简单阈值
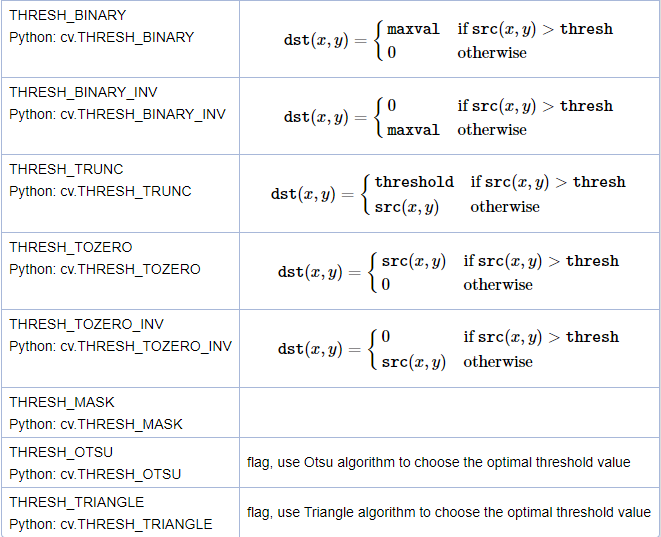
对每一个像素都应用相同的阈值。如果像素值小于阈值,则将其设置为0,否则设置为最大值。cv.threshold函数用于设置阈值,它的第一个参数是源图像的灰度图像,第二个参数是用于对像素值进行分类的阈值,第三个参数是分配给超过阈值的像素值的最大值。OpenCV提供了不同类型的阈值,阈值类型由函数的第四个参数给出。
函数:
retval, dst=cv.threshold(src, thresh, maxval, type[, dst])对每个像素使用固定的阈值
参数:
| src | 输入图像 ,灰度图(多通道, 8-bit or 32-bit floating point). |
| dst | 与src具有相同大小、类型和通道数的输出数组。 |
| thresh | 阈值 |
| maxval | 当像素值超过了阈值(或者小于阈值,根据type来决定),所赋予的值 |
| type | 阈值类型 (see ThresholdTypes). |
返回值:
retVal:使用的阈值,在Otsu‘s中会用到
dst: 经过阈值处理的图像
阈值类型:
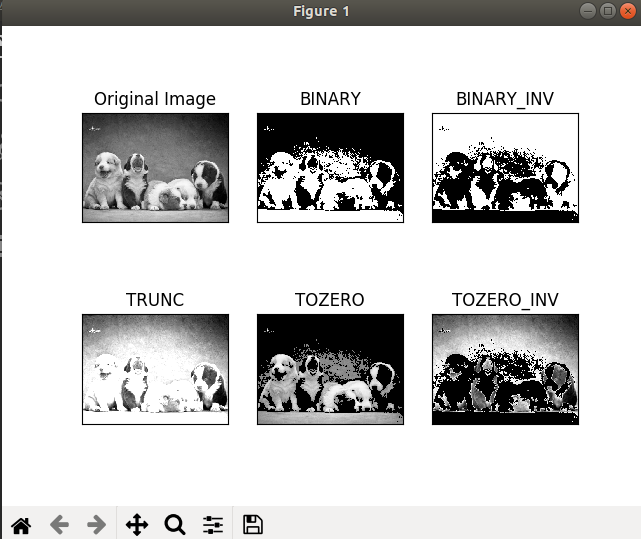
举例:
import cv2 as cv import numpy as np from matplotlib import pyplot as plt img = cv.imread('4.jpg', 0) ret, thresh1 = cv.threshold(img, 127, 255, cv.THRESH_BINARY) ret, thresh2 = cv.threshold(img, 127, 255, cv.THRESH_BINARY_INV) ret, thresh3 = cv.threshold(img, 127, 255, cv.THRESH_TRUNC) ret, thresh4 = cv.threshold(img, 127, 255, cv.THRESH_TOZERO) ret, thresh5 = cv.threshold(img, 127, 255, cv.THRESH_TOZERO_INV) titles = ['Original Image', 'BINARY', 'BINARY_INV', 'TRUNC', 'TOZERO', 'TOZERO_INV'] images = [img, thresh1, thresh2, thresh3, thresh4, thresh5] for i in range(6): plt.subplot(2, 3, i+1), plt.imshow(images[i], 'gray') plt.title(titles[i]) plt.xticks([]), plt.yticks([]) plt.show()
自适应阈值
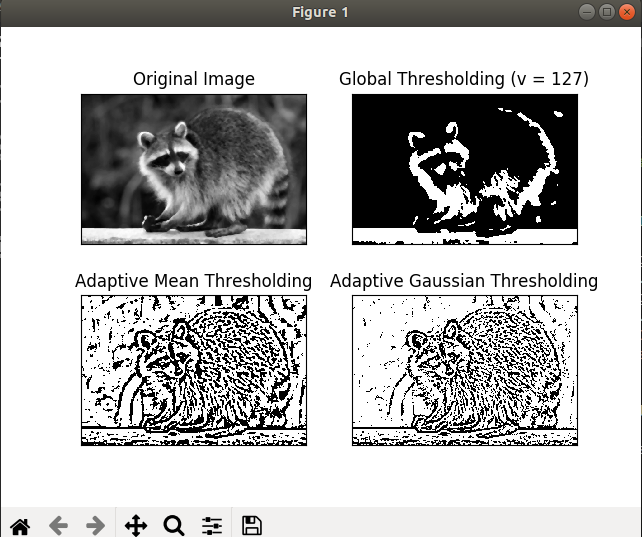
在上一节中,我们使用一个全局值作为阈值。但这并不适用于所有情况,例如,如果一张图像在不同的区域有不同的光照条件。在这种情况下,自适应阈值阈值可以提供帮助,算法会根据像素周围的小区域来确定像素的阈值。因此,对于同一幅图像的不同区域,我们得到了不同的阈值,对于光照不同的图像,我们得到了更好的结果。除了上述所描述的区域外,cv.adaptiveThreshold函数还需要3个其它参数。
函数
dst=cv.adaptiveThreshold(src, maxValue, adaptiveMethod, thresholdType, blockSize, C[, dst])
参数:
| src | 源 8-bit 单通道图像 |
| dst | 与源图像具有相同大小和类型的目标图像 |
| maxValue | 当像素值超过了阈值(或者小于阈值,根据type来决定),所赋予的值 |
| adaptiveMethod | 阈值的计算方法,包含以下2种类型: see AdaptiveThresholdTypes. |
| thresholdType | 阈值类型必须是 THRESH_BINARY or THRESH_BINARY_INV |
| blockSize | 像素邻域的大小,用来计算像素的阈值: 3, 5, 7, and so on. |
| C | 阈值计算方法中的常数项 |
上述参数中,adaptiveMethod决定了阈值是如何计算的
cv.ADAPTIVE_THRESH_MEAN_C: 阈值是邻域面积减去常数C的平均值。
cv2.ADAPTIVE_THRESH_GAUSSIAN_C:阈值是邻域值减去常数C的高斯加权和,权重为一个高斯窗口
blockSize大小决定了邻域的大小,C是从邻域像素的均值或加权和中减去的常数。
举例
import cv2 as cv import numpy as np from matplotlib import pyplot as plt img = cv.imread('2.png',0) # 中值滤波,抑制图像噪声。在滤除噪声的同时,能够保护信号的边缘,使之不被模糊 img = cv.medianBlur(img,5) # 简单阈值 ret,th1 = cv.threshold(img,127,255,cv.THRESH_BINARY) # 自适应阈值 th2 = cv.adaptiveThreshold(img,255,cv.ADAPTIVE_THRESH_MEAN_C,\ cv.THRESH_BINARY,11,2) th3 = cv.adaptiveThreshold(img,255,cv.ADAPTIVE_THRESH_GAUSSIAN_C,\ cv.THRESH_BINARY,11,2) titles = ['Original Image', 'Global Thresholding (v = 127)', 'Adaptive Mean Thresholding', 'Adaptive Gaussian Thresholding'] images = [img, th1, th2, th3] for i in range(4): plt.subplot(2,2,i+1),plt.imshow(images[i],'gray') plt.title(titles[i]) plt.xticks([]),plt.yticks([]) plt.show()
Otsu's二值化
在全局阈值化中,我们使用一个任意选择的值作为阈值。相反,Otsu的方法避免了必须选择一个值并自动确定它。
Otsu’s Binarization是一种基于直方图的二值化方法,它需要和threshold函数配合使用。
考虑只有两个不同图像值的图像(双峰图像),其中直方图只包含两个峰值。一个好的阈值应该位于这两个值的中间(对于非双峰图像,这种方法 得到的结果可能会不理想)。同样,Otsu的方法从图像直方图中确定一个最优的全局阈值。
为此,使用 cv.threshold()函数, cv.THRESH_OTSU 最为一个额外的标志传入。阈值可以任意选择。然后,该算法找找出一个最优阈值最为第一个输出。
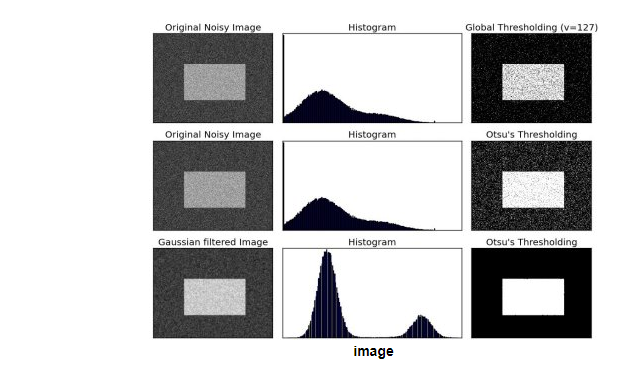
看一下下边的例子。输入图像是一个有噪声的图像,在第一种情况下,应用值为127的全局阈值。在第二种情况下,直接应用Otsu的阈值。在第三种情况下,首先用5x5高斯核对图像进行滤波,去除噪声,然后应用Otsu阈值。看看噪声滤波如何改进结果。
import cv2 as cv import numpy as np from matplotlib import pyplot as plt img = cv.imread('noisy2.png',0) # global thresholding ret1,th1 = cv.threshold(img,127,255,cv.THRESH_BINARY) # Otsu's thresholding ret2,th2 = cv.threshold(img,0,255,cv.THRESH_BINARY+cv.THRESH_OTSU) # Otsu's thresholding after Gaussian filtering blur = cv.GaussianBlur(img,(5,5),0)
# 阈值一定要设为0 ret3,th3 = cv.threshold(blur,0,255,cv.THRESH_BINARY+cv.THRESH_OTSU) # plot all the images and their histograms images = [img, 0, th1, img, 0, th2, blur, 0, th3] titles = ['Original Noisy Image','Histogram','Global Thresholding (v=127)', 'Original Noisy Image','Histogram',"Otsu's Thresholding", 'Gaussian filtered Image','Histogram',"Otsu's Thresholding"] for i in xrange(3): plt.subplot(3,3,i*3+1),plt.imshow(images[i*3],'gray') plt.title(titles[i*3]), plt.xticks([]), plt.yticks([]) plt.subplot(3,3,i*3+2),plt.hist(images[i*3].ravel(),256) plt.title(titles[i*3+1]), plt.xticks([]), plt.yticks([]) plt.subplot(3,3,i*3+3),plt.imshow(images[i*3+2],'gray') plt.title(titles[i*3+2]), plt.xticks([]), plt.yticks([]) plt.show()
Otsu过程:
1. 计算图像直方图;
2. 设定一阈值,把直方图强度大于阈值的像素分成一组,把小于阈值的像素分成另外一组;
3. 分别计算两组内的偏移数,并把偏移数相加;
4. 把0~255依照顺序多为阈值,重复1-3的步骤,直到得到最小偏移数,其所对应的值即为结果阈值。