目录
如何分析一个排序的算法?
-
执行效率
- 最好,最坏,平均时间复杂度
- 时间复杂度的系数,常数,低阶
- 比较的次数(或者移动的次数)
-
内存消耗
原地排序算法:就是特指空间复杂度是O(1)的排序算法。
-
排序算法的稳定性
如果数据经过某种排序算法排序之后,相同数据之间的位置顺序没有改变,那我们就把这种排序算法叫做稳定的排序算法,如果前后顺序发生了变化,那对应的排序算法就叫作不稳定的排序算法。
冒泡排序
思路:冒泡排序只会操作相邻的两个数据。每次冒泡操作都会对相邻的两个元素进行比较,看是否满足大小关系的要求。如果不满足就互换。一次冒泡会让至少一个元素移动到它应该在的位置,重复n次,就完成了n个数据的排序工作。
比如说一组数据4,5,6,3,2,1,从小到大进行排序。
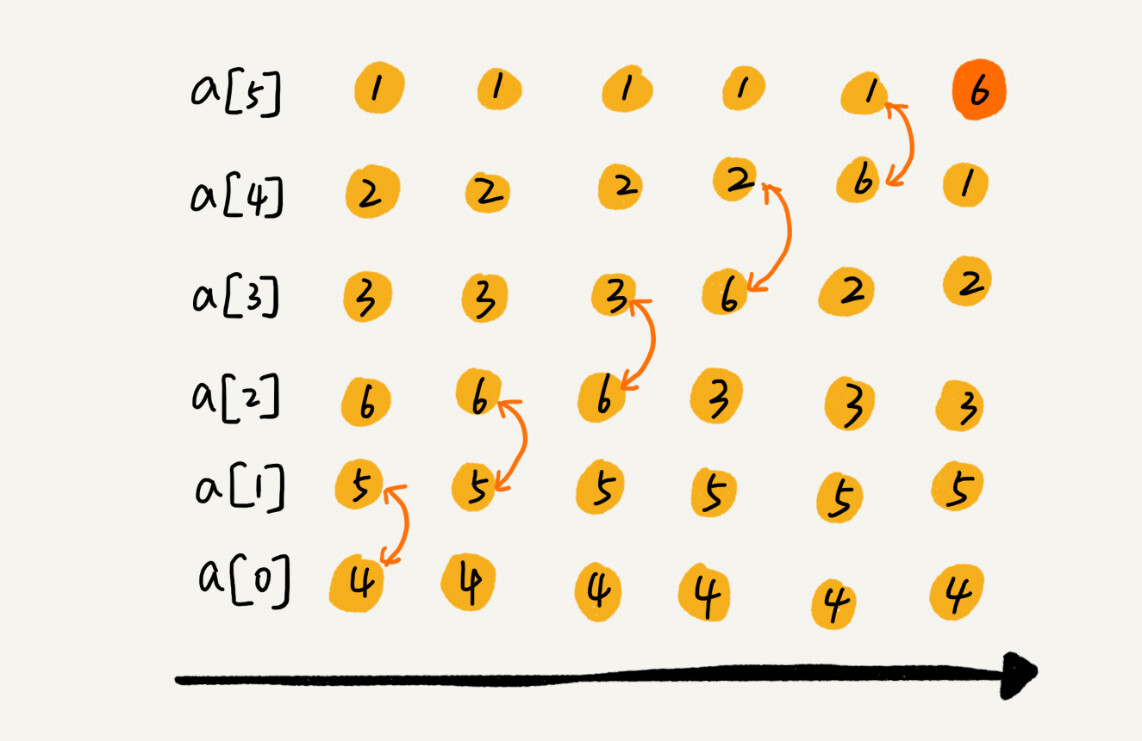
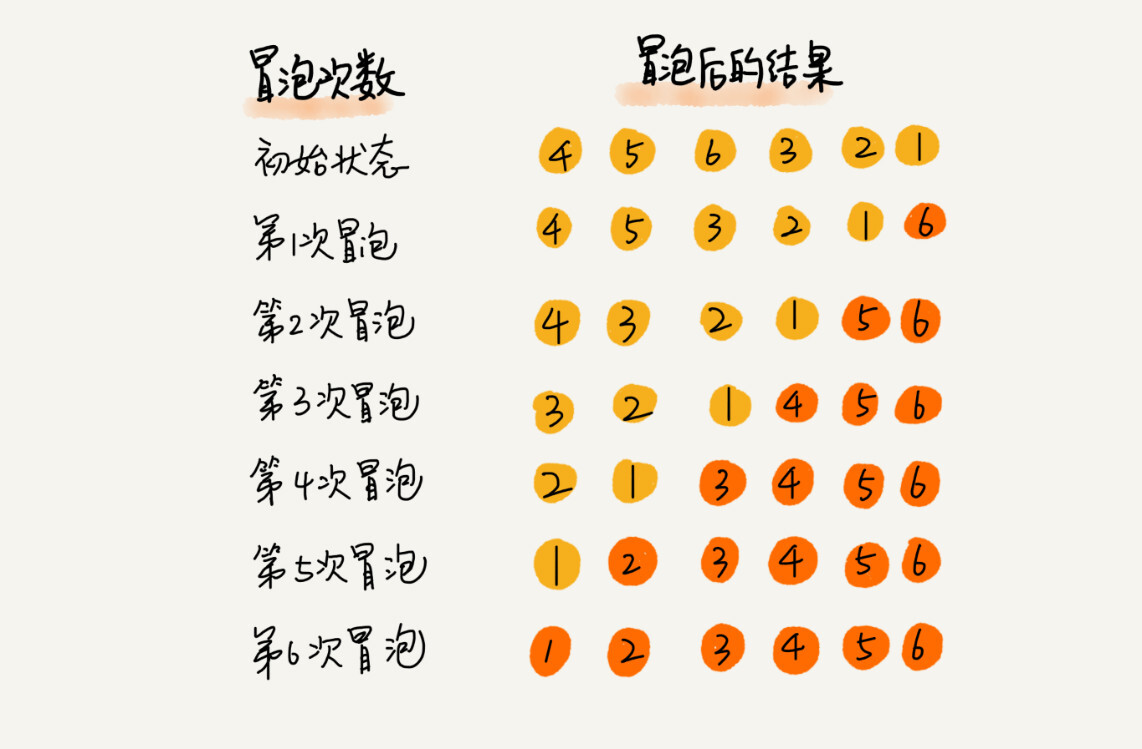
可以看到,经过了一次冒泡操作之后,6这个元素已经存储在正确的位置上了。要想完成所有数据的排序,我们只要进行6次这样的操作就可以了。
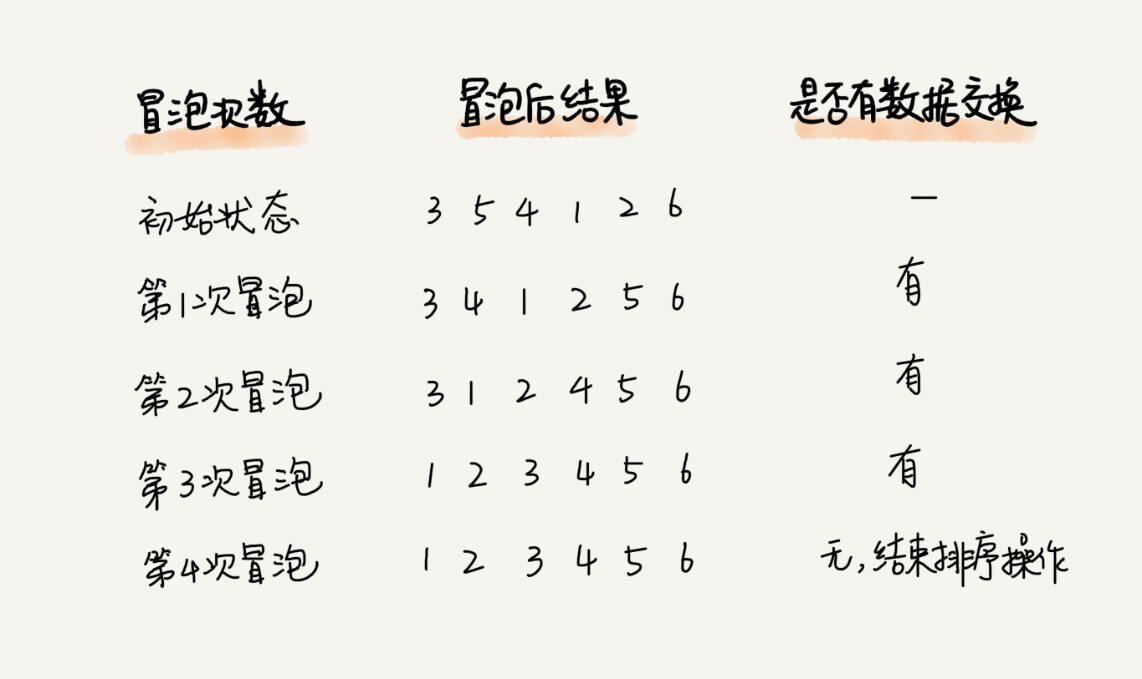
但这个还是可以优化的:我们设置一个flag来判断是否有位置交换,一旦没有了位置的交换,那么就说明已经排好序了。
这里给出代码的实现:
void bubble_sort(int* arr,int size){
if(size <= 1){
return;
}
for(int i=0;i<size;++i){
bool flag = false;
for(int j=0;j<size-1-i;++j){
if(arr[j] > arr[j+1]){
int temp = arr[j];
arr[j] = arr[j+1];
arr[j+1] = temp;
flag = true;
}
}
if(flag == false){
break;
}
}
}分析:
1.时间复杂度
冒泡排序的最好时间复杂度是O(n)(这个还是优化之后的),最坏时间复杂度是O(),那么平均时间复杂度呢?为了简化分析的过程,我们引入了”有序度“和”无序度“这两个概念来分析。
有序度是指数组中具有有序关系的元素的个数。
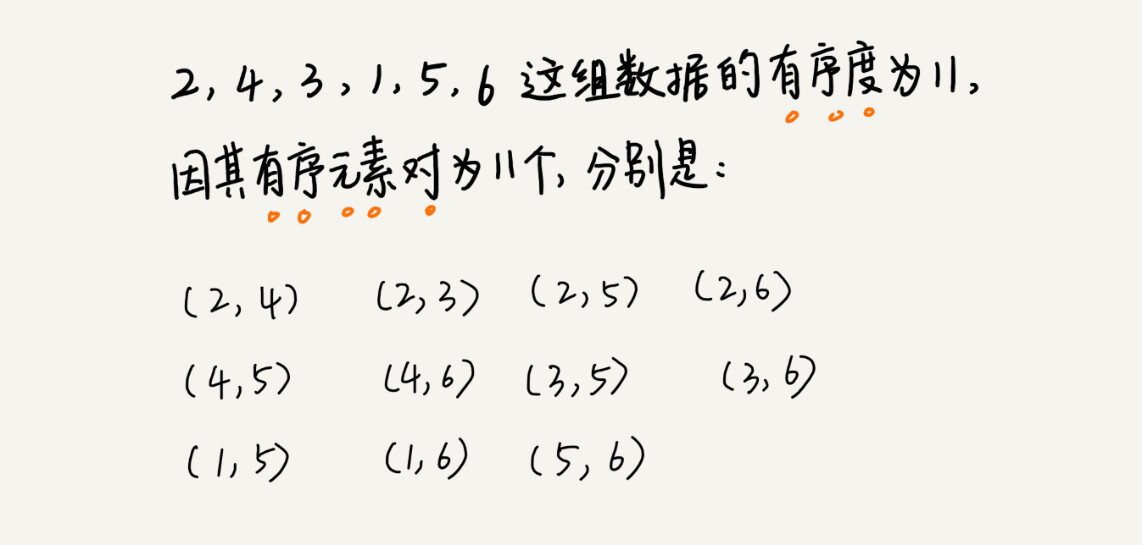
同理,对于一个倒序排列的数组,比如6,5,4,3,2,1,有序度为0。对于一个完全有序的数组,比如1,2,3,4,5,6来说,它的有序度是n(n-1)/2,我们把这种完全有序的数组的有序度叫作满有序度。
逆序度的定义正好跟有序度相反(默认从小到大为有序),我想你应该想到了。关于这三个概念有一个公式:逆序度 = 满有序度 - 有序度。
冒泡排序包含两个操作原子,比较和交换。每交换一次,有序度就加1。不管算法如何改进,交换的次数是固定的,就是逆序度。对于包含n个数据的数组进行冒泡排序,我们知道,当这个数组已经有序的时候,不需要进行交换,逆序度为0,最坏情况的时候,逆序度为n(n-1)/2,那么我们取一个平均就得到n(n-1)/4,那么它的平均时间复杂度就是O(n^2)。
2.空间复杂度
从代码中我们可以看到,这个算法只涉及一个替代的int类型,因此是一个原地排序算法
3.稳定性
从代码中我们可以看到,当数据相同的时候,没有发生交换,因此是一个稳定的排序算法。
插入排序
思路:首先,我们将数组中的数据分为两个区间,已排序区间和未排序区间。初始已排序区间只有一个元素,就是数组的第一个元素。插入算法的核心思想是取未排序的区间中的元素,在已排序的区间中找到合适的插入位置将其插入,并保证已经排序区间数据一直有序,直到未排序区间中元素为空,算法结束。注意这里在已排序的区间进行查找的话,我们要在最后开始进行查找。编程起来比较容易实现。
假设我们要排序的数据为:4,5,6,1,3,2,其中左边为已经排序的区间,右边是未排序的区间。
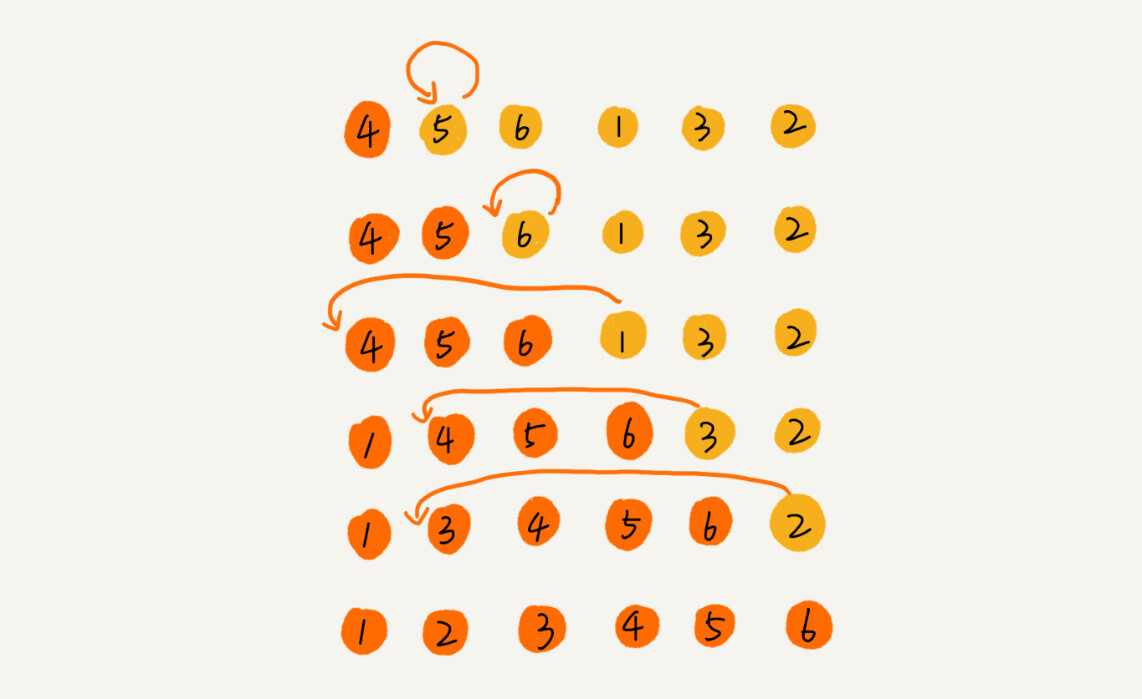
插入排序也包含两个操作,一个是比较,一个是移动。我们在插入一个数据的时候,需要将该位置后面的元素向后移动一位。不同的查找插入点方法,元素的比较次数可能不同,但是移动的次数总是固定的,就等于逆序度。其实跟冒泡一样,交换和移动的本质是一样的。
这里给出代码的实现:
void insert_sort(int* arr,int size){
if(size <= 1){
return;
}
for(int i=1;i<size;++i){
int value = arr[i]; // 记录未排序区间的值,因为后面移位置已经改变。
int j = i-1; // 从最后开始寻找
for(;j>=0;--j){
if(value < arr[j]){
arr[j+1] = arr[j];
}else{
break;
}
}
arr[j+1] = value;// 这里加1的原因是--j已经后退了。
}
}分析:
1.空间复杂度:从代码中我们可以看到,这个算法是在原本数据上进行操作的,没有额外的空间消耗,所以这是一个原地排序算法。
2.稳定性:从代码中我们可以看到,当数据相同的时候,位置没有发生改变,因此是一个稳定的算法。
3.时间复杂度:当数组有序的时候,每次只需要比较一个数据就可以确定插入的位置,因此这种情况下,最好时间复杂度是O(n)。当数组倒序的时候,每一个数据都要遍历已经排序的区间,因此,最坏时间复杂度是O(n^2)。那么平均时间复杂度呢?同冒泡一样,我们借助有序度和逆序度的分析知道,平均时间复杂度还是O(n^2)。
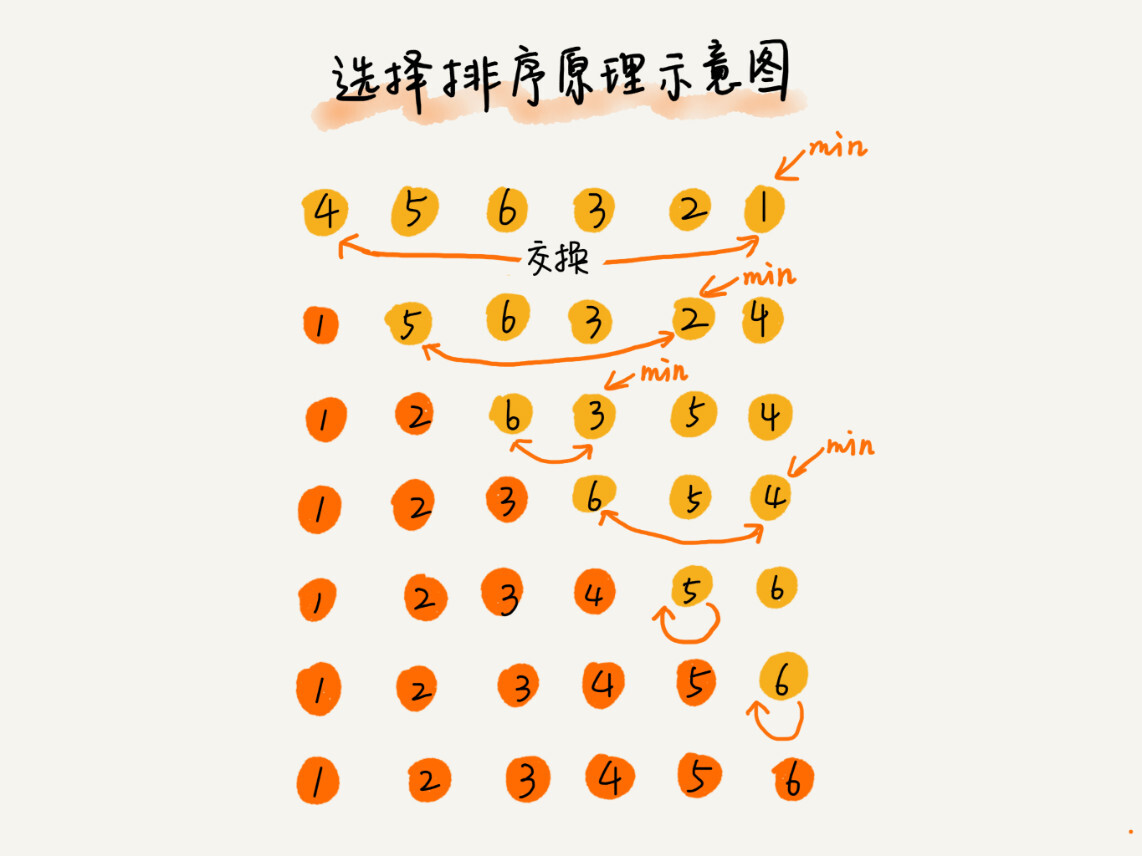
选择排序
思路:跟插入排序一样,我们把整个数组也分成已排序区间和未排序区间,每一次都在未排序区间找到最小的值,然后放到已排序区间的末尾。
这里给出代码实现:
void selete_sort(int* arr,int capacity){
if(capacity <=1){
return;
}
for(int i=0;i<capacity;++i){
int min_index = i; // 这里的min_index注意放在外面
for(int j=i;j<capacity;++j){
if(arr[j] > arr[min_index]){
min_index = j;
}
}
int temp = arr[i];
arr[i] = arr[min_index];
arr[min_index] = temp;
}
}分析:
1.时间复杂度
这里的选择排序没有最好的情况,也没有最坏的情况,从代码中,我们可以看出,对整个数组来说,要遍历数组中的每一个数,然后每一次数都要与已排序区间进行比较。因此最好时间,最坏时间,平均时间复杂度都是O(n^2)。
2.空间复杂度
整个算法是在原数组进行操作的,因此空间复杂度是O(1),它是原地算法
3.稳定性
由于选择排序每一次都要找剩余未排序的元素的最小值,并和前面的元素交换位置,这样就破坏了稳定性。因此相对插入,冒泡来说,选择排序就不那么常用了。
归并排序
思路:如果要排序一个数组,我们先把数组从中间分成前后两部分,然后对前后两部分分别排序,再将排好序的两部分合并在一起,这样整个数组就都有序了。
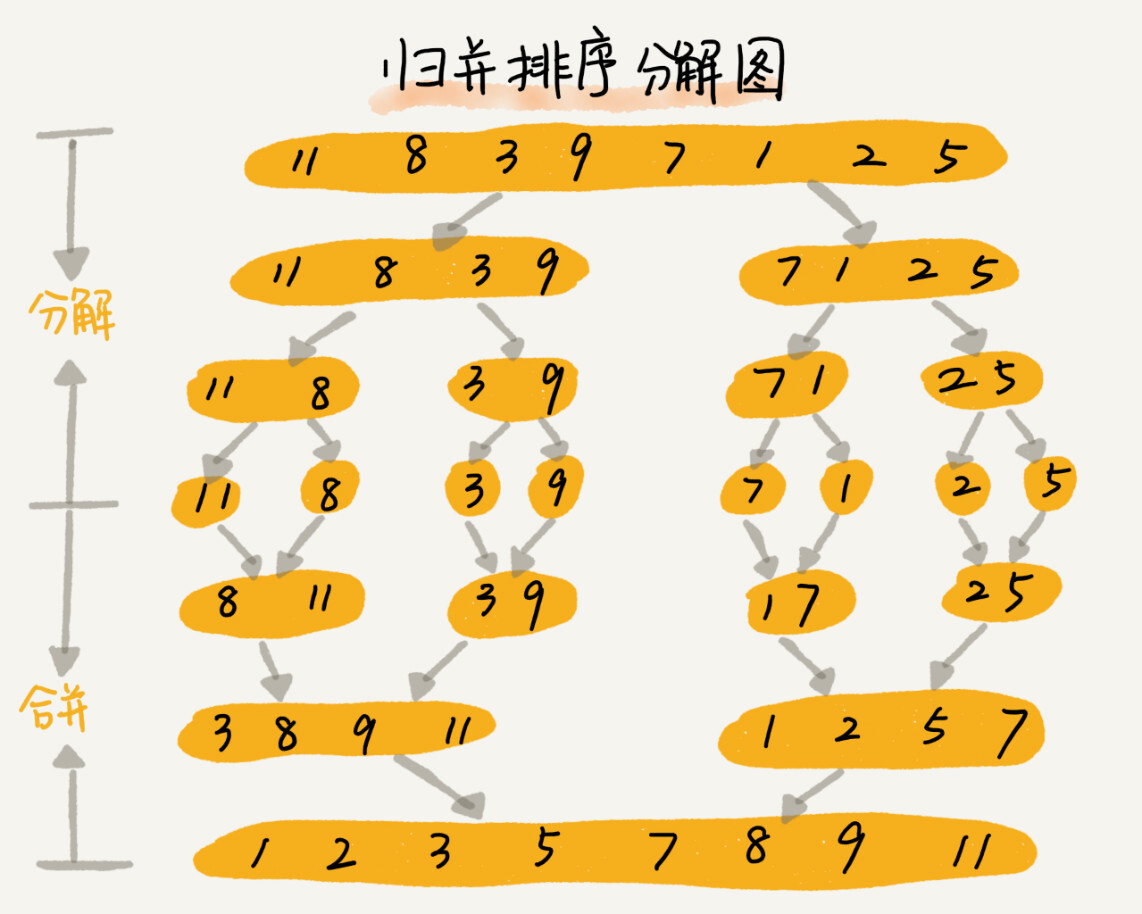
归并排序使用的是分治思想。分治,就是分而治之,将一个大问题分解成小的子问题来解决。小的子问题解决了,大问题也就解决了。这样的分治思想很适合使用递归的编程技巧来实现。
我们先写出递推公式:
递推公式:
merge_sort(p…r) = merge(merge_sort(p…q), merge_sort(q+1…r))
终止条件:
p >= r 不用再继续分解
所以现在问题的关键就转为如何实现merge函数,将两个已经排好序的部分拼接起来。其实这个问题我们在数组那里就做过了,它的本质其实就是两个有序的数组合并成一个有序的数组。
这里给出归并排序的代码实现:
void merge(int* arrays,int start,int end){
int* temp = new int[end-start+1];
int mid = start + ((end-start)>>1);// 防止两个数相加溢出
int i=start,j=mid+1,k=0;
while(i<=mid && j<=end){
if(arrays[i] < arrays[j]){
temp[k++] = arrays[i++];
}else{
temp[k++] = arrays[j++];
}
}
if(i<=mid){
for(;i<=mid;++i){
temp[k++] = arrays[i];
}
}else{
for(;j<=end;++j){
temp[k++] = arrays[j];
}
}
for(int count=0;count<(end-start+1);++count){
arrays[start+count] = temp[count];
}
}
void merge_sort_c(int* arrays,int start,int end){
if(start >= end){
return;
}
int mid = start + ((end-start)>>1);// 防止两个数相加溢出
merge_sort_c(arrays,start,mid);
merge_sort_c(arrays,mid+1,end);
merge(arrays,start,end);
}
void merge_sort(int* arrays,int size){
merge_sort_c(arrays,0,size-1);
}
int main(){
int nums[6] = {6,2,4,3,5,1};
merge_sort(nums,6);
for(int i=0;i<6;++i){
cout << nums[i] << endl;
}
}分析:
1.空间复杂度:
我们从merge函数中看出,每次merge函数都要开辟end-start+1的空间,但每一次函数都会释放,因此空间复杂度是O(n)。
2.稳定性:
我们在合并的时候,可以保持原来的顺序,因此它是一个稳定的算法。
3.时间复杂度:
递归代码的时间复杂度应该如何分析呢?
递归的适用场景是:一个问题可以分解成多个子问题b、c,那求解问题a就可以分解为求解问题b、c,问题b、c解决之后,我们再把b、c的结果合并成a的结果。如果我们定义求解问题a的时间是T(a),求解问题b、c的时间分别是T(b)、T(c),那我们就可以得到这样的递推关系:
T(a) = T(b) + T(c) + K
其中K等于将两个子问题b、c的结果合并成问题a的结果所消耗的时间。
我们假设对n个元素进行归并排序的时间是T(n),那分解成子数组的时间是T(n/2),合并的时间是O(n),那么就有:
T(1) = C; n=1 时,只需要常量级的执行时间,所以表示为 C。
T(n) = 2*T(n/2) + n; n>1
进一步分解有:
T(n) = 2*T(n/2) + n
= 2*(2*T(n/4) + n/2) + n = 4*T(n/4) + 2*n
= 4*(2*T(n/8) + n/4) + 2*n = 8*T(n/8) + 3*n
= 8*(2*T(n/16) + n/8) + 3*n = 16*T(n/16) + 4*n
......
= 2^k * T(n/2^k) + k * n
......
当T(n/2^k) = T(1)时,也就是n/2^k = 1,我们就可以得到k = log2n,带入上式,得到T(n) = n + nlog2n。如果我们使用大O表示法的话,那么他的时间复杂度就是O(nlogn)。另外,归并排序的执行效率与原始数组的有序度无关,所以其时间复杂度非常稳定,都是O(nlogn)。
快速排序
思路:如果要排序的数组中下表从p到r之间的一组数据,我们选择p到r之间的任意一个数据作为pivot(分区点)。我们遍历p到r之间的数据,将小于pivot的放到左边,大于pivot的放到右边,将pivot放在中间。经过这一个步骤,数组p到r之间的数据就分成了三个部分,前面p到q-1之间都是小于pivot的,中间是pivot,后面的p+1到r之间的是大于pivot的。
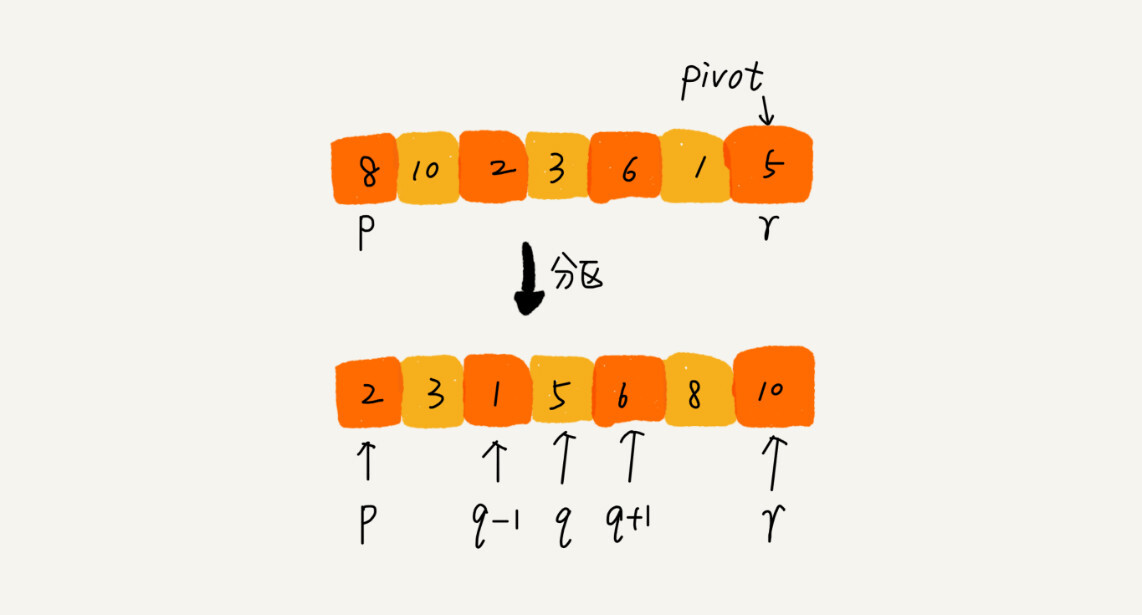
根据分治,递归的思想,我们可以用递归排序下标从p到q-1之间和下标q+1到r之间的数据,直到区间缩小为1,就说明所有的数据都有序了。
递归公式是这样的:
递推公式:
quick_sort(p…r) = quick_sort(p…q-1) + quick_sort(q+1, r)
终止条件:
p >= r
现在的问题就变成了如何实现分区函数,实现把小于pivot的放左边,大于pivot的放右边。 思路是这样的:我们借鉴选择排序的算法,每一次都选择最后一个数作为pivot,然后通过一个游标i 把p 到 r-1 之间的数分为左区间和右区间,游标 j 遍历p 到 r -1之间的数据,每一次取一个数跟piovt 比较,如果小于piovt的话,就把它放到左区间的末尾,然后i向前一步,否则i不移动,直到j遍历到最后一个数据,然后将pivot与 i 指向的数据进行交换就完成了分区。
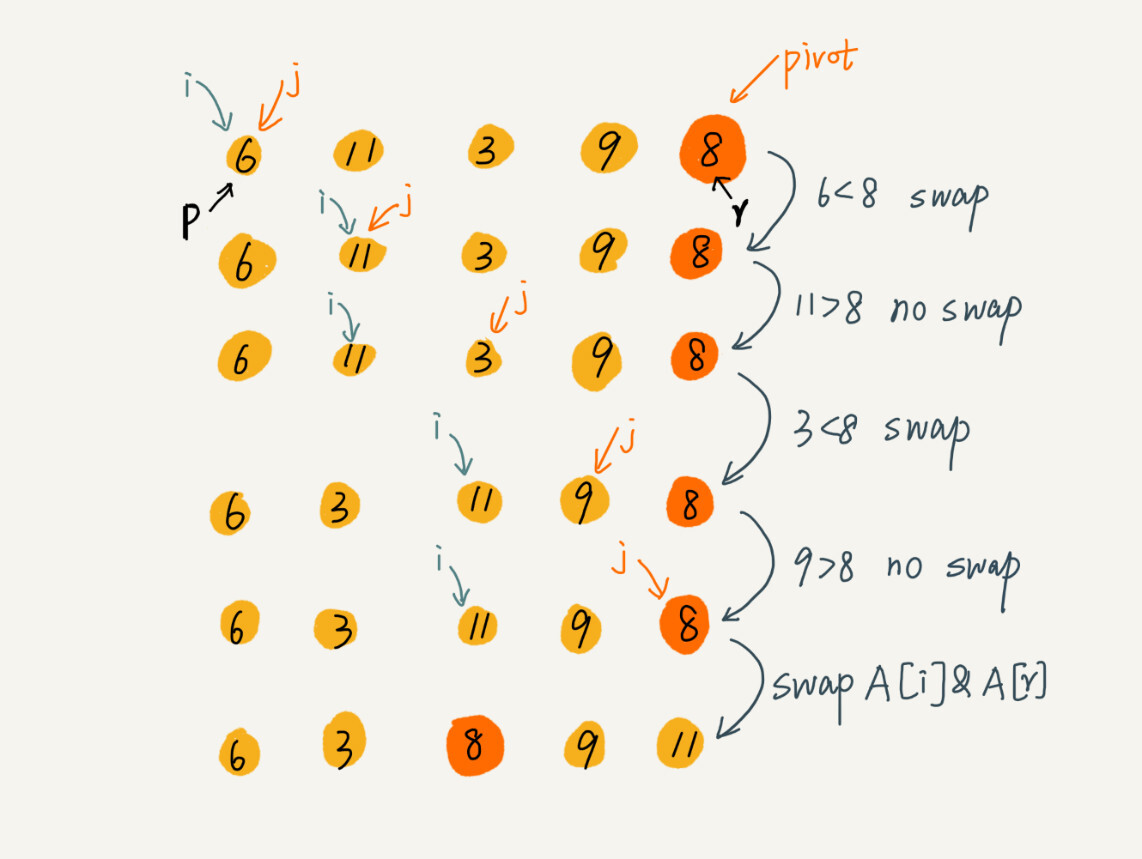
代码实现如下:
void merge_sort(int* arrays,int size){
merge_sort_c(arrays,0,size-1);
}
int partion(int* arr,int start,int end){
int pivot = arr[end];
int i = start;
for(int j=start;j<=end-1;++j){
if(arr[j] > pivot){
int temp = arr[j];
arr[j] = arr[i];
arr[i] = temp;
++i;
}
}
arr[end] = arr[i];
arr[i] = pivot;
return i;
}
void quick_sort_c(int* arr,int start,int end){
if(start >= end){
return;
}
int p = partion(arr,start,end);
quick_sort_c(arr,start,p-1);
quick_sort_c(arr,p+1,end);
}
void quick_sort(int* arr,int size){
quick_sort_c(arr,0,size-1);
}
int main(){
int nums[6] = {4,5,3,1,2,6};
quick_sort(nums,6);
for(int i=0;i<6;++i){
cout << nums[i] << endl;
}
}分析:
1.空间复杂度:从代码中可以看到,它是在原来数组上进行的操作,因此它是原地算法。
2.稳定性 :因为有数据的交换,因此它是不稳定的算法。
3.时间复杂度:我们假设每一次分区函数都能够将p分到中间,那么最好时间复杂度就是O(nlogn),另外如果每一次p都在最后,那么快速排序就退化为O(n^2)了。平均呢?由于结算起来非常复杂,这里直接给出结论:快速排序在大部分情况下的时间复杂度都为O(nlogn),只有极少数为O(n^2)。
桶排序
思路:核心的思想是将要排序的数据分到几个有序的桶里,每个桶里的数据再单独进行排序。桶内排完序之后,再把每个桶里的数据按照顺序依次取出,组成的序列就是有序的了。
- 1.找出待排序数组中的最大值max、最小值min
- 2.我们使用 动态数组vector作为桶,桶里放的元素也用 vector 存储。桶的数量为(max-min)/arr.length+1
- 3.遍历数组 arr,计算每个元素 arr[i] 放的桶
- 4.每个桶各自使用归并排序
- 5.遍历桶数组,把排序好的元素放进输出数组
这里给出代码的实现:
void bucket_sort(int* arr,int capacity){
// find the min_value and the max_value
int min_value = arr[0],max_value = arr[0];
for(int i=0;i<capacity;++i){
if(arr[i] < min_value){
min_value = arr[i];
}
if(arr[i] > max_value){
max_value = arr[i];
}
}
// get the buckets number
int buckets_num = (max_value - min_value) / capacity + 1;
vector<vector<int>> buckets(buckets_num);
// put the data into bucket
for(int i=0;i<capacity;++i){
int number = (arr[i] - min_value) / capacity;
buckets[number].push_back(arr[i]);
}
// merge_sort in the buckets
for(int i=0;i<buckets_num;++i){
merge_sort(&buckets[i][0],buckets[i].size());
}
// show the result
for(int i =0;i<buckets_num;++i){
for(size_t j=0;j<buckets[i].size();++j){
cout << buckets[i][j] << endl;
}
}
}分析:
1.时间复杂度:
如果要排序的数据有n个,我们把它们均匀划分到m个桶内,每一个桶就有 k = n/m个元素。每个桶内部使用归并或者快速排序,时间复杂度就为O(klogk)。m个桶排序的时间复杂度就为O(m*klogk),因为k = n /m,所以整个桶排序的时间复杂度就是O(n*log(n/m))。当桶的个数m接近数据个数n时,log(n/m)就是一个非常小的常量,整个时候桶排序的时间复杂度接近O(n)。从上面的代码分析可知,我们排序之前至少要遍历数据两遍,然后最后输出到一个数组的时候,也要遍历一遍,所以n前面有一个系数,但一般可忽略。
2.空间复杂度
首先桶的存在就需要占用内存了,因此它的空间复杂度是O(n),另外如果我们采用归并排序,还要额外消耗空间。
3.稳定性
桶排序的稳定性取决于桶内部使用的排序算法,如果使用快速排序,它就是一个不稳定的算法,如果使用归并排序,那它就是一个稳定的算法。
适用场景:
这样看来桶排序十分优秀,那么能否取代我们之前的算法?
当然是否定的,首先,要排序的数据需要很容易划分成m个桶,而且,桶与桶之间有着天然的大小顺序。这样每个桶内的数据都排完序之后,桶与桶之间的数据不需要再进行排序。
我们还要保证,数据在各个桶之间的分布是比较均匀的。如果数据经过桶的划分之后,有些桶里的数据非常多,有些非常少,很不均匀,那桶内数据排序的时间复杂度就不是常量级了。在极端情况下,如果数据都被划分到一个桶里,那就退化为O(nlogn)的排序算法了。
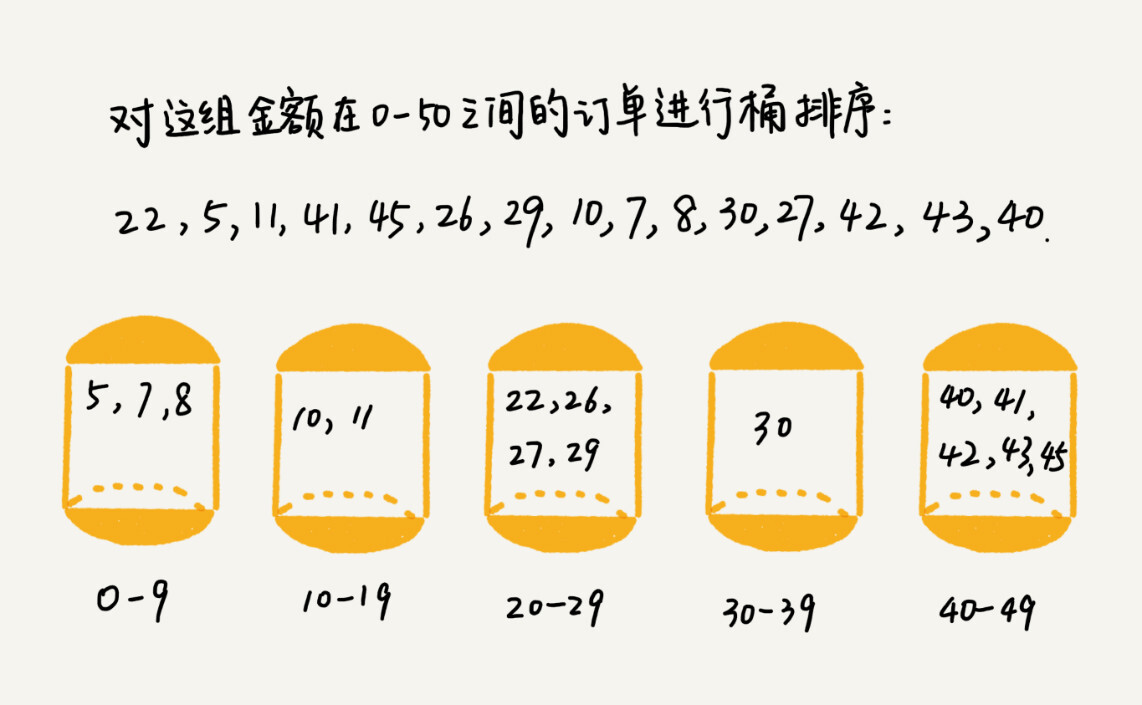
桶排序比较适合用在外部排序中。所谓外部排序就是数据储存在外部磁盘中,数据量很大,内存有限,无法将数据全部加载到内存中。
比如你有10GB的订单数据,我们希望按订单金额进行排序,但是我们的内存有限,只有几百mb,这个时候就适合用桶排序了。我们先扫描一遍文件,找到最小,最大值。然后假设根据金额划分到100个桶里,我们依次取一个桶进行快速排序(不选归并是因为占空间)然后把排序后的结果写到磁盘,重复直到桶没有了。
计数排序
其实,计数排序可以看做是桶排序的特例。当要排序的数据n所处的范围不大,比如最大值是k,那么我们直接把数据划分成k个桶。每个桶内的数据值都是相同的,省掉了桶内排序的时间。(与桶排序不同,桶排序的值的所处范围可以大于n,但是要易于划分)。
举个例子,比如高考的成绩查询系统,假设你所在的省有50万考生,考试分数的范围为0-900,这个数据的范围很小,所以我们可以分成901个桶。桶内的数据都是分数相同的学生,所以不再需要排序。我们值需要遍历即可,找到范围,然后再遍历一遍,把数据放在桶内,然后依次将桶内的考试输出到一个数组内,就完成了。时间复杂度是O(n)。
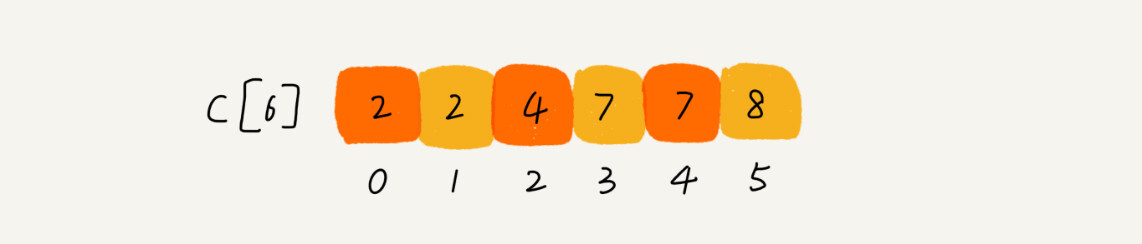
那么应该如何实现呢?我们通过一个实际的例子来。假设现在只有8个学生,分数在0到5之间。这8个选手的成绩我们放在数组score[8]里面,它们分别为:2,5,3,0,2,3,0,3。
我们遍历一次,得到score数组所处的范围为0到5,我们创建6个桶,使用一个buckets[6] 数组来表示。其下标对于分数,但储存的是考生的个数。我们只要遍历一遍考生分数,就能得到buckets数组。
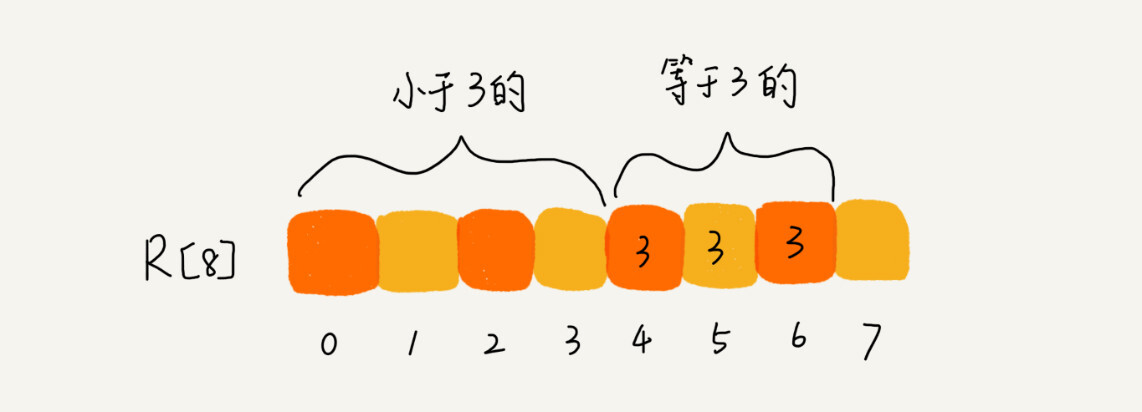
从图中,我们可以看出,分数为3的分考生有3个,,小于3分的有4个。我们创建一个有序的数组sort_score[8],所以成绩为3分的考生在排序之后的有序数组R[8]中,会保存下标4,5,6的位置。
我们如何快速计算出,每个分数的考生在有序数组中对应的存储位置呢?这个处理的方法很巧妙,很不容易想到。
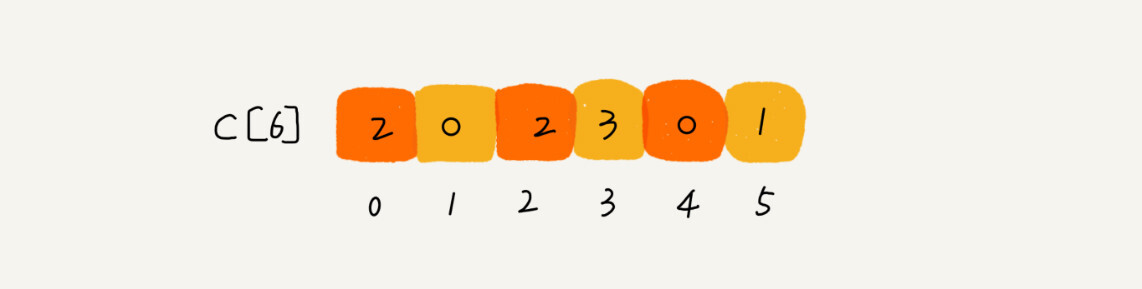
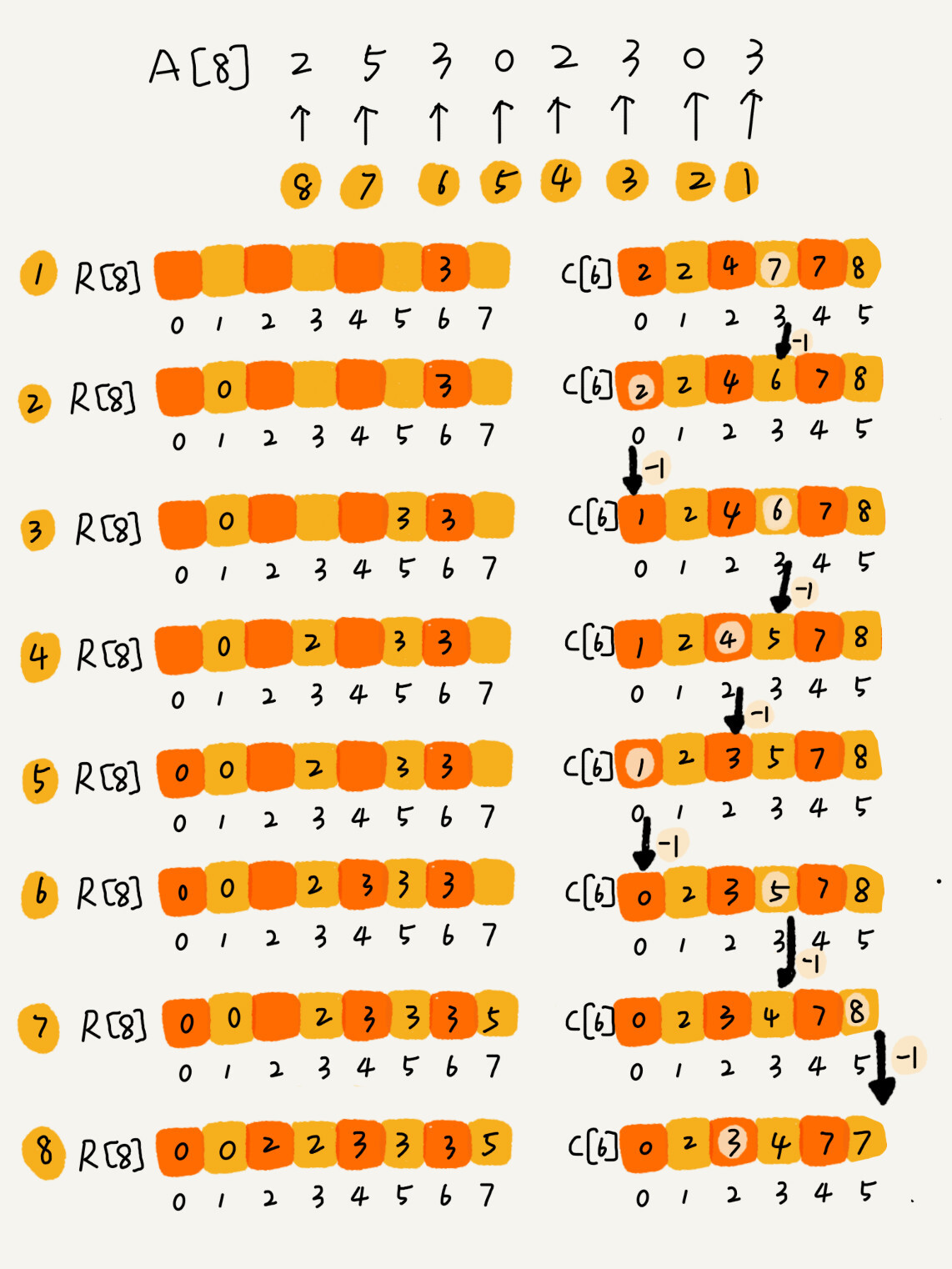
思路是这样的,我们对buckets[6]数组顺序求和,buckets[6]储存的数据就变成下面这样子。buckets[k] 里储存小于等于分数k的考生个数。
我们从后往前(为了稳定性)扫描原始数组score。比如扫描到3时,我们可以从数组score中取出下标为3的值7,也就是说,到目前为止,包括自己在内,分数小于等于3的考生有7个,也就是说3是数组sort_score中的第七个元素(下标为6)。当3放入到数组sort_score的时候,小于等于3的元素就只有6个了,所以buckets[3] 要减1,变成6。可以根据下面的图弄清楚。
这里给出代码实现:
void countingSort(int* arrays,int capacity){
if(capacity <= 1) return;
// 查找数组中数据的范围
int max = arrays[0];
for(int i=1;i<capacity;++i){
if(arrays[i] > max){
max = arrays[i];
}
}
// 计数数组赋值
int count_array[max+1] = {0};
for(int i =0;i<capacity;++i){
count_array[arrays[i]]++;
}
// 依次累加
for(int i=1;i<max+1;++i){
count_array[i] = count_array[i] + count_array[i-1];
}
// 申请一个排序之后的数组
int* temp = new int[capacity];
for(int i = capacity-1;i>=0;--i){
int row_value = arrays[i]; // 得到未排序的数据
int index = count_array[row_value] - 1;// 得到计数数组的位置-1,得到索引
temp[index] = arrays[i];// 将值赋给temp数组
count_array[row_value]--;// 计数减1
}
// 将结果拷贝回去
for(int i=0;i<capacity;++i){
arrays[i] = temp[i];
}
}分析:
1.时间复杂度:
整个算法的过程只需要有限次的遍历,因此算法复杂度是O(n)。
2.空间复杂度:
由于我们需要一个temp的数组来储存排序后的数据,因此空间复杂度为O(n)。
3.稳定性:
我们从后往前开始遍历数组,可以保证算法是稳定的。
适用场景:
计数排序只能用在数据范围不大的场景中,如果数据范围k要比排序的数据n大很多,就不适合计数排序了。而且,计数排序只能给非负整数排序,如果要排序的数据是其他类型的,要将其在不改变相对大小的情况下,转换为非负整数。
基数排序
假设现在有这样一个问题,我们有10万个手机号码,希望将这10万个手机号码从小到达排序。有什么快速的排序方法?
如果我们使用之前的快速排序,时间复杂度可以做到O(nlogn),手机号码有11位,范围太大,显然不适合用这两种排序算法。那么有没有时间复杂度是O(n)的算法呢?
刚刚这个问题有这样的规律,假设比较两个手机a,b的大小,如果在前面几位中,a手机号码已经b手机号码大了,那后面的几位就不用看了。
借助稳定的排序算法,这里有一个巧妙的实现思路,先按照最后一位来排序手机号码,然后,再按照倒数第二位重新排序,以此类推,最好按照第一位重新排序。经过11次排序之后,手机号码就有序了。注意,每一位的排序都要保证稳定,否则就没有意义了。还有,要排序的数据不一定都是等长的,比如我们排序牛津字典中的20万个英文单词,最短的只有1个字母,最长的有45,对于这种不等长的数据,我们可以把所有的单词补齐到相同的长度,位数不够可以在后面加0。因为根据ASCII值,所有字母大于0。
总结一下,基数排序对要排序的数据是有要求的,需要可以分割而出独立的“位”来比较,而且位之间有递进的关系,如果a数据的高位比b的数据大,那剩下的低位就不用比较了。除此之外,每一位的数据范围不能太大,要可以用线性排序算法来排序,否则,基数排序的时间复杂度就无法做到O(n)。