OCI
Open Container Initiative,也就是常说的OCI,是由多家公司共同成立的项目,并由linux基金会进行管理,致力于container runtime的标准的制定和runc的开发等工作。
官方的介绍是
An open governance structure for the express purpose of creating open industry standards around container formats and runtime. – Open Containers Official Site
所谓container runtime,主要负责的是容器的生命周期的管理。oci的runtime spec标准中对于容器的状态描述,以及对于容器的创建、删除、查看等操作进行了定义。
目前主要有两个标准文档:容器运行时标准 (runtime spec)和 容器镜像标准(image spec)。
这两个协议通过 OCI runtime filesytem bundle 的标准格式连接在一起,OCI 镜像可以通过工具转换成 bundle,然后 OCI 容器引擎能够识别这个 bundle 来运行容器。
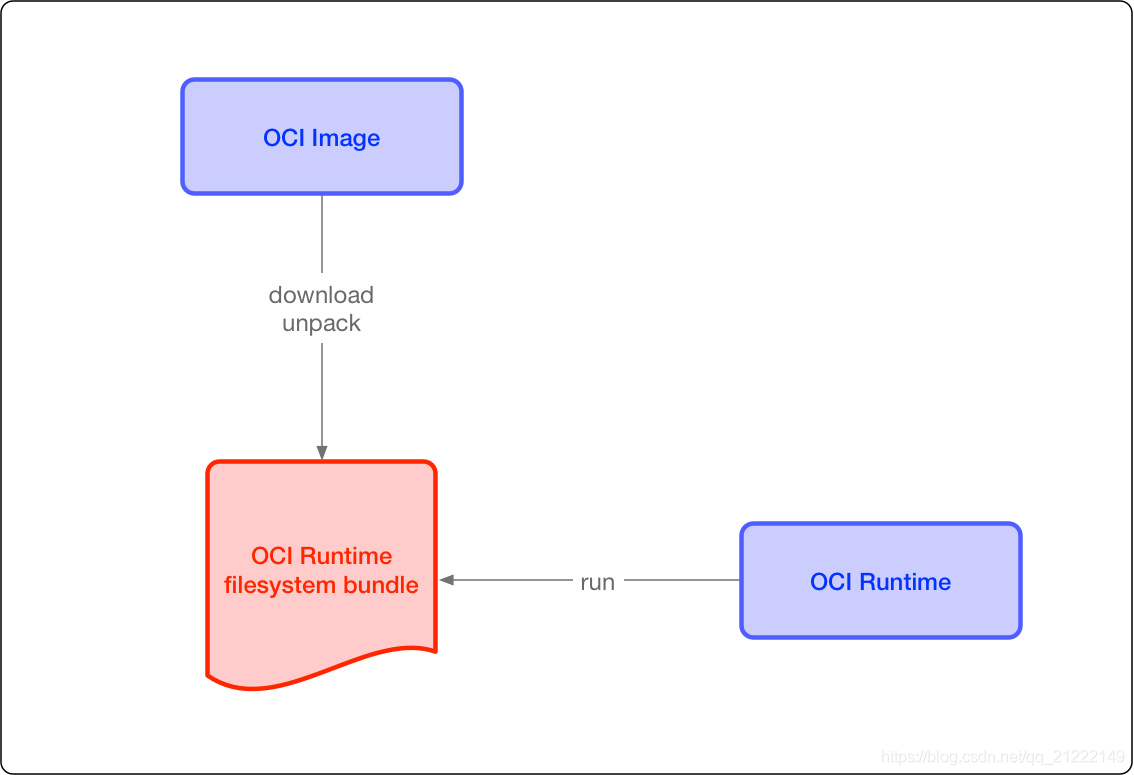
image spec
OCI 容器镜像主要包括几块内容:
文件系统:以 layer 保存的文件系统,每个 layer 保存了和上层之间变化的部分,layer 应该保存哪些文件,怎么表示增加、修改和删除的文件等
config 文件:保存了文件系统的层级信息(每个层级的 hash 值,以及历史信息),以及容器运行时需要的一些信息(比如环境变量、工作目录、命令参数、mount 列表),指定了镜像在某个特定平台和系统的配置。比较接近我们使用 docker inspect <image_id> 看到的内容
manifest 文件:镜像的 config 文件索引,有哪些 layer,额外的 annotation 信息,manifest 文件中保存了很多和当前平台有关的信息
index 文件:可选的文件,指向不同平台的 manifest 文件,这个文件能保证一个镜像可以跨平台使用,每个平台拥有不同的 manifest 文件,使用 index 作为索引
runtime spec
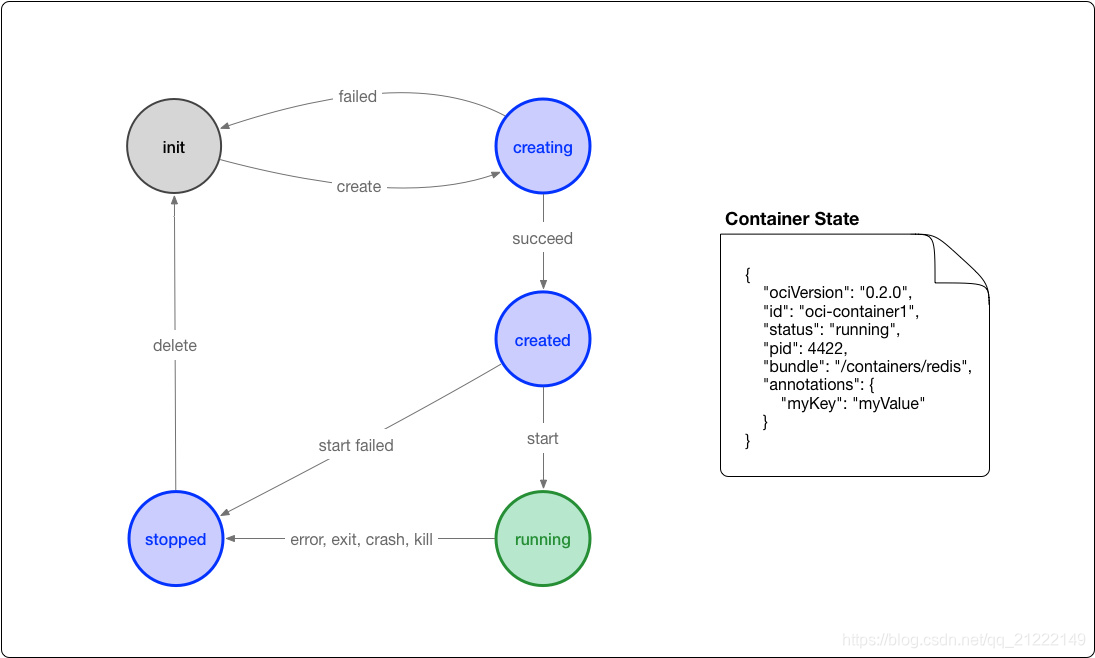
OCI 对容器 runtime 的标准主要是指定容器的运行状态,和 runtime 需要提供的命令。下图可以是容器状态转换图:
Docker CLI
/usr/bin/docker
Docker 的客户端工具,通过CLI与 dockerd API 交流。 CLI 的例子比如docker build … docker run …
Docker Daemon
/usr/bin/dockerd
作为Docker容器管理的守护进程,Docker Daemon从最初集成在docker命令中(1.11版本前),到后来的独立成单独二进制程序(1.11版本开始),其功能正在逐渐拆分细化,被分配到各个单独的模块中去。从Docker服务的启动脚本,也能看见守护进程的逐渐剥离:
在Docker 1.8之前,Docker守护进程启动的命令为:
docker -d
这个阶段,守护进程看上去只是Docker client的一个选项。

Docker 1.8开始,启动命令变成了:
docker daemon
这个阶段,守护进程看上去是docker命令的一个模块。
Docker 1.11开始,守护进程启动命令变成了:
dockerd
此时已经和Docker client分离,独立成一个二进制程序了。
当然,守护进程模块不停的在重构,其基本功能和定位没有变化。和一般的CS架构系统一样,守护进程负责和Docker client交互,并管理Docker镜像、容器。
Containerd
/usr/bin/docker-containerd
containerd是容器技术标准化之后的产物,为了能够兼容OCI标准,将容器运行时及其管理功能从Docker Daemon剥离。理论上,即使不运行dockerd,也能够直接通过containerd来管理容器。(当然,containerd本身也只是一个守护进程,容器的实际运行时由后面介绍的runC控制。)
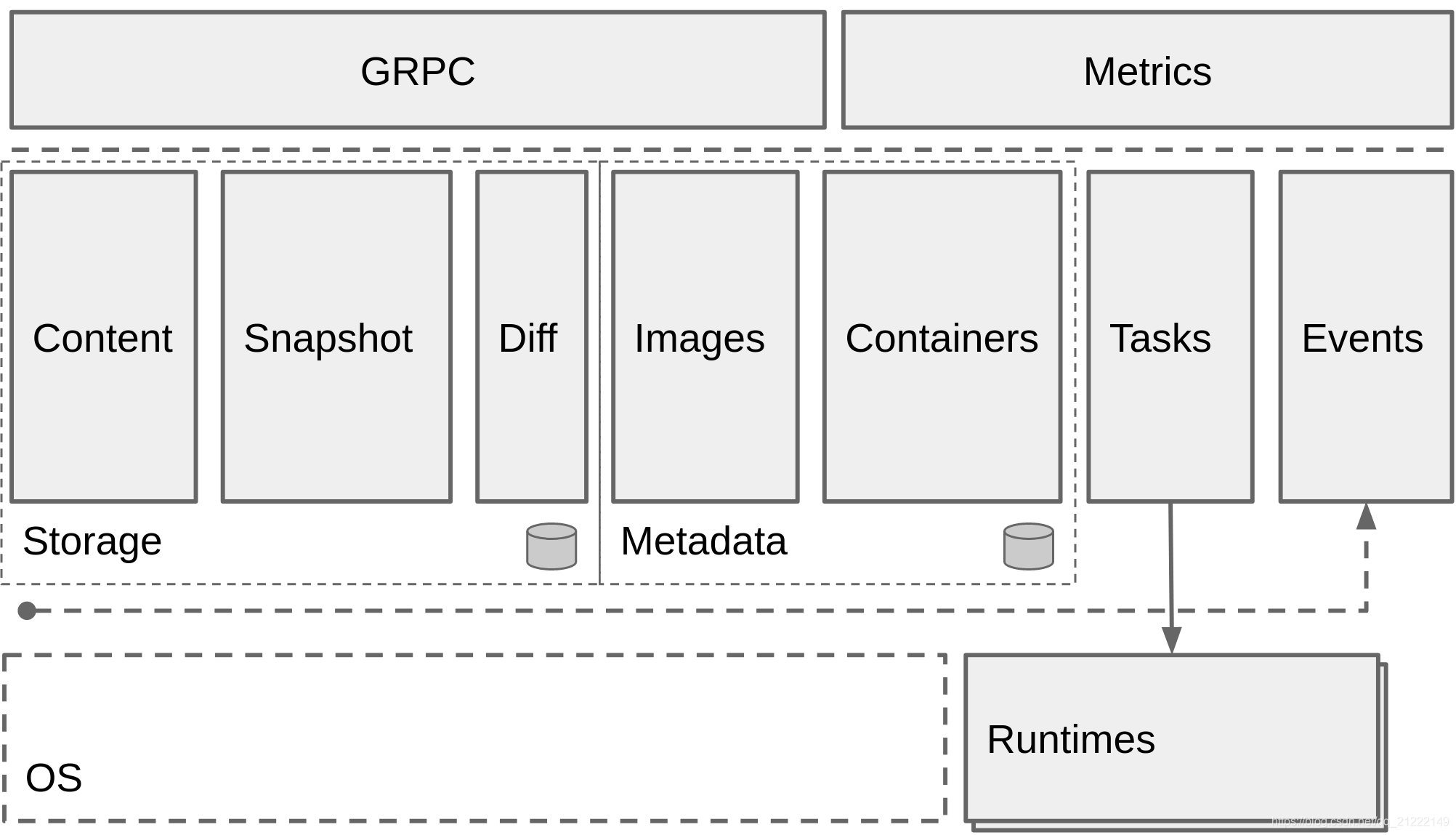
最近,Docker刚刚宣布开源containerd。从其项目介绍页面可以看出,containerd主要职责是镜像管理(镜像、元信息等)、容器执行(调用最终运行时组件执行)。
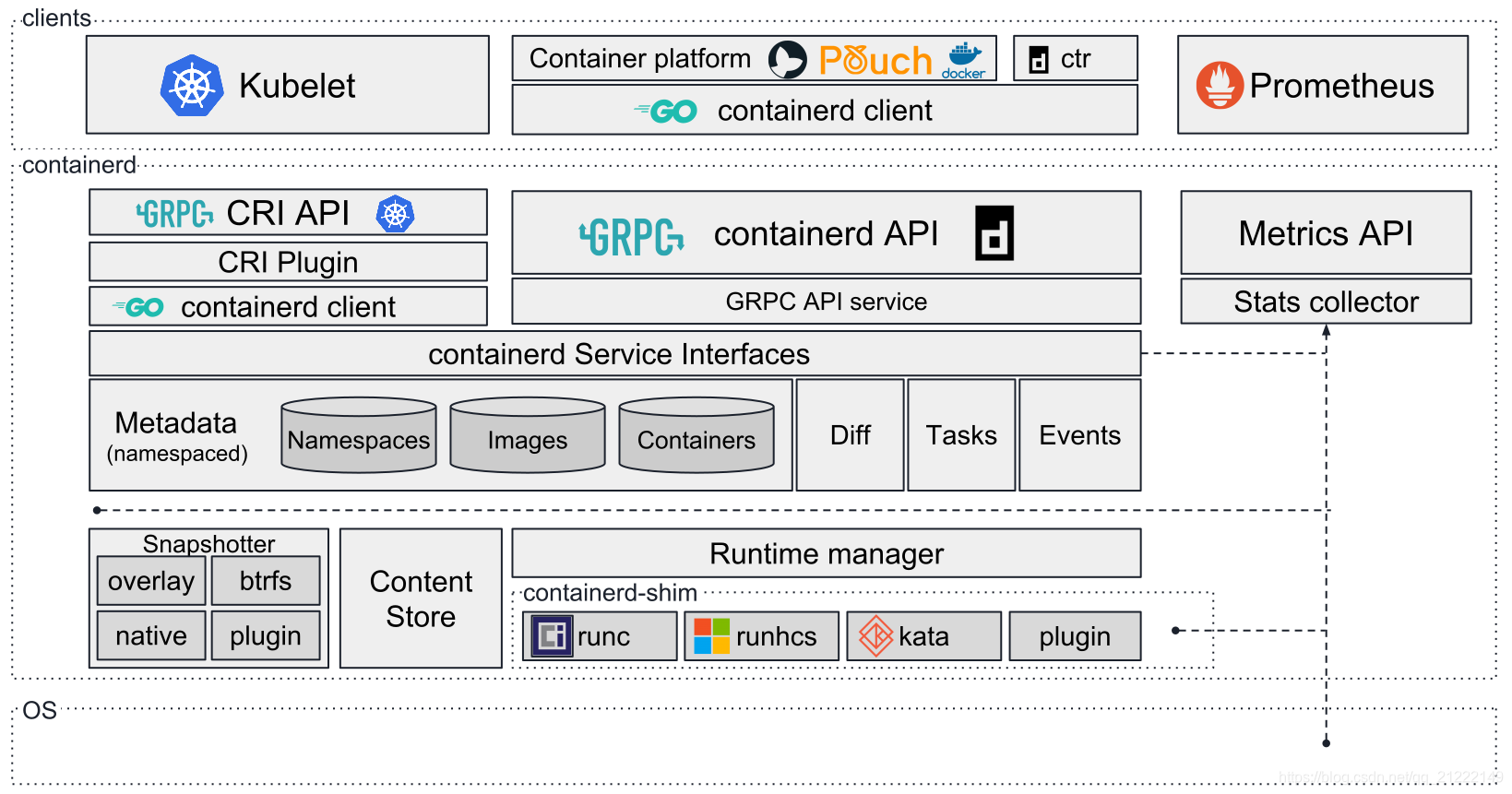
containerd向上为Docker Daemon提供了gRPC接口,使得Docker Daemon屏蔽下面的结构变化,确保原有接口向下兼容。向下通过containerd-shim结合runC,使得引擎可以独立升级,避免之前Docker Daemon升级会导致所有容器不可用的问题。
containerd fully leverages the OCI runtime specification1, image format specifications and OCI reference implementation (runc).
containerd includes a daemon exposing gRPC API over a local UNIX socket. The API is a low-level one designed for higher layers to wrap and extend. Containerd uses RunC to run containers according to the OCI specification.
docker-shim
/usr/bin/docker-containerd-shim
每启动一个容器都会起一个新的docker-shim的一个进程.
他直接通过指定的三个参数来创建一个容器:
- 容器id
- boundle目录(containerd的对应某个容器生成的目录,一般位于:/var/run/docker/libcontainerd/containerID)
- 运行是二进制(默认为runc)来调用runc的api(比如创建容器时,最后拼装的命令如下:runc create 。。。)
他的作用是:
- 它允许容器运行时(即 runC)在启动容器之后退出,简单说就是不必为每个容器一直运行一个容器运行时(runC)
- 即使在 containerd 和 dockerd 都挂掉的情况下,容器的标准 IO 和其它的文件描述符也都是可用的
- 向 containerd 报告容器的退出状态
前两点尤其重要,有了它们就可以在不中断容器运行的情况下升级或重启 dockerd(这对于生产环境来说意义重大)。
runc (OCI reference implementation)
/usr/bin/docker-runc
OCI定义了容器运行时标准OCI Runtime Spec support (aka runC),runC是Docker按照开放容器格式标准(OCF, Open Container Format)制定的一种具体实现。
runC是从Docker的libcontainer中迁移而来的,实现了容器启停、资源隔离等功能。Docker默认提供了docker-runc实现,事实上,通过containerd的封装,可以在Docker Daemon启动的时候指定runc的实现。
我们可以通过启动Docker Daemon时增加–add-runtime参数来选择其他的runC现。例如:
docker daemon --add-runtime "custom=/usr/local/bin/my-runc-replacement"
runc 代码探究
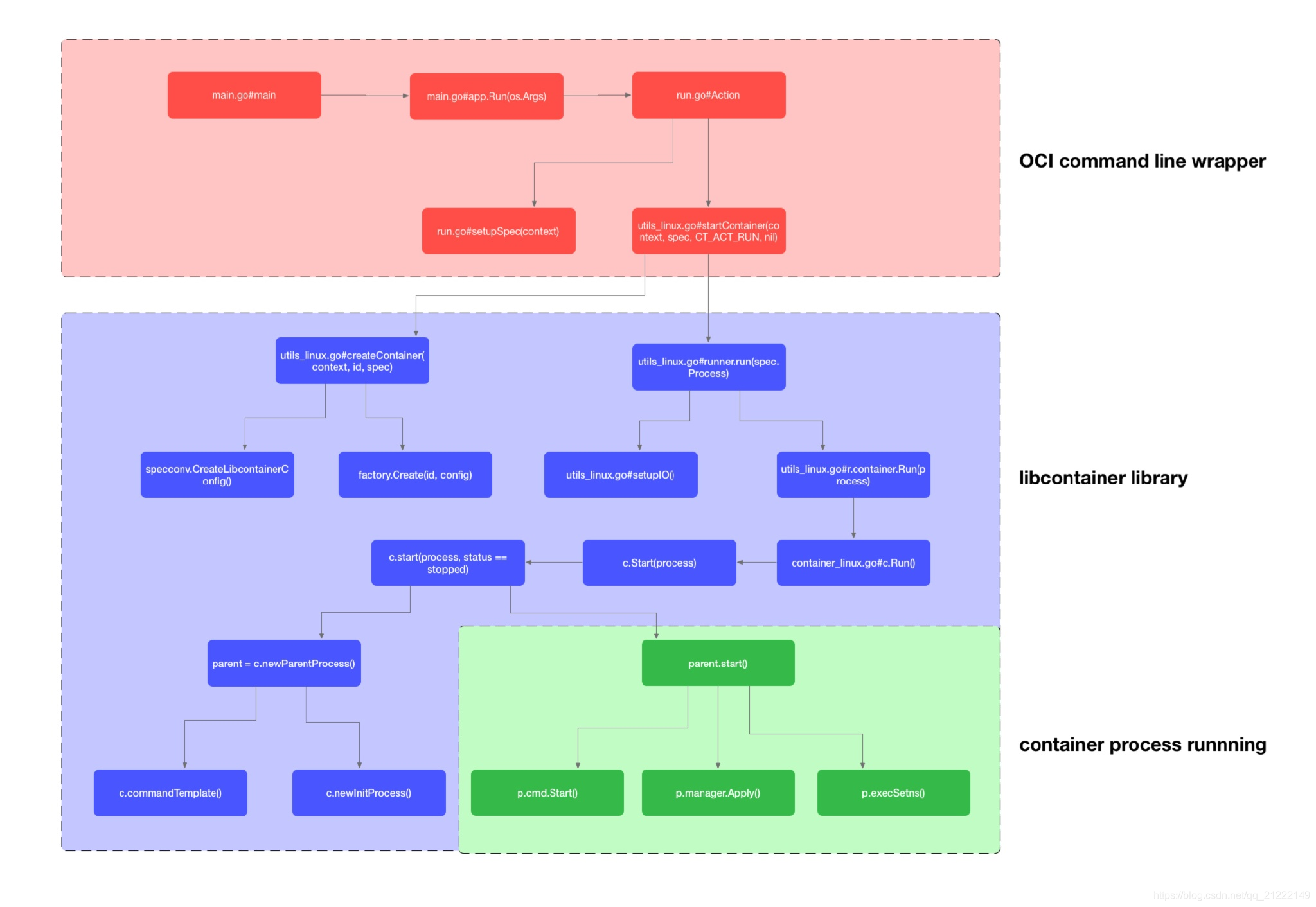
不通过docker 而通过runc来启动一个container的过程
首先,需要创建容器标准包,这部分实际上由containerd的bundle模块实现,将Docker镜像转换成容器标准包。
mkdir my_container
cd my_container
mkdir rootfs
docker export $(docker create busybox) | tar -C rootfs -xvf -
上述命令将busybox镜像解压缩到指定的rootfs目录中。如果本地不存在busybox镜像,containerd还会通过distribution模块去远程仓库拉取。
现在整个my_container目录结构如下:
$ tree -d my_container/
my_container/
└── rootfs
├── bin
├── dev
│ ├── pts
│ └── shm
├── etc
├── home
├── proc
├── root
├── sys
├── tmp
├── usr
│ └── sbin
└── var
├── spool
│ └── mail
└── www
17 directories
此时,标准包所需的容器数据已经准备完毕,接下来我们需要创建配置文件:
docker-runc spec
此时会生成一个名为config.json的配置文件,该文件和Docker容器的配置文件类似,主要包含容器挂载信息、平台信息、进程信息等容器启动依赖的所有数据。
最后,可以通过runc命令来启动容器:
runc run busybox
注意,runc必须使用root权限启动。
执行之后,我们可以看见容器已经启动:
localhost my_container # runc run busybox
/ # ps aux
PID USER TIME COMMAND
1 root 0:00 sh
9 root 0:00 ps aux
此时,事实上已经可以不依赖Docker本身,如果系统上安装了runc包,即可运行容器。对于Gentoo系统来说,安装app-emulation/runc包即可。
当然,也可以使用docker-runc命令来启动容器:
localhost my_container # docker-runc run busybox
/ # ps aux
PID USER TIME COMMAND
1 root 0:00 sh
7 root 0:00 ps aux
Docker、containerd, containerd-shim和runc之间的关系

我们可以通过启动一个Docker容器,来观察进程之间的关联。
首先启动一个容器,
docker run -d busybox sleep 1000
然后通过pstree命令查看进程之间的父子关系(其中20708是dockerd的PID):
pstree -l -a -A 20708
输出结果如下:
$ pstree -l -a -A 20708
dockerd -H fd:// --storage-driver=overlay2
|-docker-containe -l unix:///var/run/docker/libcontainerd/docker-containerd.sock --metrics-interval=0 --start-timeout 2m --state-dir /var/run/docker/libcontainerd/containerd --shim docker-containerd-shim --runtime docker-runc
| |-docker-containe b9a04a582b66206492d29444b5b7bc6ec9cf1eb83eff580fe43a039ad556e223 /var/run/docker/libcontainerd/b9a04a582b66206492d29444b5b7bc6ec9cf1eb83eff580fe43a039ad556e223 docker-runc
| | |-sleep 1000
$ ps fxa | grep dockerd -A 3
#prints
2239 ? Ssl 0:28 /usr/bin/dockerd -H fd://
2397 ? Ssl 0:19 \_ docker-containerd -l unix:///var/run/docker/libcontainerd/docker-containerd.sock ...
15476 ? Sl 0:00 \_ docker-containerd-shim 3da7... /var/run/docker/libcontainerd/3da7.. docker-runc
15494 ? Ss 0:00 \_ sleep 60
我们能够看出,当Docker daemon启动之后,dockerd和docker-containerd进程一直存在。当启动容器之后,docker-containerd进程(也是这里介绍的containerd组件)会创建docker-containerd-shim进程,其中的参数b9a04a582b66206492d29444b5b7bc6ec9cf1eb83eff580fe43a039ad556e223就是要启动容器的id。最后docker-containerd-shim子进程,已经是实际在容器中运行的进程(既sleep 1000)。
docker-containerd-shim另一个参数,是一个和容器相关的目录/var/run/docker/libcontainerd/b9a04a582b66206492d29444b5b7bc6ec9cf1eb83eff580fe43a039ad556e223,里面的内容有:
├── config.json
├── init-stderr
├── init-stdin
└── init-stdout
其中包括了容器配置和标准输入、标准输出、标准错误三个管道文件。
CRI
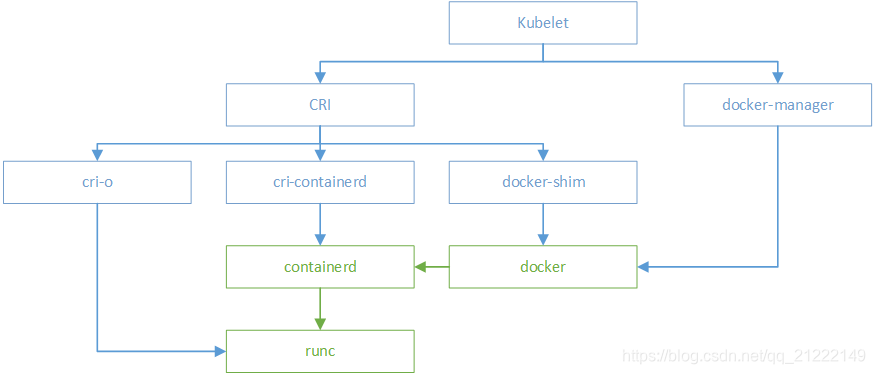
kubernetes在初期版本里,就对多个容器引擎做了兼容,因此可以使用docker、rkt对容器进行管理。以docker为例,kubelet中会启动一个docker manager,通过直接调用docker的api进行容器的创建等操作。
在k8s 1.5版本之后,kubernetes推出了自己的运行时接口api–CRI(container runtime interface)。cri接口的推出,隔离了各个容器引擎之间的差异,而通过统一的接口与各个容器引擎之间进行互动。
与oci不同,cri与kubernetes的概念更加贴合,并紧密绑定。cri不仅定义了容器的生命周期的管理,还引入了k8s中pod的概念,并定义了管理pod的生命周期。在kubernetes中,pod是由一组进行了资源限制的,在隔离环境中的容器组成。而这个隔离环境,称之为PodSandbox。在cri开始之初,主要是支持docker和rkt两种。其中kubelet是通过cri接口,调用docker-shim,并进一步调用docker api实现的。
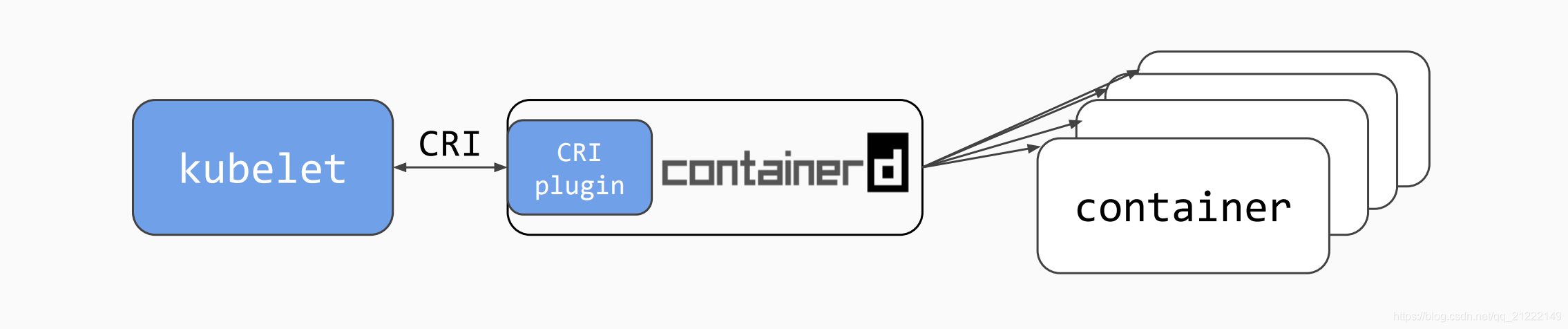
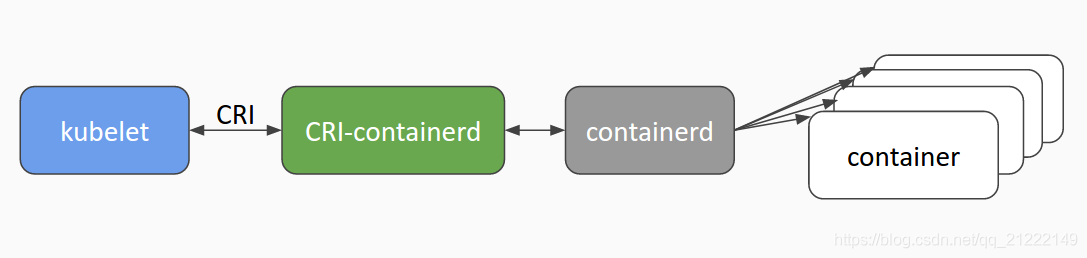
如上文所述,docker独立出来了containerd。kubernetes也顺应潮流,孵化了cri-containerd项目,用以将containerd接入到cri的标准中。
为了进一步与oci进行兼容,kubernetes还孵化了cri-o,成为了架设在cri和oci之间的一座桥梁。通过这种方式,可以方便更多符合oci标准的容器运行时,接入kubernetes进行集成使用。可以预见到,通过cri-o,kubernetes在使用的兼容性和广泛性上将会得到进一步加强。
参考
https://blog.csdn.net/warrior_0319/article/details/80073720
http://www.sel.zju.edu.cn/?p=840
http://alexander.holbreich.org/docker-components-explained/
https://www.cnblogs.com/sparkdev/p/9129334.html