VINS是视觉惯性结合的SLAM系统的典范,该系统也是中国人开发的,接下来很长一段时间小狼会带着你一步一步踏踏实实得走进VINS,走进VIO领域!
总的来说,VINS因为涉及IMU与视觉融合,预积分等理论,它的学习坡度要比ORBSLAM陡峭的多!希望看官不要灰心也不要急躁,毕竟人与人的知识水平/经验/资源什么的还是差别很大的……
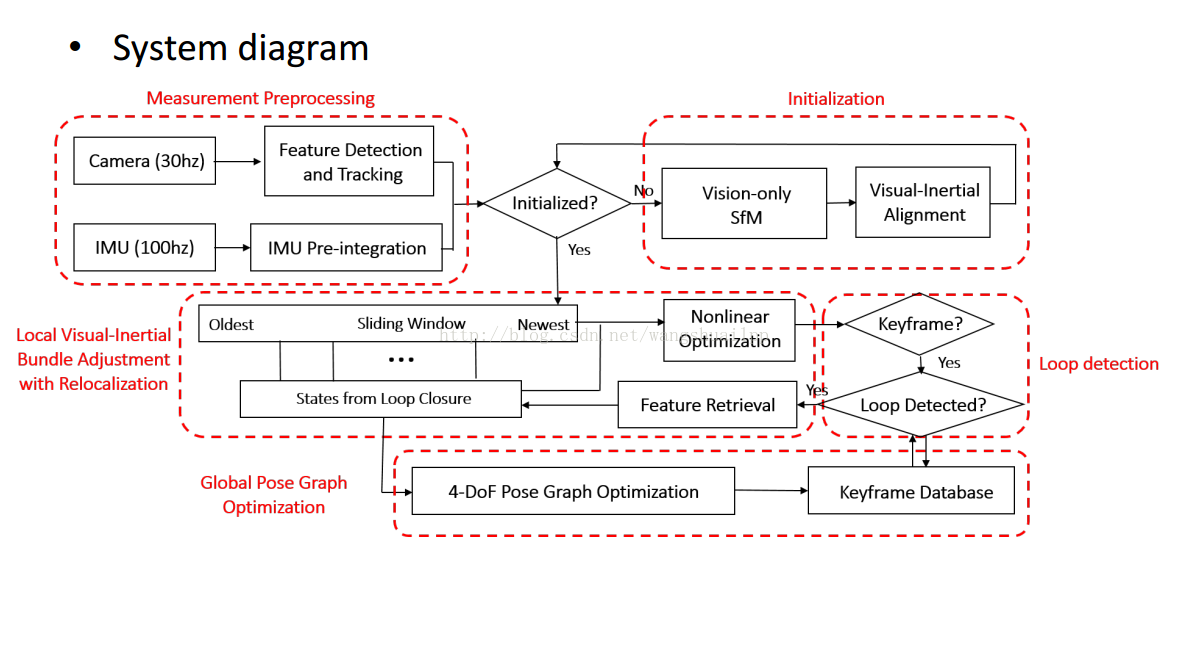
- 数据预处理
- 初始化
- 局部非线性联合优化
- 闭环检测
- 全局位姿图优化
VINS是视觉惯性结合的SLAM系统的典范,该系统也是中国人开发的,接下来很长一段时间小狼会带着你一步一步踏踏实实得走进VINS,走进VIO领域!
总的来说,VINS因为涉及IMU与视觉融合,预积分等理论,它的学习坡度要比ORBSLAM陡峭的多!希望看官不要灰心也不要急躁,毕竟人与人的知识水平/经验/资源什么的还是差别很大的……