的模型可以表示为
\[ \mathbf{a}^O = \mathbf{T}^a \mathbf{K}^a \begin{pmatrix} \mathbf{a}^S + \mathbf{b}^a \end{pmatrix} \]
其中\(\mathbf{a}^S\)是加速度计的原始测量值,\(\mathbf{a}^O\)是加速度计误差补偿后的值。同理,陀螺的误差模型可以表示为
\[ \mathbf{\omega}^O = \mathbf{T}^g \mathbf{K}^g \begin{pmatrix} \mathbf{\omega}^S + \mathbf{b}^g \end{pmatrix} \]
其中\(\mathbf{\omega}^S\)是陀螺的原始测量值,\(\mathbf{\omega}^O\)是陀螺误差补偿后的值。
较方便的标定方法
在看严谨的标定操作之前,看一下商用产品大疆Spark无人机的标定流程:
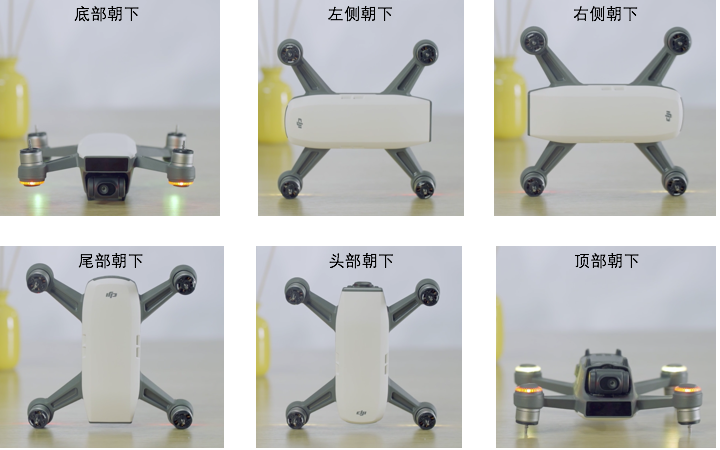
官方给的方法是在水平面上,按照图片提示六个位置静止放置片刻,即自动得到标定参数。由于重力方向和大小不变,这六个位置分别(近似)是IMU的X、-X、Y、-Y、Z和-Z朝向下的方向,因此至少可以拟合出加速度计三个轴的尺度因子、偏置以及陀螺仪的偏置。该标定方法有以下的假设
- 重力不变且垂直向下。
- 保持静止,可以测量陀螺仪的偏置。
对于外行人这样的标定流程简洁、快捷,适合商用级产品,但是由于标定数据太少,标定误差会较大,不利于高精度测量和导航应用,如SLAM等。
更精确标定方法
为了更深入了解标定原理过程,文献A robust and easy to implement method for IMU calibration without external equipments 给出了一种更为精确的IMU标定方法,GitHub上也有相应的Matlab源代码实现,亲试可用,还有动态演示效果不错。相比商用产品的简易标定流程,该标定方法有以下几点不同:
- 给出了加速度计和陀螺仪更复杂的模型。
- 利用Allan方差的定义,标定陀螺仪的偏置。
- 大量冗余数据,保证最优化收敛。利用数十次测量数据而不是仅仅6个位置。
- 利用Runge-Kutta积分和四元数表示法,实现陀螺仪的轴向偏差和尺度因子的标定。
标定流程图:
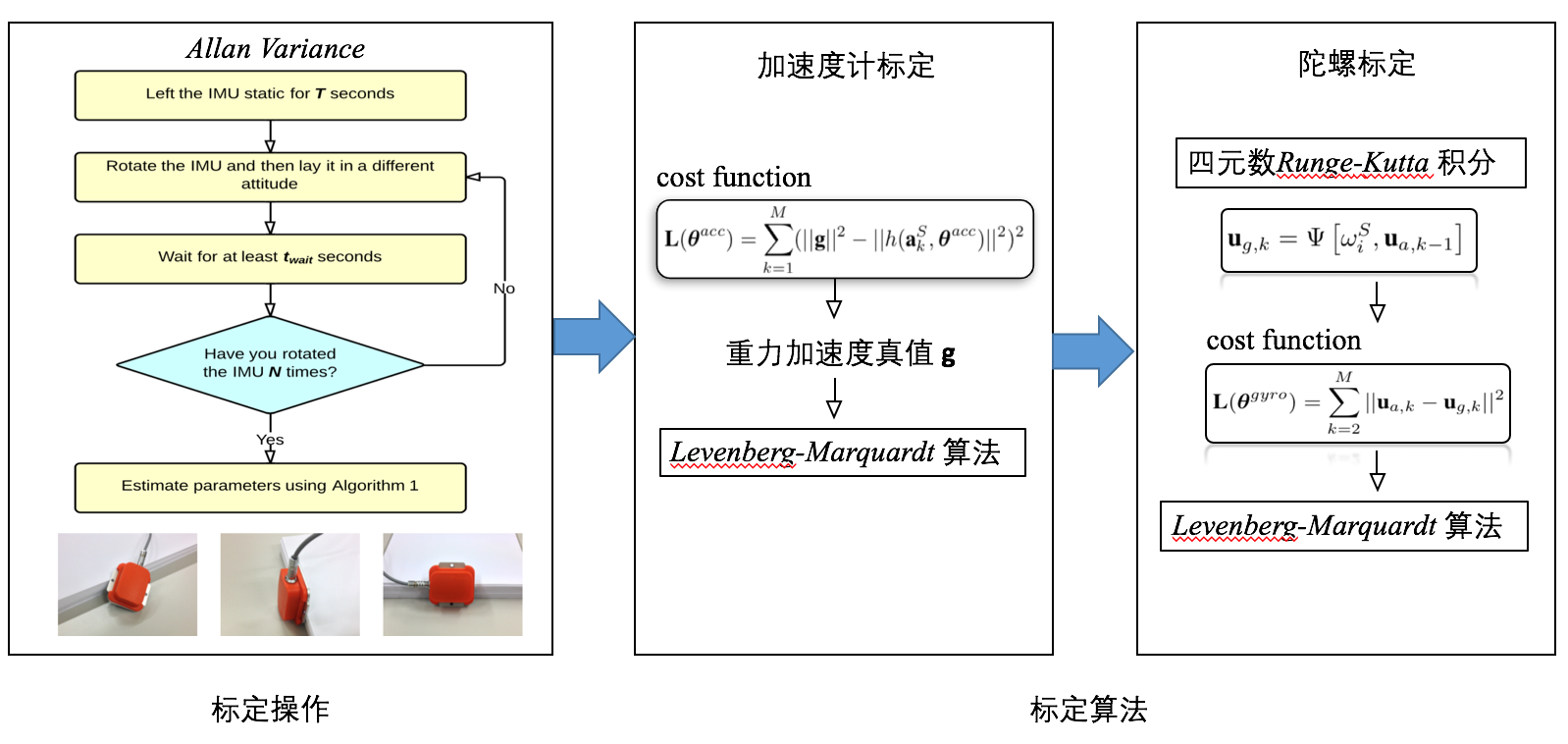
标定首先通过Allan方差定义测试出IMU标定静止的时间T,等待T时间后,旋转IMU并静止,静止时获取加速度数据,旋转时获取陀螺数据,循环多次后(36-50次)完成标定操作,随后算法自动完成标定。
算法首先标定加速度计,利用加速度计测量值的模和重力加速度真实g的方差构建损失函数,利用LM算法,使得最优化快速收敛,得到\(\mathbf{b}^a\)、$\mathbf{T}^a \(和\)\mathbf{K}^a$ 参数。
在标定完加速度计的基础上,标定陀螺,获得陀螺坐标相对于加速度计参考坐标的正交误差,最后偏置和尺度误差也能通过最优化算法求出。此处有一个处理的小技巧,利用四元数的超复数表示方法,可以通过积分的办法,方便地求出一个时序角速度产生的总的角度变化,并利用加速度计得到的角度和积分得出的角度比较,得到损失函数,并同样用LM算法求出陀螺的误差参数。
实际标定操作和算法处理过程中,有几点很重要。
1、和深度学习训练样本一样,IMU标定的最优化过程也需要样本的平衡性。和复杂一些的非线性最优化类似,IMU参数标定算法一般也是基于Levenberg–Marquardt参数算法的拟合算法。而旋转操作可以让IMU数据(如加速度计)在三维数据空间中形成椭球形,数据均匀分布在椭球面上能够避免某一轴向的拟合权重过大,造成拟合椭球变形。
2、传感器对温度敏感(特别是陀螺仪),因此在没有温度计并且温度补偿的条件下,保证IMU的热平衡很重要。陀螺仪除了零点偏置,还有零点偏置漂移等更多误差,因此动态调节。
3、对加速度数据积分的起点和终点很关键。由于是人为转动IMU产生的抖动比较严重,因此转动的开始和结束不是很清晰,可以通过滤波减少积分误差。
4、标定器材配套很重要。手持式标定会引入人为振动,因此最好为IMU设计相应稳定可靠的标定装置,比如具有类似地球仪的旋转结构,并且带有刻度、有水平仪的仪器,这样能够实现垂直状态和特定角度转动。
5、利用Allan方差定义,可得到等待时间。但仍然存在问题,不同轴陀螺的Allan方差不一样,甚至可能差别很大。
6、IMU的坐标绝对基准还是不能标定得到。
以上两种方法制作的轻量级标定工具适用于一般的研究或产品,但对于一些高性能传感器,它们自身误差甚至小于标定参数精度,以上标定方法不再适用。需要很多价格不菲的精密仪器去标定,即提供绝对基准。
推荐阅读
从零开始一起学习SLAM | 为什么要学SLAM?
从零开始一起学习SLAM | 学习SLAM到底需要学什么?
从零开始一起学习SLAM | SLAM有什么用?
从零开始一起学习SLAM | C++新特性要不要学?
从零开始一起学习SLAM | 为什么要用齐次坐标?
从零开始一起学习SLAM | 三维空间刚体的旋转
从零开始一起学习SLAM | 为啥需要李群与李代数?
从零开始一起学习SLAM | 相机成像模型
从零开始一起学习SLAM | 不推公式,如何真正理解对极约束?
从零开始一起学习SLAM | 神奇的单应矩阵
从零开始一起学习SLAM | 你好,点云
从零开始一起学习SLAM | 给点云加个滤网
从零开始一起学习SLAM | 点云平滑法线估计
零基础小白,如何入门计算机视觉?
SLAM领域牛人、牛实验室、牛研究成果梳理
我用MATLAB撸了一个2D LiDAR SLAM
可视化理解四元数,愿你不再掉头发
最近一年语义SLAM有哪些代表性工作?
视觉SLAM技术综述
欢迎关注公众号:计算机视觉life,一起探索计算机视觉新世界~