前言
本文为个人学习译文,可以在这里获取本文完整源码。
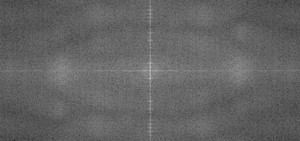
印象
说明
1. 扩展图像至最优尺寸
傅里叶变换需要依赖图像尺寸,而当图像尺寸为2、3、5的倍数时,傅里叶变换的性能最佳。我们使用 getOptimalDFTSize() 获取图像尺寸的最优值,使用 copyMakeBorder() 拓展图像边界至最优值。
Mat padded;
int m = getOptimalDFTSize( I.rows );
int n = getOptimalDFTSize( I.cols );
// 使用 0 填充图像的右边界和下边界
copyMakeBorder(I, padded, 0, m - I.rows, 0, n - I.cols, BORDER_CONSTANT, Scalar::all(0));2. 创建用于存储傅里叶变换结果的内存
傅里叶变换的结果为复数,所以创建2幅图像,分别用于存储 DFT 结果的实部和虚部。另外,频域范围比之空域大很多,所以需要使用32位浮点数。
Mat planes[] = {Mat_<float>(padded), Mat::zeros(padded.size(), CV_32F)};
Mat complexI;
merge(planes, 2, complexI);3. 执行傅里叶变换
dft(complexI, complexI); 4. 将傅里叶变换的复数结果转换为振幅
DFT 的振幅为:
\[ M = \sqrt{Re(DFT(I))^2 + Im(DFT(I))^2} \]
其中:\(Re\) 是复数的实部, \(Im\) 是复数的虚部
split(complexI, planes); // planes[0] = Re(DFT(I), planes[1] = Im(DFT(I))
magnitude(planes[0], planes[1], planes[0]);// planes[0] = magnitude
Mat magI = planes[0];5. 将振幅转换为对数值
傅里叶系数的动态范围太大了,不利于显示在屏幕上,所以转换为对数。
\[ M_1 = log(1 + M) \]
magI += Scalar::all(1);
log(magI, magI);6. 剪切和中心化
在第一步我们拓展了图像的尺寸,所以需要裁剪掉。另外,为了达到更好的可视化效果,将原点移动到图像的中心。
magI = magI(Rect(0, 0, magI.cols & -2, magI.rows & -2));
int cx = magI.cols/2;
int cy = magI.rows/2;
Mat q0(magI, Rect(0, 0, cx, cy)); // Top-Left - Create a ROI per quadrant
Mat q1(magI, Rect(cx, 0, cx, cy)); // Top-Right
Mat q2(magI, Rect(0, cy, cx, cy)); // Bottom-Left
Mat q3(magI, Rect(cx, cy, cx, cy)); // Bottom-Right
Mat tmp; // swap quadrants (Top-Left with Bottom-Right)
q0.copyTo(tmp);
q3.copyTo(q0);
tmp.copyTo(q3);
q1.copyTo(tmp); // swap quadrant (Top-Right with Bottom-Left)
q2.copyTo(q1);
tmp.copyTo(q2);7. 归一化
这个步骤的目的也是为了更好的可视化,因为我们此时得到的振幅依然超出了图像的显示范围(0-1),所以我们使用 normalize() 将我们的振幅归一化到该范围。
normalize(magI, magI, 0, 1, CV_MINMAX);