在《大家的人工智能——学习路线总览》中,相信大家已经对人工智能领域已经有了一个初步的了解,现在我们从其中一个小方面入门机器学习,今天我们将要讲述的是机器学习中的一种线性模型——线性回归。
什么是线性回归
让我们把思绪先倒回到初中数学课堂上(如果你已经上过初中),来回顾一个知识点:一元一次方程,给出如下坐标点(1,1.5),(2,2),(3,2.5),要求计算出当x=4时,y的值。
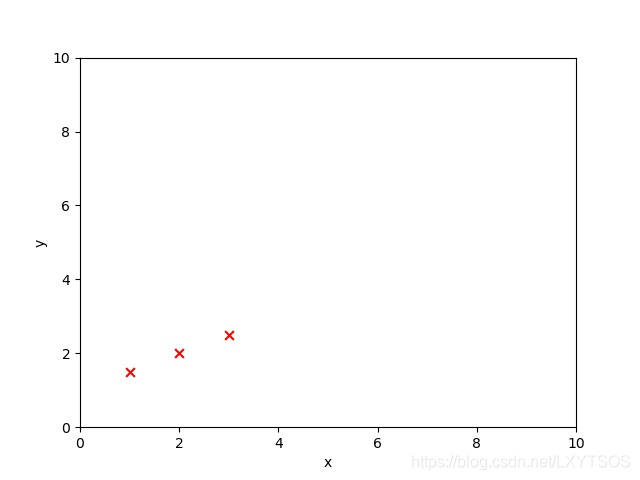
相信大家都会首先求出一条经过这三个点的直线y=1/2x+1,再将x=4代入求得y=3。使用给出的三个点坐标(训练数据),求出一条直线方程(模型),然后计算一个新的x对应的y值(回归,或预测)。大家早在上中学的时候就开始使用线性模型进行回归啦。
那么计算机如何使用这些数据(比如上面的三个点)得到一个拟合(可以理解成很好的将数据点连起来)这些数据的模型(比如上面的直线)呢?计算机可是不知道要首先假设曲线方程为y=ax+b喔,而且也不知道将两个点坐标代入假设出的直线方程然后联立求解出a和b喔。大家好不好奇计算机如何来得到拟合效果好的曲线呢。
假设
我们以一元线性回归(一个自变量)为例,我们假设最终需要找到一条直线:
我们把之前的a替换成w,w在这里表示这个特征(x)所占的权重,即重要程度。那么现在只要我们找到w和b能够使这条直线很好的拟合给出的数据就大功告成啦。
如何寻找w和b
如果要求一条直线的方程,我们人首先会选取两个比较好的点代入方程中,联立求出w和b来,但是让计算机来解方程那就有一定难度啦,那么计算机是如何找出w和b的呢?
- 像前面所说,首先会给我们一堆已知x和y的点(x1,y1),(x2,y2),···,(xn,yn)。
- 然后随机初始化w和b的值,也就是随机初始化出一条直线。
- 选取一个点,将x代入这条直线中求出y’,然后计算出y’和真正的y相差多少。
- 通过算法调整w和b来减少y’和y之间的差值。
- 重复3-4这个步骤,就能慢慢逼近最佳的w和b啦。
代价函数
说到差值,大家最先想到的是讲两个数相减,越小就说明差别越小。但是如果计算许多y’和y差值的总和的话,每对y’和y的差值有正有负,加在一起会抵消掉一部分使得差值总和降低,因此不简单的使用两个值的差,而是在每个差值上平方一下,让它们都为正数,再把所有差值都加起来算平均,得到最终的差值,这就叫做均方误差(mean-square error, MSE),而计算误差的函数我们成为代价函数(Cost Function),或者损失函数(Loss Function)。现在我们已经知道如何来定义这些差值了,下面用数学公式来表示。
首先我们把直线方程改写一下便于区分:
那么根据上面的均方误差计算方式,可以将代价函数写成下面的形式:
其中i表示第几个样本点,m表示样本个数,求和前面分母中的2是为了求导之后形式更美观而加上的。
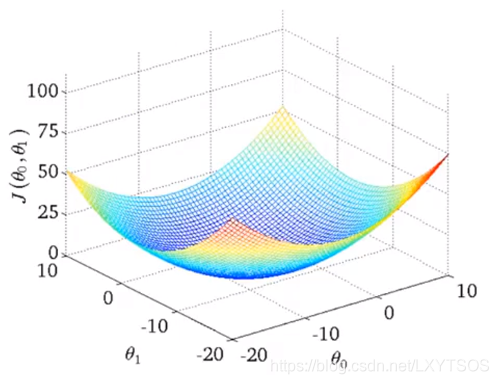
现在我们已经得到一个代价函数啦,我们再来看看上一节说到的,通过减少差值来调整w和b,因此,这里的目标就是如何最小化这个代价函数(最小二乘),而找到使得它最小的θ0和θ1就能得到我们最终想要的那条直线。
现在先回到高中课堂,当我们碰到要求一个函数的极值时,就对它求导,导数为0的地方就是极值。如何让计算机来找到这个最低点呢,我们来观察一下上面的代价函数,它是一个凸函数(想象成一个碗)。
或者用等高线图来表示:
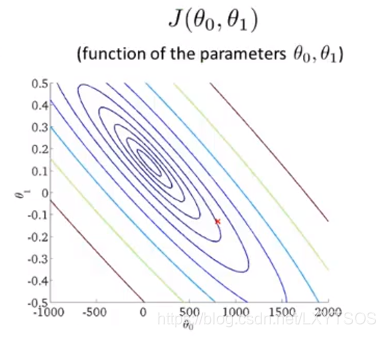
同一个圈上的损失值是一样的,越往里损失值越小。
记得我们在最开始随机挑选了θ0和θ1(w和b)的值吗?也就是在代价函数这个碗上的一个点,我们如何让这个点像下楼梯一样一点一点地往最低处走呢?
梯度下降
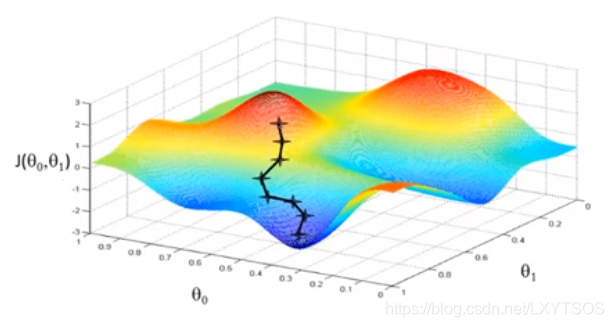
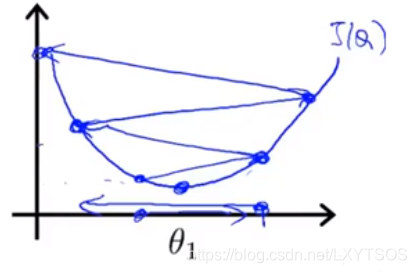
首先我们来看一张环境比较复杂代价函数图:
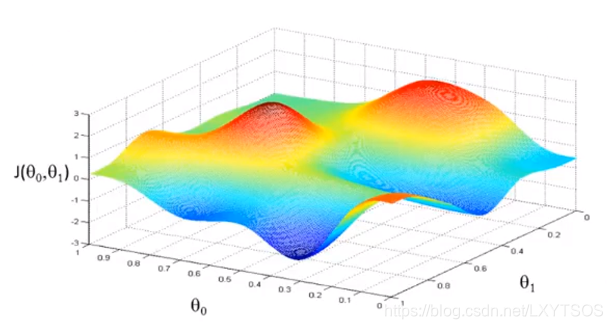
随机在这个图上选一个点,然后一步一步往当前觉得最低的地方走:
如果挑了另外一个点呢,那路线可能完全不同了,会走到其他低处去,比如起始点在之前的基础上往右一点:
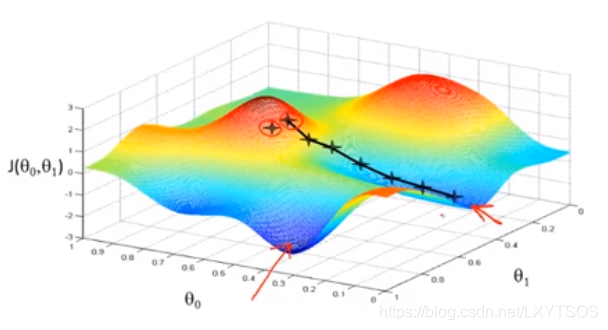
可以很明显看到,由于起始位置的不同,可能最后找到两个不同的局部最优解(局部最小值)。
那么是什么机制可以让这个点一步一步往最低处走呢,它可不会像球一样依靠万有引力往低处滚的喔。下面介绍梯度下降算法,就是这种算法能使这个点一步一步往低处走,这里先给出梯度下降算法更新θ(往下走)的形式,稍后再以图的形式展示:
分别计算j=0与j=1时的值,其中α表示学习率,可以想象成一步跨多大的步伐,之后的部分就是对代价函数求偏导计算梯度了。
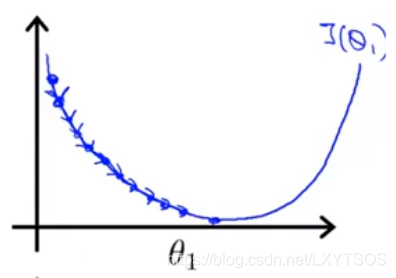
看到数学公式是不是觉得头晕?不用怕,下面用图像形式来展示梯度下降是如何工作的,为了方便展示,下面考虑单变量情形(只有一个θ),那么前面看到的碗状的曲面这个时候就是一个抛物线。
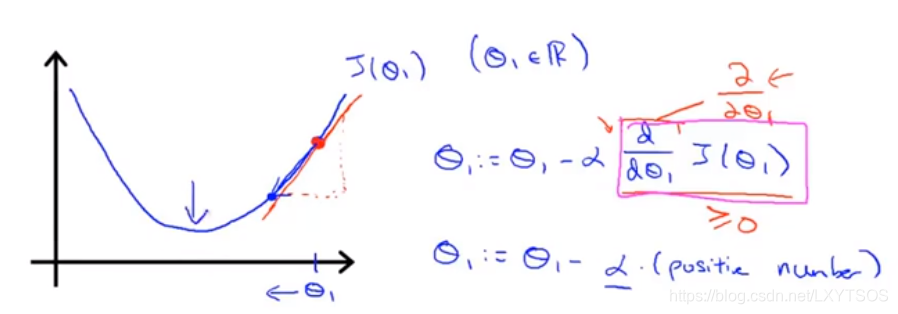
假如初始点落在了右边(红色那个点点),现在求代价函数在这个点处的梯度(导数),也就是那条红色切线的斜率,很明显是个正数,然后学习率乘以梯度得到需要下降多少,因此θ的值会慢慢往左边走。
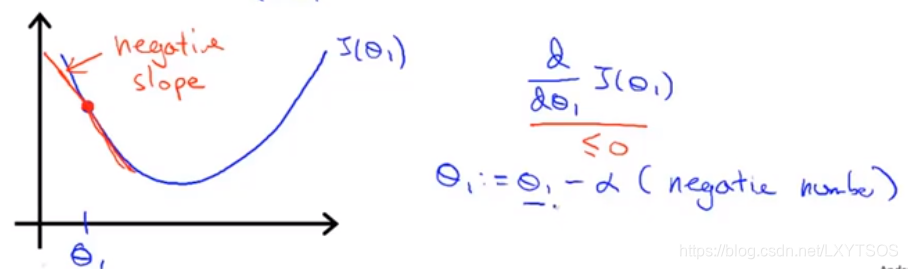
假如初始点落在了左边,那么这个点处的梯度是个负数,θ减去这个值实际上是在增大θ,因此θ会慢慢往右走落向最低处。
如果学习率α太小,就像一个人步子迈的小,就要走很多步才能到最低点:
如果学习率α太大,可能会跨过最低点,甚至有时候会发散根本找不到最低点:
如果保持一个相对小的学习率不变,梯度下降也能收敛到局部最小,如下图:
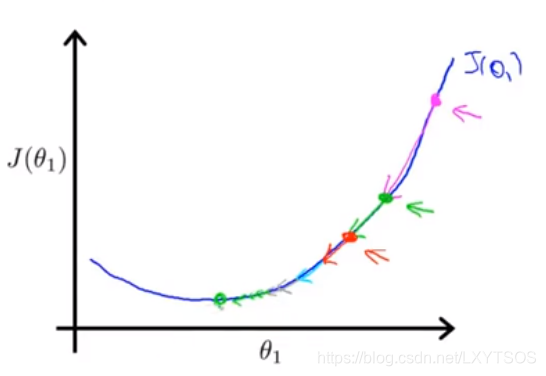
我们可以看到,从最右边的点开始,每进行一次下降,所处位置的梯度值就更小,所以θ每次减的值越来越小,步伐也就越来越小,慢慢能够收敛到全局最小。
基于梯度下降衍生出了很多不同的算法,为了加快下降速度以及找到向较好的方向下降,这里就不详细讲解了。
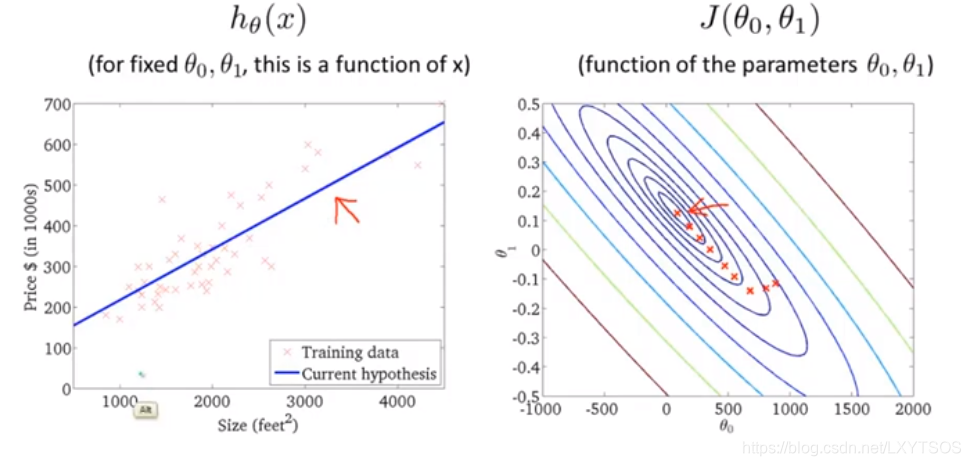
当找到最小化代价函数的θ的时候,也就找到了一条能最好拟合数据的直线:
实践一下
讲了那么多理论的东西,大家是不是觉得有点困倦了,现在我们用sklearn框架来实践一下,使用sklearn中自带的数据集,选其中一维来演示。
我们把训练数据显示在图上:

现在我们要使用这些点拟合出一条直线出来,然后在测试数据上看看效果,在sklearn中只要调用linear_model中的LinearRegression就能够很便捷地训练出一条直线出来:
from sklearn import datasets, linear_model
regr = linear_model.LinearRegression()
regr.fit(diabetes_X_train, diabetes_y_train)
训练出一条直线之后,我们在测试数据上看看效果:
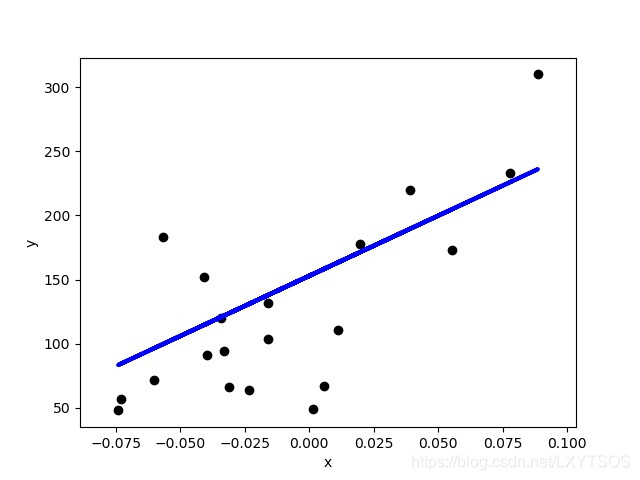
我们把计算出来的系数(即直线的斜率),均方误差等评估指标打印出来:
Coefficients:
[938.23786125]
Mean squared error: 2548.07
Variance score: 0.47
现在大家已经知道线性回归是怎么一回事了,同时也知道如何使用sklearn中提供的算法自己进行尝试了,大家如果碰到类似预测的问题,就可以自己用数据训练模型进行预测啦。
小贴士
为追踪“谷神星”位置,高斯发明了一种方法,根据皮亚齐的观测数据计算出了谷神星的轨道,德国天文学家奥博斯在高斯的预言时间和方位找到了谷神星。1809年,高斯在他的著作《天体运动论》中发表了这种计算方法,这就是最小二乘法。
扫码关注微信公众号:机器工匠,回复关键字“线性回归”获取实现代码。
