基于stm32f103单片机对信号频率、占空比的测量。
最近开始仪器仪表方面的学习了,计划后期做一个示波器。所以这周就在stm32f103上面做了一个测量频率、占空比的小设计。总体上精度还是比较高的,测量频率量程在35Hz—190KHz。频率可以精确到小数点后四位,占空比测量的精度也比较高,可以到小数点后两位。
说到用stm32测频率,都会想到用定时器的输入捕获模式,只需要一个定时器和一个IO口即可,前几天在论坛上看到还有一种是用两个定时器测频率,一个定时器用来检测信号跳变沿,另外一个用来精准定时,比如说用TIM1检测跳变沿(假设为上升沿),TIM2开一个1s的定时器中断,这个1s就比较准确,在1s内TM1检测到了多少个上升沿改信号的频率就是多少。这种方法我本周二试过,精度比输入捕获模式下的高,而且还比较稳定,缺点是用到了两个定时器,占用的cpu资源较多。考虑到我后面任务需要,定时器可能会不够用,故还是用的输入捕获模式。
实验平台:stm32f103zet6
定时器及通道:TIM2的通道2
IO口:PA1
定时器及输入捕获模式的配置:
u8 Edge_Flag; //高低电平的标志位
u16 Rising,Falling,Rising_Last;
//定时器2输入捕获中断初始化
void TIM2_Cap_Init()
{
GPIO_InitTypeDef GPIO_InitStruct;
TIM_TimeBaseInitTypeDef TIM_InitStruct;
TIM_ICInitTypeDef TIM_ICInitStruct;
NVIC_InitTypeDef NVIC_InitStruct;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2,ENABLE);
GPIO_InitStruct.GPIO_Pin=GPIO_Pin_1;
GPIO_InitStruct.GPIO_Mode=GPIO_Mode_IN_FLOATING; //浮空
GPIO_InitStruct.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOA,&GPIO_InitStruct);
TIM_InitStruct.TIM_ClockDivision=TIM_CKD_DIV1;
TIM_InitStruct.TIM_CounterMode=TIM_CounterMode_Up; //向上计数
TIM_InitStruct.TIM_Period=0xffff;
TIM_InitStruct.TIM_Prescaler=0; //分频系数 当分频系数越大时,可测量频率最小值越小
TIM_TimeBaseInit(TIM2,&TIM_InitStruct);
TIM_ICInitStruct.TIM_Channel=TIM_Channel_2;
TIM_ICInitStruct.TIM_ICFilter=0x00; //不滤波
TIM_ICInitStruct.TIM_ICPolarity=TIM_ICPolarity_Rising; //第一次是检测上升沿进入中断
TIM_ICInitStruct.TIM_ICPrescaler=TIM_ICPSC_DIV1;
TIM_ICInitStruct.TIM_ICSelection=TIM_ICSelection_DirectTI; //直接映射
TIM_ICInit(TIM2,&TIM_ICInitStruct);
TIM_ITConfig(TIM2,TIM_IT_CC2,ENABLE);
NVIC_InitStruct.NVIC_IRQChannel=TIM2_IRQn;
NVIC_InitStruct.NVIC_IRQChannelCmd=ENABLE;
NVIC_InitStruct.NVIC_IRQChannelPreemptionPriority=0x00; //抢占优先级
NVIC_InitStruct.NVIC_IRQChannelSubPriority=0x01; //响应优先级
NVIC_Init(&NVIC_InitStruct);
TIM_Cmd(TIM2,ENABLE); //使能
}
定时器2的中断服务函数:
void TIM2_IRQHandler(void)
{
if(TIM_GetITStatus(TIM2,TIM_IT_CC2)!=RESET) //捕获到上升沿
{
if(Edge_Flag==1)
{
Rising=TIM2->CCR2; //第一次检测到下降沿
TIM_OC2PolarityConfig(TIM2,TIM_ICPolarity_Rising); //再次改为上升沿触发
Edge_Flag++;
}
else if(Edge_Flag==2)
{
Rising_Last=TIM2->CCR2;
TIM_OC2PolarityConfig(TIM2,TIM_ICPolarity_Rising);
Edge_Flag=0; //标志位清0
TIM_SetCounter(TIM2,0); //定时器清0
}
else
{
Falling=TIM2->CCR2; //第一次检测到上升沿
TIM_OC2PolarityConfig(TIM2,TIM_ICPolarity_Falling); //将上升沿触发改为下降沿触发
Edge_Flag++;
}
}
TIM_ClearITPendingBit(TIM2,TIM_IT_CC2); //清除标志位
}
输入捕获模式下,中断服务函数里面处理的内容要尽量少,所以在记录定时器捕获到值时,直接将TIM2的CCR2寄存器里面的值赋值给相应变量。
主函数:
int main(void)
{
delay_init(); //延时函数初始化
OLED_Init(); //oled屏幕初始化
OLED_On();
OLED_Clear();
TIM2_Cap_Init(); //定时器初始化
while(1)
{
OLED_ShowString(0,0,"Freq:",16);
OLED_ShowString(100,0,"Hz",16);
OLED_ShowNum(50,0,72000000/(Rising_Last-Falling),6,16);
OLED_ShowString(0,2,"Duty:",16);
OLED_ShowString(95,2,"%",16);
OLED_Showdecimal(50,2,(float)(Rising-Falling)/(float)(Rising_Last-Falling)*100,2,3,16);
delay_ms(100);
}
}
变量Rising_Last为第二次检测到上升沿捕获到的值,Falling为第一次捕获到的值,两者之差为定时器计数的数值差,根据TIM_Prescaler=0(即不分频),主频为72M,频率f=72M/(Rising_Last-Falling)。而Rising-Falling为高电平的时间,除以一个周期就是占空比了。
实验现象
频率10K,占空比60%

频率102.56K,占空比33%
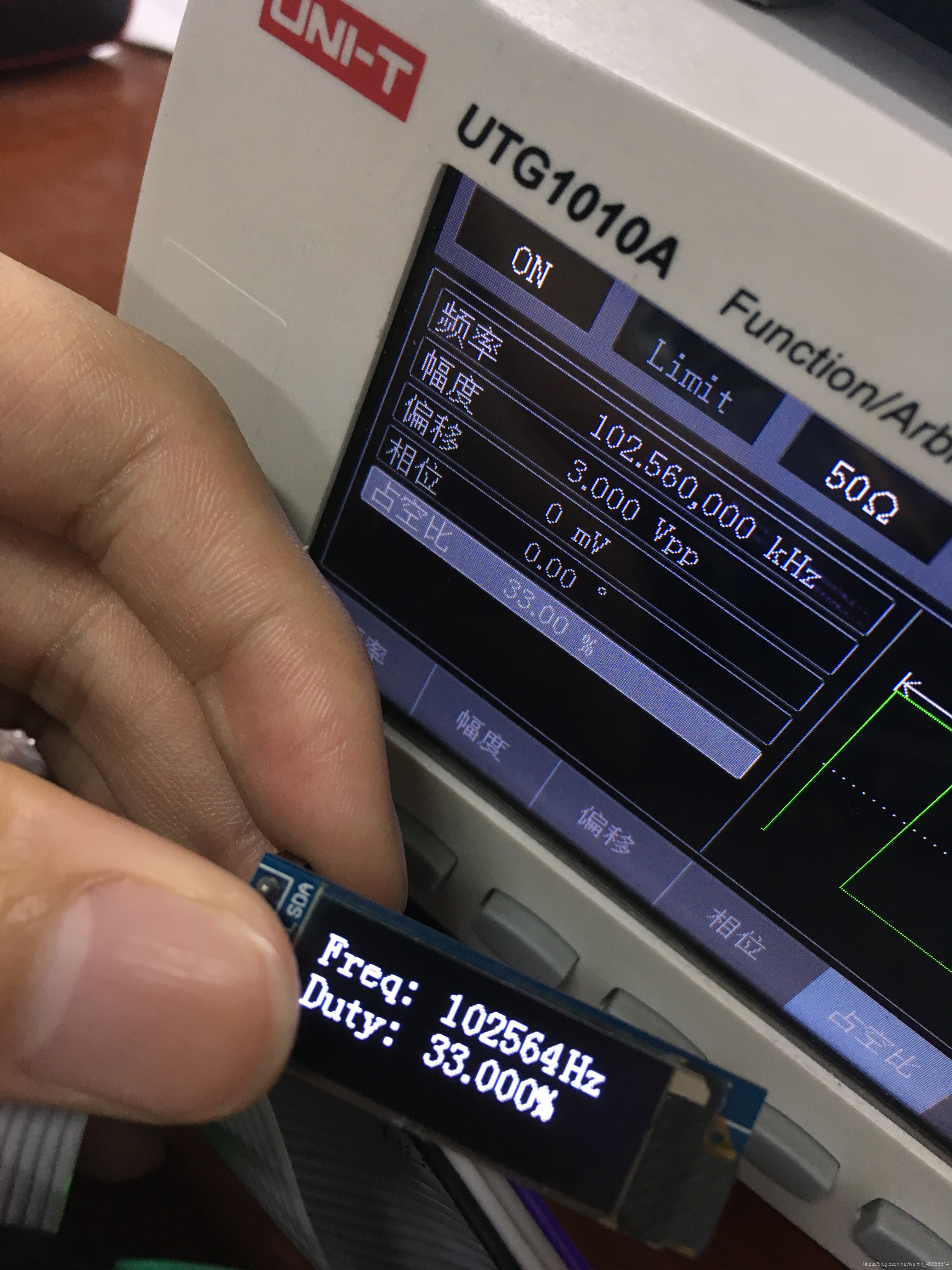
可见效果还是挺不错的,但是这种办法包括上面讲到的双定时器法都有一个缺点,那就是当信号幅度小于2v时,单片机就检测不到跳变沿。外部还需要硬件对信号进行适当放大。也是前几天,在论坛上看到有人提出一个测频率的叫过零检测法,用ADC读信号电压值,ADC值为0时进行记录,再次为0就相当于经过了半个周期。计算两次ADC为0的时间差,就可以计算出信号的频率,这种方法不会受限于信号幅度大小。原理也比较简单,相关程序我也正在写,等测试没问题后我再发出来和大家分享!
