离散余弦变换
由于实信号傅立叶变换的共轭对称性,导致DFT后在频域中有一半的数据冗余。离散余弦变换(DCT)在处理实信号时比离散傅立叶(DFT)变换更具优势。在处理声音信号这类实信号时,DFT得到的结果是复功率谱,其结果中的一半数据是没利用价值的。相比之下,DCT得到的结果是实谱,从而节省了不必要的运算。
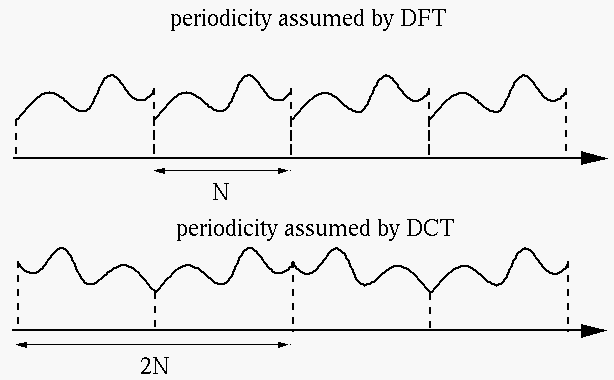
一个序列的DFT就是将其周期拓展后取其DFS系数的一个周期。如果序列的开始及结尾处的幅值差异较大,那么这个周期拓展的序列便会有较多的高频分量。
而序列的DCT(实序列)相当于一个长度是它两倍的实偶序列的DFT(普通序列的DFT=实序列+虚序列),在储存同样个数的数据的情况下,DCT的能量更集中在低频。
DCT还有一个很重要的性质(能量集中特性):大多书自然信号(声音、图像)的能量都集中在离散余弦变换后的低频部分,因而DCT在(声音、图像)数据压缩中得到了广泛的使用。由于DCT是从DFT推导出来的另一种变换,因此许多DFT的属性在DCT中仍然是保留下来的。(归一化之后,会在高频产生很多0系数,说明DCT比FFT变换具有更好的能量聚集度。)
DCT在图像处理中优于DFT的性质是更高的能量聚集度,根本原因是二维DCT和二维DFT变换空间的基底不同。二维DFT的变换空间基底(谐平面波分量)是由sin和cos平面波共同构成的。而二维DCT的变换空间基底(谐平面波分量)是由cos单独构成的。
图像经过二维DFT变换后,大部分能量集中在频谱空间的四个角落(低频分量);而图像经过二维DCT变换后,大部分能量集中在频谱空间的左上角(低频分量)。此所谓DCT的能量集中度优于DFT者也。
推导
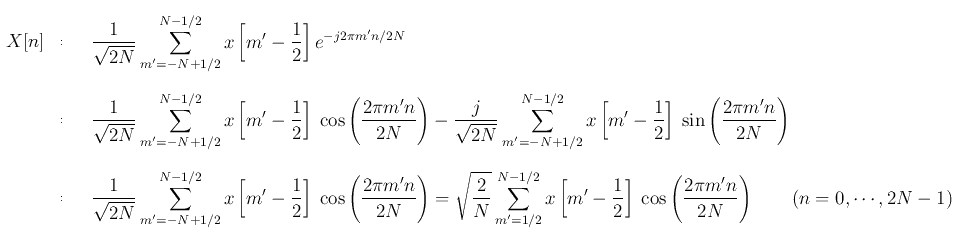
推导N点长实序列的DCT,首先来定义一个新的长度为2N的序列:

DCT可看作是将周期为N的序列x[m]做一个周期延拓成一个周期为2N的序列。如下图。

再来看第一张图是关于 x = -1/2 对称的,要让其关于x = 0对称需要将其向右平移1/2个单位,得到 x’[m] = x’[m – 1/2] 就是关于 x = 0对称的周期序列了(如第二张图)。

上述 2N 点的偶对称序列的 DFT计算过程为:
其中 是偶对称的,
是偶对称的, 分别是偶数和奇数。将
分别是偶数和奇数。将 替换为
替换为 ,可以得到DCT为:
,可以得到DCT为:
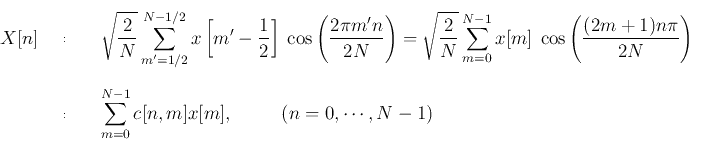
系数定义为c[n, m] ,则

有DCT系数矩阵C∈RN×N,上述为C的第n行第m列的元素。又因为在n=2N的周期内,X[n]=X[-n]是偶对称的。进一步有:

则n从N,...,2N-1的期间,X[n]是多余的,can be dropped。则n的范围变为0,...,N-1。除了第一个n=0,C的所有行向量都是正交归一化的:

为了使得DCT是正交变换,定义系数:
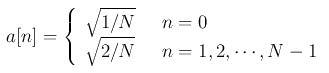
其中c[n, m]被a[n]修正。余弦变换矩阵为:
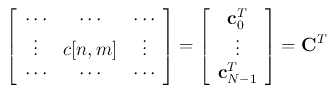 其中
其中  是DCT变换矩阵C的第i行。
是DCT变换矩阵C的第i行。
上述行向量都是正交的: ,则变换矩阵C也是正交的:
,则变换矩阵C也是正交的: ,且
,且 。
。
则DCT变换可以表示为矩阵形式: ,两边左乘C得到:
,两边左乘C得到:
逆DCT有: ,也可以表示为:
,也可以表示为:

总结
与 DFT 相比,DCT 有两个主要优点:
- 它是一种比 DFT 具有更好的计算效率的真实变换, 它的定义是一个复杂的变换。
- 它不引入间断, 同时在时间信号中施加周期性。在 DFT 中, 当时间信号被截断并假定为周期性时, 在时域中引入了不连续性, 并引入了相应的频率域中的工件。但是, 当截断时间信号时, 即使采用对称性, 也不会在 DCT 中引入间断和相关工件。
参考:http://fourier.eng.hmc.edu/e161/lectures/dct/node1.html
去相关性
在图像处理中,通常来说,正交变换具有去相关性。其中最理想的是KLT(Karhunen Lo`eve Transform ),DCT是KLT最大程度上的近似,在视频图像处理中被广泛应用。
从数学的角度上来看,去相关性就是把原取样点的自相关矩阵通过DCT变换,变成一个对角矩阵,而且对角线上的值是取样点自相关矩阵的特征值。这样一来,去相关后的矩阵保留了原矩阵的重要信息(特征值),而过滤到了一些不相关的量。这对后续的处理(比如量化、编码)都非常有意义,它使得矩阵变“瘦”,而关键信息不变,这样一来算是对原关键信息的一种增强,提高了后续的图像还原质量。
扩展
傅立叶变换的FT物理意义是将一个在时间域当中的信号所包含的所有频率分量(主要指其各频率分量的幅度和相位)用一个以角频率为自变量的函数表示出来,称其频谱。
但是并不是所有的信号都能取傅氏变换(例如当该信号不满足狄利特里条件时),所以在傅氏变换的积分函数中的积分因子上乘以一个exp(a),使之满足可积条件,是为拉氏变换。
傅里叶变换是拉氏变换的特例,相当于S平面虚轴上的拉氏变换
一个信号的抽样取拉氏变换与相应的离散信号与Z变换的作用是等效的。Z变换与拉氏变换之间是一对多的映射关系,Z平面上的单位圆对应于S平面上的虚轴;Z平面上的单位圆内部分对应于S平面上的左半平面;此外,S平面是直角坐标平面,Z平面则是极坐标平面。
离散傅里叶变换相当于是Z变换在Z平面单位圆上的情况(即是Z变换的特例)
FFT
FFT是离散傅立叶变换的快速算法,可以将一个信号变换到频域。
假设采样频率为Fs,信号频率F,采样点数为N。那么FFT之后结果就是一个为N点的复数。每一个点就对应着一个频率点。这个点的模值,就是该频率值下的幅度特性。具体跟原始信号的幅度有什么关系呢?假设原始信号的峰值为A,那么FFT的结果的每个点(除了第一个点直流分量之外)的模值就是A的N/2倍。 而第一个点就是直流分量,它的模值就是直流分量的N倍。而每个点的相位呢,就是在该频率下的信号的相位。第一个点表示直流分量(即0Hz),而最后一个点 N的再下一个点(实际上这个点是不存在的,这里是假设的第N+1个点,可以看做是将第一个点分做两半分,另一半移到最后)则表示采样频率Fs,这中间被 N-1个点平均分成N等份,每个点的频率依次增加。
Fn所能分辨到频率为 Fs/N,如果采样频率Fs为1024Hz,采样点数为1024点,则可以分辨到1Hz。1024Hz的采样率采样1024点,刚好是1秒,也就是说,采样1秒时间的信号并做FFT,则结果可以分析到1Hz,如果采样2秒时间的信号并做FFT,则结果可以分析到0.5Hz。如果要提高频率分辨力,则必须增加采样点数,也即采样时间。频率分辨率和采样时间是倒数关系。
假设采样频率为Fs,采样点数为N,做FFT之后,某一点n(n从1开始)表示的频率为:Fn=(n-1)*Fs/N;该点的模值除以N/2就是对应该频率下的信号的幅度(对于直流信号是除以N);该点的相位即是对应该频率下的信号的相位。相位的计算可用函数atan2(b,a)计算。atan2(b,a)是求坐标为(a,b)点的角度值,范围从-pi到pi。要精确到xHz,则需要采样长度为1/x秒的信号,并做FFT。要提高频率分辨率,就需要增加采样点数,这在一些实际的应用中是不现实的,需要在较短的时间内完成分析。解决这个问题的方法有频率细分法,比较简单的方法是采样比较短时间的信号,然后在后面补充一定数量的0,使其长度达到需要的点数,再做FFT,这在一定程度上能够提高频率分辨力。