ros wiki中指出
enable_pointcloud(bool,默认值:false)
指定是否启用本机pointcloud。默认情况下,由于性能问题,它设置为false。此选项折旧以支持rgbd_launch pointcloud,并将在不久的将来删除。
参数配置
enable_pointcloud 在 …/src/realsense-indigo-devel/realsense_camera/launch/includes/nodelet_rgbd.launch.xml
在该文件内将enable_pointcloud的值设为true
用catkin_make重新编译
运行
roslaunch realsense_camera r200_nodelet_rgbd.launch
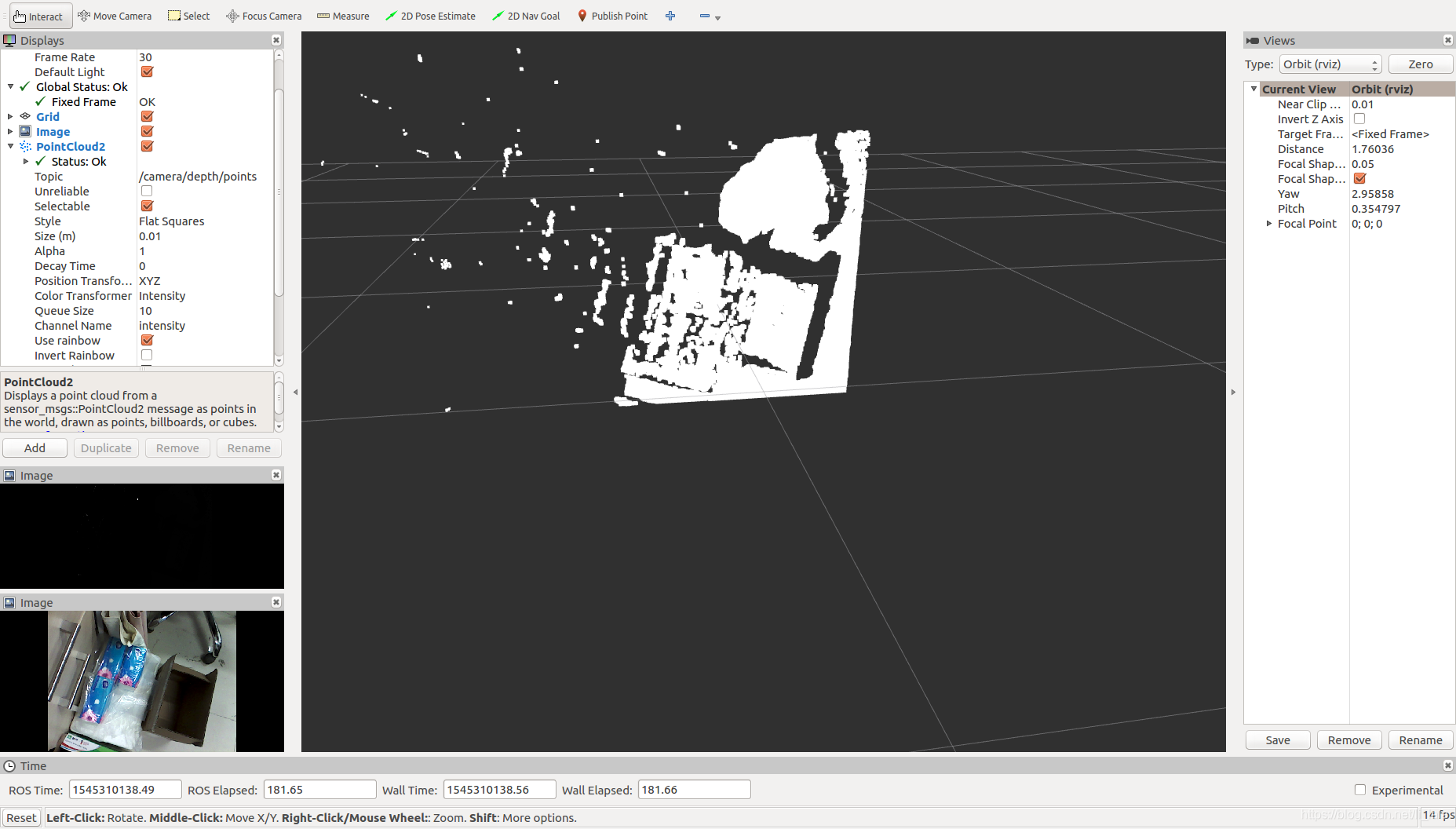
可以rviz中查看
室外点云获取
…/src/realsense-indigo-devel/realsense_camera/cfg/r200_params.cfg
手动开启自动曝光r200_lr_auto_exposure_enabled 设置为1