SuperMap 点云的使用
一.什么是点云
广义上来讲,通过测量得到的拥有xyz值的数据的集合都可以称之为点云数据;一般使用的点云数据都是通过三维坐标测量机或者三维激光扫描仪得到的点云数据。使用三维坐标测量机所得到的点数量比较少,点与点的间距也比较大,叫稀疏点云;而使用三维激光扫描仪或照相式扫描仪得到的点云,点数量比较大并且比较密集,叫密集点云。
点云通常作为一种精度高且采集速度快的方式,在测绘行业中使用,比如在林业中,通常用三维激光扫描仪测量树木的点云数据,从而可以精确的算出树木的材积量。
二.点云数据的基本组成
xyz值的坐标点及其属性(激光反射强度或者颜色信息),存储的方式类似于csv的样式,当然csv也可以是点云数据
以下是两个ASCII 数据格式的点云
三.常见的点云格式
通常用的点云格式las,laz,txt,xyz,ply
ASCII 点云:包括txt,txt,xyz,ply,csv等,优点是记忆灵活,读写方便,通常硬件设备可以普遍采用的存储方式,缺点是存储量大读写速度慢
las:LAS 是美国摄影测量与遥感协会 (ASPRS) 所创建和维护的行业格式。每个 LAS 文件都在页眉块中包含激光雷达测量的元数据,然后是所记录的每个激光雷达脉冲的所有记录。每个 LAS 文件的页眉部分都保留有激光雷达测量本身的属性信息:数据范围、飞行日期、飞行时间、点记录数、返回的点数、使用的所有数据偏移以及使用的所有比例因子。为 LAS 文件的每个激光雷达脉冲保留以下激光雷达点属性:x,y,z 位置信息、GPS 时间戳、强度、回波编号、回波数目、点分类值、扫描角度、附加 RGB 值、扫描方向、飞行航线的边缘、用户数据、点源 ID 和波形信息。
最初,激光雷达数据以 ASCII 格式交付。由于激光雷达数据集合非常庞大,所以不久之后,开始采用一种称为 LAS 的二进制格式来管理和标准化激光雷达数据的组织和传播方式。现在,以 LAS 表示的激光雷达数据十分常见。LAS 是一种可接受性更强的文件格式,因为 LAS 文件包含的信息更多,而且由于采用二进制,所以导入程序可以更高效地读取。
四.常用的点云处理软件,拿CloudCompare举例
CloudCompare是一款开源的点云处理软件,可以在CloudCompare的管网 http://www.cloudcompare.org/ 下载,当然,点云的处理软件不止CloudCompare这一种,可以根据情况选用不同的处理软件.这里就不多做叙述,大家可以参考其他关于CloudCompare操作的文章.
五.点云在iDesktop及web端的使用中的使用
1.生成list;
-
在“三维数据”选项卡的“点云”组中,单击“生成配置文件”按钮,弹出“生成点云配置文件”对话框,如下图所示。

图:“生成点云配置文件”对话框 -
源路径:单击右侧按钮,在弹出的“浏览文件夹”对话框中选择点云数据所在文件夹,单击“确定”按钮即可;也可在文本框中直接输入点云数据所在的文件夹路径。
-
目标文件(list):单击右侧按钮,在弹出的“打开”对话框选择保存路径并输入list文件的名称;也可在文本框中直接输入目标文件的保存路径及名称。
-
文件格式:下拉选择当前点云数据的格式,目前支持las、txt、xyz、ply、laz四种格式的点云数据。 若选择las或ply或laz的文件格式,“xyz/txt格式的点云文件设置”不被激活。 若选择txt或xyz的文件格式,“xyz/txt格式的点云文件设置”被激活,需设置如下:
- 文件前十行数据:程序自动读取并显示源路径下点云文件的前十行文本;
- 数据格式:下拉选择点云存储所采用的信息格式类型,支持以下常用的格式类型。
- XYZ:采用XYZ坐标的格式。
- XYZ_Reflectance:采用XYZ坐标、反射强度格式。
- XYZ_Reflectance_RGB:采用XYZ坐标、反射强度、颜色信息的格式。
- XYZ_Reflectance_RGB_Normal:采用XYZ坐标、反射强度、颜色信息、表面法向量的格式。
- XYZ_Reflectance_Normal_RGB:采用XYZ坐标、反射强度、表面法向量、颜色信息的格式。
- XYZ_RGB:采用XYZ坐标、颜色信息的格式。
- XYZ_RGB_Reflectance:采用XYZ坐标、颜色信息、反射强度的格式。
- XYZ_RGB_Normal:采用XYZ坐标、颜色信息、表面法向量的格式。
- XYZ_RGB_Reflectance_Normal:采用XYZ坐标、颜色信息、反射强度、表面法向量的格式。
- XYZ_RGB_Normal_Reflectance:采用XYZ坐标、颜色信息、表面法向量、反射强度的格式。
- XYZ_Normal:采用XYZ坐标、表面法向量的格式。
- XYZ_Normal_RGB:采用XYZ坐标、表面法向量、反射强度的格式。
- XYZ_Normal_Reflectance_RGB:采用XYZ坐标、表面法向量、反射强度、颜色信息的格式。
- 数据分隔符:下拉选择点云数据各信息之间的分隔符类型,选择项有以下:
空格:以空格“ ”作分隔符。
逗号:以逗号“,”作分隔符。
冒号:以冒号“:”作分隔符。- RGB格式:下拉选择点云数据颜色值的表达范围类型,选择项有以下:
0-1:颜色值范围为0-1。
1-255:颜色值范围为1-255。
- 数据单位:用于设置点云数据的单位,默认为Meter,可以通过数据单位右侧的下拉箭头选择其他数据单位。提供的备选数据单位有Meter、Degree、Centimeter、Millimeter、Inch、Foot。
- 投影设置:用于设置点云数据的投影信息,默认选择平面坐标系,可根据需求修改:
- 平面坐标系:默认选择平面坐标系。
- 投影设置:选择“投影设置”单选框,单击右侧“设置…”按钮,即可在弹出的“投影设置”对话框中,选择程序提供的一种的投影,文本框中将显示所选投影的详细信息。
- 导入投影文件:选择“导入投影文件”单选框,单击右侧“选择”按钮,在弹出的“选择”窗口中,选择投影信息文件(*.xml)并导入即可,此时,下方文本框中会显示所选投影文件的详细信息。
- 插入点:用于设置点云数据的模型参考点坐标,请分别设置X、Y、Z坐标值,默认的插入点为(0,0,0)。
- 若需要进行坐标转换,勾选“坐标转换参数设置”,激活目标坐标系和参数系转换设置处的控件。
- 目标坐标系提供了两种设置方式,具体操作如下所述。设置好目标投影之后,右侧会显示目标投影的详细信息。
投影设置:选择“投影设置”单选框,单击 按钮,弹出“投影设置”窗口,设置目标投影。设置目标投影的具体操作,请参考“投影设置”窗口。
导入投影文件:选择“导入投影文件”单选框,单击其右侧的浏览按钮,在弹出的“选择”窗口中,选择投影信息文件并导入即可。支持导入 shape 投影信息文件(.shp;.prj)、MapInfo 交换格式(.mif)、MapInfo TAB 文件(.tab)、影像格式投影信息文件(.tif;.img;.sit)、投影信息文件(.xml)。 - 选择转换方法:单击“转换方法”标签右侧的下拉按钮,弹出的下拉菜单列表显示了系统提供的十种参考系转换的方法,用户可选择一种合适的参考系转换方法。关于转换方法的说明,请参考参照系转换方法说明,有关转换方法和适用范围请参考转换模型。
- 设置投影转换参数:不同的转换方法,“投影转换参数设置”对话框中自定义的参数存在差异。
选择的为三参数转换法,如 Geocentric Transalation、Molodensky 或 Molodensky Abridged,则“投影转换参数设置”对话框中的参数设置如下图所示:
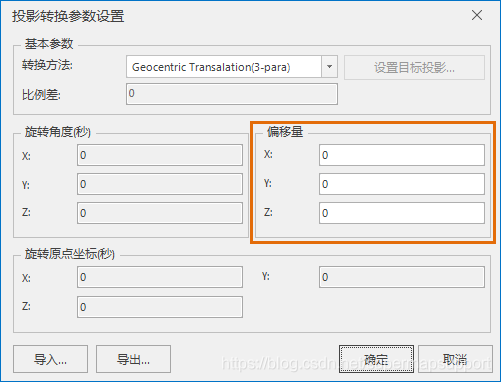
用户需要设置三个平移参数,即(ΔX,ΔY,ΔZ)。此种转换实质上是一种地心变换,从一个基准面的中心(0,0,0)转换到另一个基准面中心(ΔX,ΔY,ΔZ)。三参数变换是线性的平移变换,单位为米。
如选择的七参数转换法,如为 Position Vector、Coordinate Frame 或 Bursa-wolf,则“投影转换参数设置”对话框中的参数设置如下图所示:
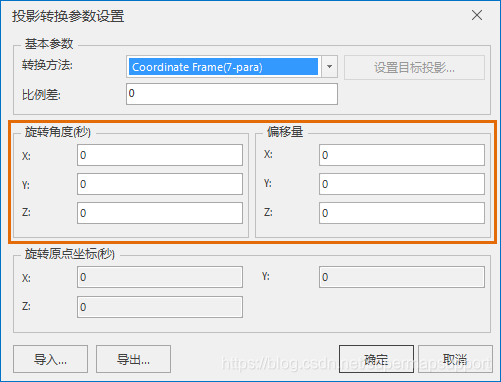
用户需要设置七个参数,即三个线性平移参数(ΔX,ΔY,ΔZ)、绕轴旋转的三个角度参数(Rx,Ry,Rz)和比例差(S)。平移参数以米为单位;旋转参数以秒为单位,取值范围在[-60,60]之间;而比例差为百万分之一(ppm)。
- 设置完以上参数后,单击“确定”按钮,即可执行生成配置文件的操作。
“生成配置文件”操作结果则是在目标文件下生成了一个*.list的配置文件,该文件可用于点云数据生成OSGB缓存。
2.生成缓存(追加模式和导入模式);
- 在“三维数据”选项卡的“点云”组中,单击“生成缓存”下拉按钮,选择“追加模式”或者“替换模式”。
-
追加模式
- 单击“追加模式”按钮,弹出“配置文件设置”,如下图所示。具体参数设置方法请参考:点云生成配置文件。
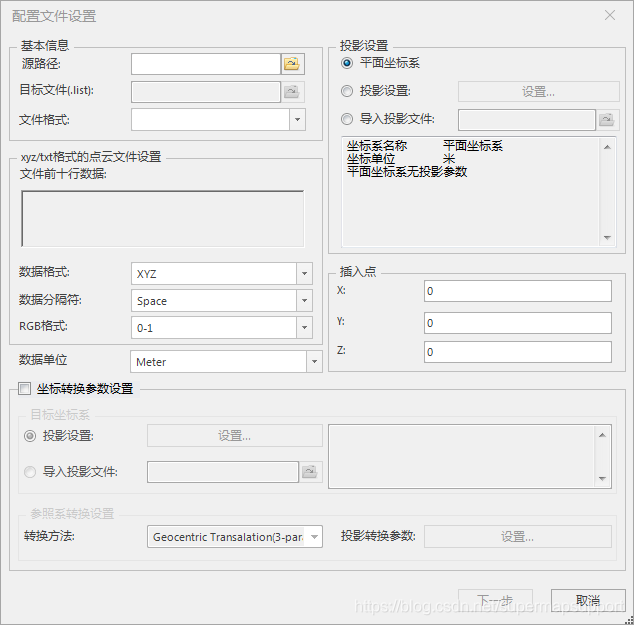
图:“配置文件设置”对话框 - 设置完参数后,单击“下一步”,,弹出“点云生成缓存”对话框,如下图所示。
- 单击“追加模式”按钮,弹出“配置文件设置”,如下图所示。具体参数设置方法请参考:点云生成配置文件。
-
替换模式
- 单击“替换模式”按钮,弹出“点云生成缓存”对话框,如下图所示。

图:“点云生成缓存”对话框
- 单击“替换模式”按钮,弹出“点云生成缓存”对话框,如下图所示。
- 配置文件:单击“配置文件(.list)”右侧按钮,在弹出的“浏览文件夹”对话框中选择点云配置文件,单击“打开”按钮即可;也可在文本框中直接输入点云配置文件所在的文件夹路径及名称。
- 缓存路径:单击“缓存路径”右侧按钮,在弹出的“浏览文件夹”对话框选择缓存文件的保存路径,单击“确定”按钮即可;也可在文本框中直接输入保存缓存文件路径。
- 缓存名称:输入字符串作为缓存的名称。
- 金字塔剖分类型:用于设置缓存切片创建树型金字塔的剖分类型。点云数量庞大,需要通过空间索引来建立合理的数据组织,以管理点云数据,程序提供了四叉树和八叉树两种方式。
- 四叉树:一种二维空间索引,根节点按照空间范围被划分为四个子区域而形成四个子节点。四叉树适用于平面范围大、高度上差值较小而不需要高度层级剖分的空间范围,如城市级别的建筑。
- 八叉树:八叉树是四叉树在三维空间的自然延伸,以空间内的一个点为基准将空间划分为八个区域而形成八个子树。八叉树适用于高度上值很大、平面范围较小的空间范围,如一栋高楼。
- 特征值:用于后期进行分层设色的属性字段,有高度、强度与类别三种特征值。单击右侧按钮,在下拉菜单中选择配置文件中含有的特征值。
- 生成法线信息:表面法线是几何体表面的重要属性,主要用于渲染时产生符合视觉习惯的光照效果。若点云已自带法线信息,不勾选;若点云不带法线且有渲染需求,勾选此项来为点云生成表面法线。
- 设置完以上参数后,单击“确定”按钮,即可执行点云生成缓存的操作。
生成完成后,在指定缓存路径下产生一个与缓存名称命名的文件夹,文件夹中包含一个*.SCP索引文件,以及多个存有*.osgb模型文件的文件夹,其结果如下图所示:
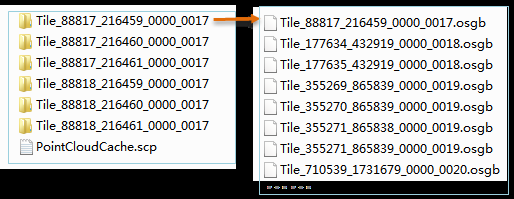
图:点云生成缓存结果
生成缓存后,在三维场景中可通过“添加三维切片缓存图层”的方式加载和浏览点云数据。
六.点云使用的注意事项
1.对机器硬件配置要求较高,无论是在cc中还是在iDesktop加载缓存;主要是固态硬盘和独立显卡
2.ASCII 编码的点云尽量先用cc转成las点云,再通过追加模式去生成缓存,追加模式无需生成list配置文件,以避免list生成速度慢及覆盖模式生成慢的问题