本教程翻译自https://blog.paperspace.com/how-to-implement-a-yolo-object-detector-in-pytorch/
视频展示:https://www.youtube.com/embed/8jfscFuP_9k(需要FQ)
深度学习的发展给目标检测任务带来了显著提升。近年来人们开发了许多用于目标检测的算法,包括YOLO、SSD、Mask RCNN和RetinaNet等。
在过去的几个月里,我一直在一个研究实验室致力于改进目标检测。这次经历中我最大的收获之一就是意识到学习目标检测最好的方法就是自己从头开始实现算法。这正是我们在本教程中要做的。
我们将使用PyTorch来实现一个基于YOLO v3的目标检测器,这是目前最快的目标检测算法之一。
本教程的代码设计为在Python 3.5和PyTorch 0.4上运行。你可以在Github repo上找到它的完整版本。本教程分为以下5个部分:
第1部分:理解YOLO的工作原理(本节)
第2部分:创建网络体系结构的层
第三部分:实现网络的前向传播
第4部分:目标评分阈值化和非极大值抑制
第5部分:输入和输出流程的设计
必备条件:
(1)您应该了解卷积神经网络是如何工作的,还有像残差块、跳层连接和上采样的知识。
(2)知道什么是目标检测、边界框回归、IoU和非极大值抑制。
(3)了解PyTorch的基本使用,能够轻松地创建简单的神经网络。
什么是YOLO:
YOLO字面意思就是你只看一次。它是一种基于深度卷积神经网络进行特征学习的目标检测器。在我们动手编写代码之前,我们必须了解YOLO是如何工作的。
全卷积神经网络:
YOLO只使用了卷积层,所以是一个全卷积网络(FCN)。它包含75个卷积层,以及跳层连接和上采样层。没有使用池化而使用一个步长为2的卷积层对特征图进行降采样来防止池化造成的特征丢失。作为一个FCN, YOLO本身不受输入图像大小的影响。然而,在实践中我们其实需要一个固定大小的输入尺寸。
这是因为我们想批量处理图像(批量图像可以由GPU并行处理,从而提高速度),就需要每一批中的图像维度一致。
网络通过卷积的步长对图像进行下采样。例如,如果网络的步长为32,那么大小为416 x 416的输入图像将产生大小为13 x 13的输出。
网络输出:
通常卷积层学习到的特征被送到最后的分类器/回归器上,分类器/回归器进行检测预测(边界框的坐标、类标签),在YOLO中,预测是通过使用1 x 1的卷积层来完成的。
首先要注意的是我们的输出是一个feature map。因为我们使用了1 x 1卷积,所以预测图的大小与之前的特征图的大小完全相同。在YOLO v3中,feature map的每个单元格可以预测固定数量的边界框。
虽然描述特征图中的一个单元的正确术语应该是神经元,但在我们的下文中,称它为细胞使它更直观。
Though the technically correct term to describe a unit in the feature map would be a neuron, calling it a cell makes it more intuitive in our context.
在深度上,我们在feature map中有 (B x (5 + C)) 维。B表示每个单元格可以预测的边界框数。根据这篇论文,B个边界框中的每一个可以都可以检测某个特殊物品。每个边界框都有5 + C 个属性,这些属性用于描述每个边界框的中心坐标、长宽、目标得分和C个物品类别置信度。YOLO v3中每个细胞预测3个标注框,也就是B=3。
如果目标的中心落在某个细胞的接受域内,则期望这个细胞通过它其中一个预测的边界框来预测对象。(接受域是细胞可见的输入图像区域。进一步说明请参考卷积神经网络的链接)。
这一设置这与YOLO的训练方式有关,也就是只有一个边界框负责检测给定的对象。为了做到这点,首先我们必须确定这个边界框属于哪个cell。
为此,我们将输入图像划分为与最终feature map相同维度的网格。
下面举例说明,如下输入图像是416 x 416,网络的步长是32。如前所述,feature map的尺寸为13 x 13。然后我们将输入图像分成13个x 13个单元格。

然后,选择包含对象真值边界框中心的单元格(在输入图像上)作为负责预测对象的单元格。上图中标记为红色的单元格包含ground truth框的中心(标记为黄色)。
红色的细胞是网格上第7行第7个细胞。我们便将feature map的第7行中的第7个细胞 (feature map上对应的cell) 指定为负责检测狗的cell。前面提到每个cell可以预测三个边界框。哪一个才是对应了狗的呢? 为了理解这一点,我们必须围绕锚的概念展开讨论。
Note that the cell we're talking about here is a cell on the prediction feature map. We divide the input image into a grid just to determine which cell of the prediction feature map is responsible for prediction
锚盒:
在实践中,我们不会预测边界框的宽度和高度因为这会导致训练的不稳定,现阶段大多数目标检测器都是预测一个对数空间的转换。
之后将这些转换加到锚点上来获得锚盒作为预测结果。YOLO v3有三个锚盒,也就对应了每个cell预测的三个边界框。
回到我们之前的问题上,负责检测狗的cell中的那个锚盒是与真实框中IoU最高的那个。
预测:
下面的公式描述了如何转换网络输出以获得边界框预测(最后两个公式就是前面提到的对数空间转换)。
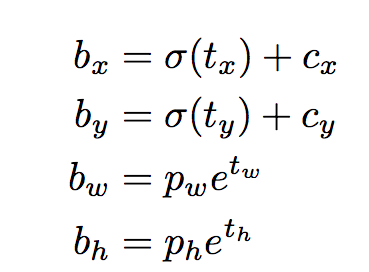
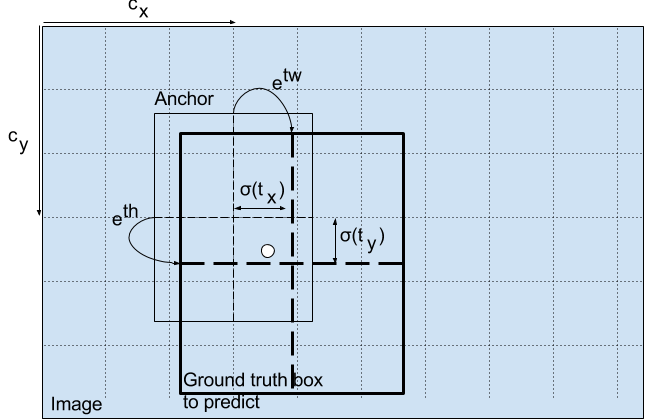
上式中bx, by, bw, bh分别对应预测的中心坐标,宽度和高度。tx, ty, tw, th是网络输出的值。cx和cy是网格的左上坐标。pw和ph是盒子的锚盒尺寸。下面对上式的含义以及cx,cy,pw,ph进行说明
中心坐标
我们通过一个sigmoid函数进行中心坐标预测,这是因为sigmoid能够迫使输出的值在0和1之间。可以看到YOLO没有预测边界框中心的绝对坐标,它预测的相对于检测目标的cell的左上角坐标(cx,cy)的偏移量,这一偏移量通过cell的尺寸大小标准化。
还是以上图狗为例。如果中心坐标的预测值为(0.4,0.7),则意味着实际中心位于13 x 13 feature map上的 (6.4,6.7) 。(因为红色cell的左上坐标是(6,6))。
如果预测的xy坐标大于1会发生什么?比如(1.2,0.7),这意味着中心在 (7.2,6.7) 处,那就到了第7行第8个cell。其实这是不可能的,因为如果我们假设红色cell负责预测狗,狗的中心就必须位于红色的cell中,这是yolo的规定。
边界框的尺寸
将预测的长宽(tw,th)经过对数空间变换,再与锚盒长宽(pw,ph)相乘来预测边界框的大小。
bw和bh也像cx,cy一样经过了标准化。因此包含狗的检测框的预测bw和bh为(0.3,0.8),那么在13x13 feature map上的实际宽度和高度为(13x0.3, 13x0.8)。
https://blog.paperspace.com/how-to-implement-a-yolo-object-detector-in-pytorch/