一、RT-Thread简介
RT-Thread,全称是Real Time-Thread,顾名思义,它是一个嵌入式实时多线程操作系统。RT-Thread 主要采用 C 语言编写,浅显易懂,方便移植。它把面向对象的设计方法应用到实时系统设计中, 使得代码风格优雅、架构清晰、系统模块化并且可裁剪性非常好。相较于 Linux 操作系统,RT-Thread 体积小,成本低,功耗低、启动快速,除此以外 RT-Thread 还具有实时性高、占用资源小等特点,非常适用于各种资源受限(如成本、功耗限制等)的场合。 虽然 32 位 MCU 是它的主要运行平台,实际上很多带有 MMU、基于 ARM9、ARM11 甚至 Cortex-A 系列级别 CPU 的应用处理器在特定应用场合也适合使用 RT-Thread。
RT-Thread始于2006年一个GitHub开源项目,最初只是兴趣驱动,经过几年的沉淀,以及大量开发者的贡献维护,使之成为拥有一个国内最大的嵌入式开源社区,同时被广泛应用于能源、车载、医疗、消费电子等多个行业,累积装机量超过2亿台,成为国人自主开发、国内最成熟稳定和装机量最大的开源RTOS。

上图列出了RT-Thread的发展历程,如想了解更多信息,请移步RT-Thread官网。
二、为什么选择RT-Thread
近年来,物联网(Internet Of Things,IoT)概念广为普及,物联网市场发展迅猛, 嵌入式设备的联网已是大势所趋。终端联网使得软件复杂性大幅增加,传统的 RTOS 内核已经越来越难满足市场的需求,在这种情况下,物联网操作系统(IoT OS)的概念应运而生。 物联网操作系统是指以操作系统内核(可以是 RTOS、Linux 等)为基础, 包括如文件系统、图形库等较为完整的中间件组件,具备低功耗、安全、 通信协议支持和云端连接能力的软件平台,RT-Thread 就是一个 IoT OS。这里先看下RT-Thread的架构:
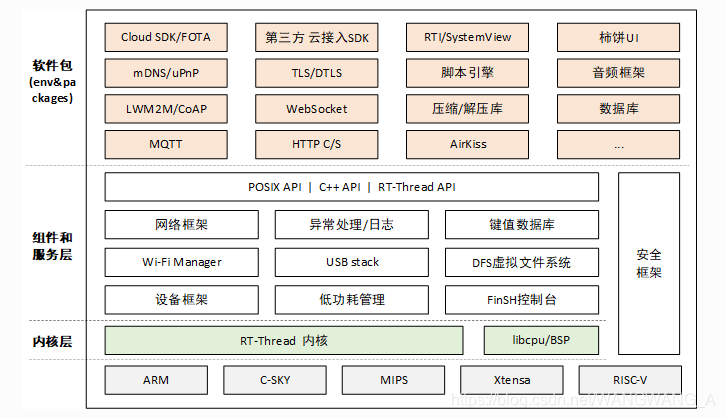
它具体包括以下部分:
内核层:RT-Thread 内核,是 RT-Thread 的核心部分,包括了内核系统中对象的实现, 例如多线程及其调度、信号量、邮箱、消息队列、内存管理、定时器等; libcpu/BSP(芯片移植相关文件 / 板级支持包)与硬件密切相关,由外设驱动和 CPU 移植构成。
组件与服务层:组件是基于 RT-Thread 内核之上的上层软件,例如虚拟文件系统、FinSH 命令行界面、 网络框架、设备框架等。采用模块化设计,做到组件内部高内聚,组件之间低耦合。
RT-Thread 软件包:运行于 RT-Thread 物联网操作系统平台上,面向不同应用领域的通用软件组件, 由描述信息、源代码或库文件组成。RT-Thread 提供了开放的软件包平台, 这里存放了官方提供或开发者提供的软件包,该平台为开发者提供了众多可重用软件包的选择, 这也是 RT-Thread 生态的重要组成部分。软件包生态对于一个操作系统的选择至关重要, 因为这些软件包具有很强的可重用性,模块化程度很高,极大的方便应用开发者在最短时间内, 打造出自己想要的系统。
RT-Thread是一个框架清晰、功能强大的系统,同时迎合了物联网趋势,这是选择RT-Thread的最主要原因。其次,在项目开发中往往因为不会跑系统而力不从心,学习了系统不仅可以提高项目能力,更能提高编程能力。
