我们的冒险之旅始于设计并开发一种自主运行的汽车底盘,从而为各种行业降低应用自动驾驶技术门槛。这个旅程中,为了测试自动驾驶系统,我们碰到了第一个技术难题——线控。
汽车是一种机电产品,让汽车自主运行的前提是让汽车转向、制动等执行机构具备信号控制的能力,相当于打通汽车的任督二脉。这样车辆可以接收来自车载电脑(上位机)的指令。但是,当我们着手信号控制的时候,发现汽车产业非常封闭,无论是汽车主机厂、还是零部件供应商,都不会为自动驾驶开发者提供车辆的线控(信号控制)接口,同时我们也与专业线控改装公司Autonomoustuff接触改装事宜,但是十万美金起跳的改装费让当时的我们无力承受。
作为兵来将挡、水来土掩的PIX无敌创业团队,没有什么能够阻挡我们通向愿景的道路,于是我们开始自己动手,进行车辆Hack。今天我们不仅为自己改装过5辆不同型号的车辆,也为其他自动驾驶公司、高校提供过线控改装服务。于是我们想把PIX在线控工程中的故事,以及一些思路和方法,通过技术博客连载的形式分享出来,希望能启发更多想要自己动手改装车辆的工程师或研究者。
PIX团队改过很多很多的车,从简单的到复杂,从燃油动力到混合动力、到纯电动,例如很受欢迎的MKZ、CRV、蒙迪欧等等,但我们最开始的实验车,是一辆非常非常简单甚至可以说是简陋的电动车底盘,就像下面这一辆。(小编:这是什么鬼,说好的高大上呢?)

( 图片涞源www.taobao.com)
没错,就是类似这样的一辆电动底盘让我们开启了车辆线控工程的旅程。别看这个车有点简陋,但是一辆车该具备的机械功能它都是有的:转向系统、悬挂、加速和制动系统。但是这辆车达到自动驾驶要求的线控车辆平台还是有一定距离的,首先这辆车的转向是纯机械的,需要增加伺服系统,虽然效果不是很理想,但是这辆车成为我们早期最佳的工程实验平台。
说到线控执行机构,有必要先来熟悉一下汽车控制有关的部件,以下所有内容都是与线控工程相关的车辆部件,其他不相关的的汽车部件稍稍掠过。一辆车要能够跑起来,最基本的能力包括横向控制和纵向控制,横向控制指的是车能够在X方向移动,纵向控制指的是能够在Y方向的移动。
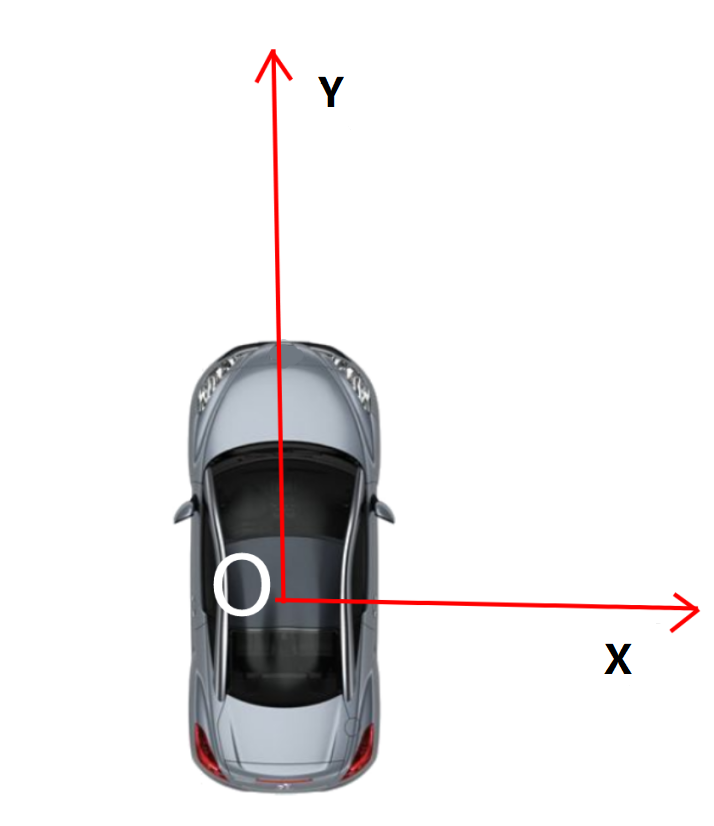
转向系统是给车辆提供横向移动的机构,纵向控制则由发动机/电动机加速系统和制动系统两个同时来完成,前进后退切换则由挡位切换机构完成。当然为了实现线控,同样也需要这几个系统,同时还需要他们都具备能够通过电信号来控制的能力。

线控技术是在传统车辆基础之上来增加的,其实线控技术并不是才兴起的新技术,线控(x-by-wire)最早应用在航空领域,源于飞行控制系统。它将飞行员执行的操作动作转变成弱电信号,再通过弱电信号控制强电执行机构的方式来实现相应的飞行控制。整个控制过程中增加了计算机控制环节。线控系统的主要作用是减少复杂的机械传动机构,使整体质量更轻,降低油耗,降低制造成本,控制更简洁同时便于增加计算机辅助控制。
随着汽车领域不断发展,相应需求不断提高后引入了线控技术,该技术在车辆中主要解决了车辆空间利用率的问题和为现在正在飞速发展的自动驾驶提供了坚实的底层控制基础。线控技术包括很多部分,如线控转向,线控制动,线控油门和线控悬架等都属于线控技术范畴。上面所述的几个部分在线控领域中有自己的名字,但是不同车厂或者集团对每个系统的叫法又有所不同。
横向控制结构组成
在现代汽车转向构造中,大部分的汽车都已经完成了从传统机械传到以机械传动为执行机构上加上转向助力系统的转变,当驾驶员在进行转向动作时,车辆会捕捉驾驶员的转向动作并持续输出一个辅助转向力让转向变得更加轻便。转向力输出主要依靠助力系统来完成,其中包括:液压助力系统,电控液压助力系统和电子助力系统。
针对汽车线控工程,由于液压助力和电控液压助力在乘用车中逐渐被电子助力系统取代,现有绝大部分具备辅助驾驶的汽车基本上都使用了电子助力系统,同时线控的改装同样基于此种线控转向来实现。
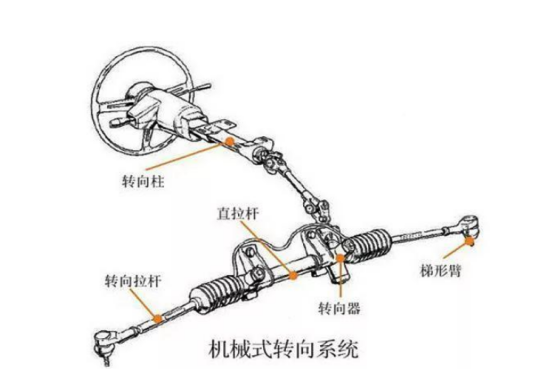
(http://m.sohu.com/a/223468808_100102773/?pvid=000115_3w_a)
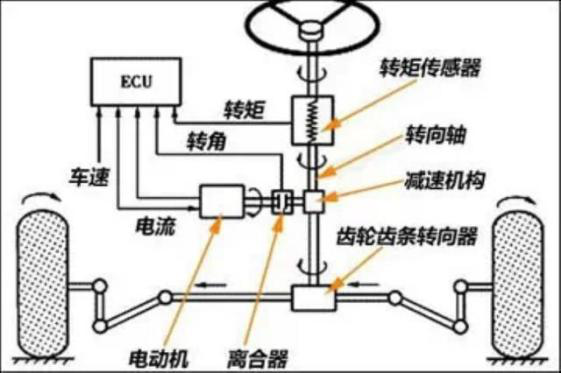
(http://k.sina.com.cn/article_3913291662_e940178e00100icr8.html?from=auto)
横向控制系统主要包括机械转向部分和电子控制部分,机械转向部分主要作用是通过机械传动将方向盘转动量变成车轮的转角量,其中包括了,转向杆,万向轴,转向机和拉杆。通过转向机中齿轮和齿条的传动将转动变成平动,从而推动车轮实现转向。电子部分主要作用是将人类纯机械的动能输入转换成通过电机转动来实现转向机的动能输入,主要包括转向电机,转向传感器和转向控制器。后面我们将详细的讲解转向系统的组成。
纵向控制架构组成
纵向控制是指汽车的前进、后退、加速和减速,如前所述,纵向控制分为了三个核心控制:加速控制,减速控制和挡位调换。
(1)加速控制:汽车加速需要通过发送机或者电动机产生的动力来完成,发送机或者电动机上分配了一个电子控制单元,该控制器主要用于管理发动机/电动机的输入和输出,而输入传感器安装在汽车油门踏板处,在检测到驾驶员踩下油门时,会将油门量转换成电子控制信号来控制发送机转速。
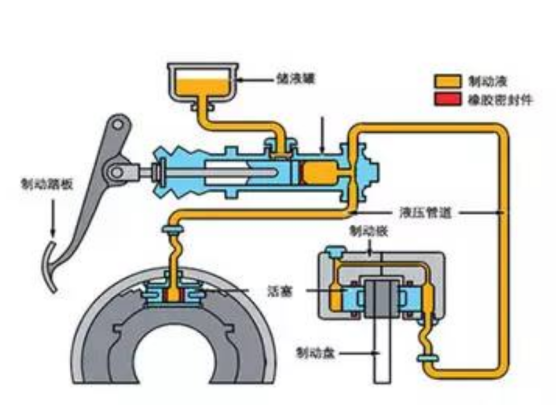
(2)减速控制:制动的控制依赖于车身上的液压制动系统,液压制动系统的组成部分包括:油壶,总泵,刹车踏板,油路,液压油和刹车卡钳。当驾驶员踩下刹车踏板之后会使总泵中的油压上升,最后压力驱动安装在四个轮子上的制动卡钳实现制动。当然这种压力控制为被动控制,油压的增加和减少需要人为干预,现代汽车为了考虑汽车安全性逐渐增加了ABS防抱死系统,该系统拥有一个独立的制动控制源,该源可以调节制动压力,控制汽车制动压力保持在一个合理的范围。随着舒适性,自动化和智能化的不断提高,很多车型都加装了电子制动单元,同样也可以实现主动式的压力调节。
(3)挡位控制:汽车前进和后退是通过挡位控制来切换的,这里主要针对自动档汽车,为什么呢,因为手动挡汽车基本上都是燃油车发动机通过机械变速箱来实现挡位切换的,所以如果是手动挡汽车则不具备电控挡位的能力,现在大部分汽车都是机械式的挡位切换控制,所以倒退自如在这种车型中是很难实现的。

(http://www.sohu.com/a/336808877_754529)
(https://m.baidu.com/tc?from=bd_graph_mm_tc&srd=1&dict=20&src=http%3A%2F%2Fwww.jqw.com%2Fbaoxian%2Fdetail-5436960.html&sec=1567769283&di=b8881e8b8f54e4cb)
通过上面的大致介绍,我们基本上理清了汽车几个和运动控制相关的执行机构,他们的工作在现代车辆中其实是相对比较复杂的,因为每一个系统并不是独立在工作,而是互相之间必须要有依存关系,这也是我们在线控工程中发现的一个个坑,例如单独把转向系统剥离出整车,它是不会工作的,必须接入到整车环境中,这里引出了一个整车环境试验台,它能够提供各种这个转向柱需要的输入信息,这其实也是车辆Hack的一个难点。
本章内容大致介绍了一辆汽车的核心机构,同时还讲了他们各自是如何工作的,当然接下来我会带领大家一个一个的去了解它们更深层次的组成方式和工作模式,同时也会分享PIX团队在这条线控工程中遇到的一些问题和解决思路。
在了解了车辆组成之后,PIX团队碰到了另外一个问题,就是这些模块之间是怎么联系在一起的呢,同时他们通过何种方式进行协调和沟通,这也引出了下一个我们即将介绍的部分——车辆通讯协议。下一章将着重讲解这一部分的相关知识和我们探索中遇到的各种困难,分享PIX团队在整个过程中获得的丰硕实践经验。我是PIX团队的一员——dowson(曾工阿虫),请持续关注pixmoving.com和我的个人博客网站dowson.live,我将会分享更多的关于自动驾驶方面的干货o(* ̄▽ ̄*)ブ。
我们是PIX MOVING。通往可持续发展城市的道路上,我们为物流、零售、旅游、地产等行业提供L4自动驾驶通用底盘,降低用户应用自动驾驶的门槛,基于底盘可定制自动驾驶清扫车、零售车,物流车及移动空间。为交付高性价比产品,我们采用基于人工智能的生成设计与金属3D打印技术。