2 Inertial Navigation
惯性导航是一种独立的导航技术,由加速度计和陀螺仪提供的测量数据用来跟踪一个物体相对于一个已知的起始点、方向和速度的位置和方向。惯性测量单元(IMUs)通常包含三个正交速率陀螺仪和三个正交加速度计,分别测量角速度和线性加速度。通过处理来自这些设备的信号,可以跟踪设备的位置和方向,如2.1节所述。
惯性导航被广泛应用于飞机、战术和战略导弹、航天器、潜艇和船舶的导航。MEMS器件结构的最新进展使得制造小型和轻型惯性导航系统成为可能。这些进展拓宽了可能的应用范围,包括人类和动物的动作捕捉等领域
2.1 Inertial System Confifigurations
几乎所有的imu都属于下面列出的两类。这两种陀螺仪的区别在于速率陀螺仪和加速度计工作时的参照系不同。在整个报告中,我们将导航系统的参考框架作为主体框架,并将导航系统的参考框架作为全局框架,如图1所示。
2.1.1 Stable Platform Systems
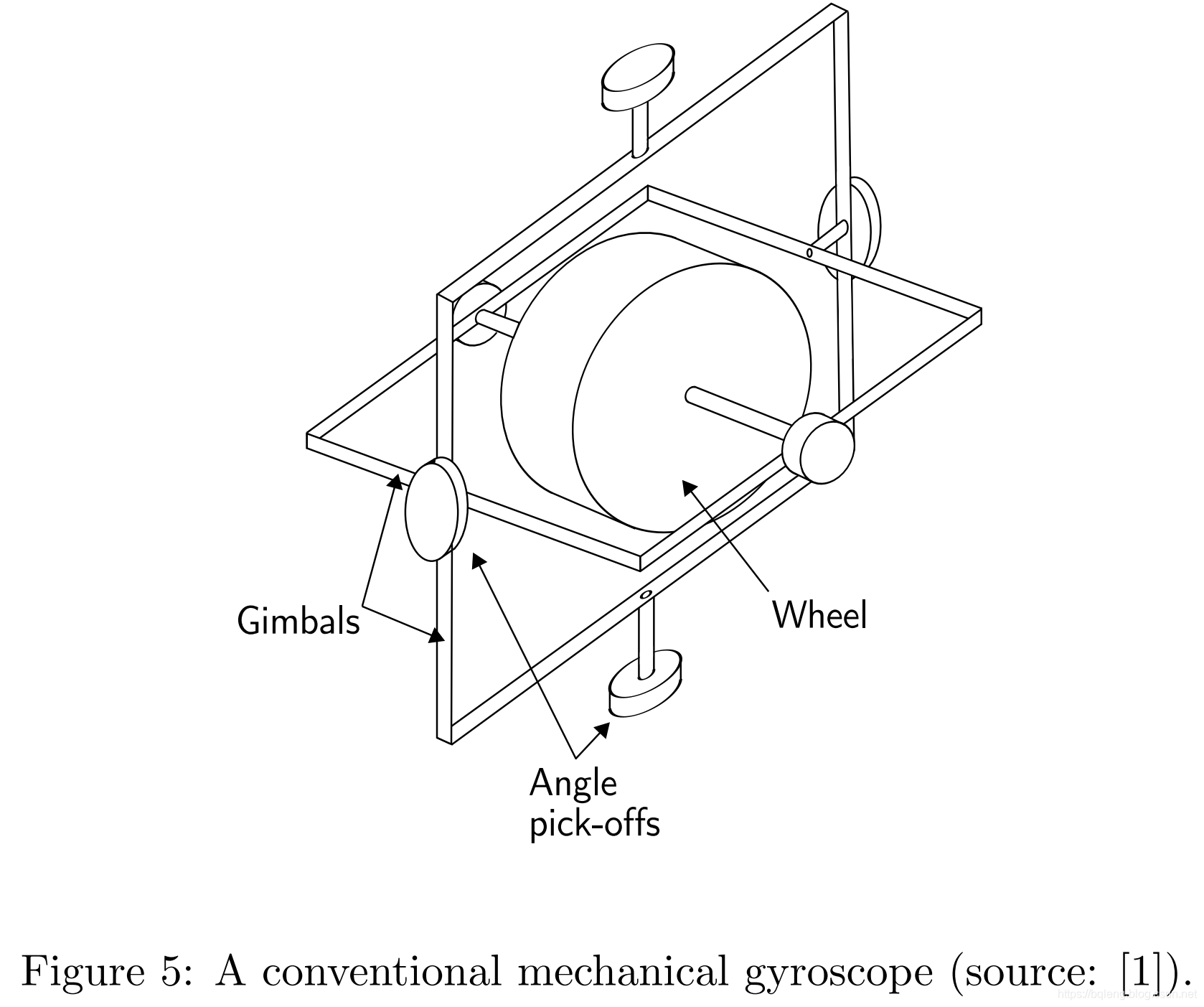
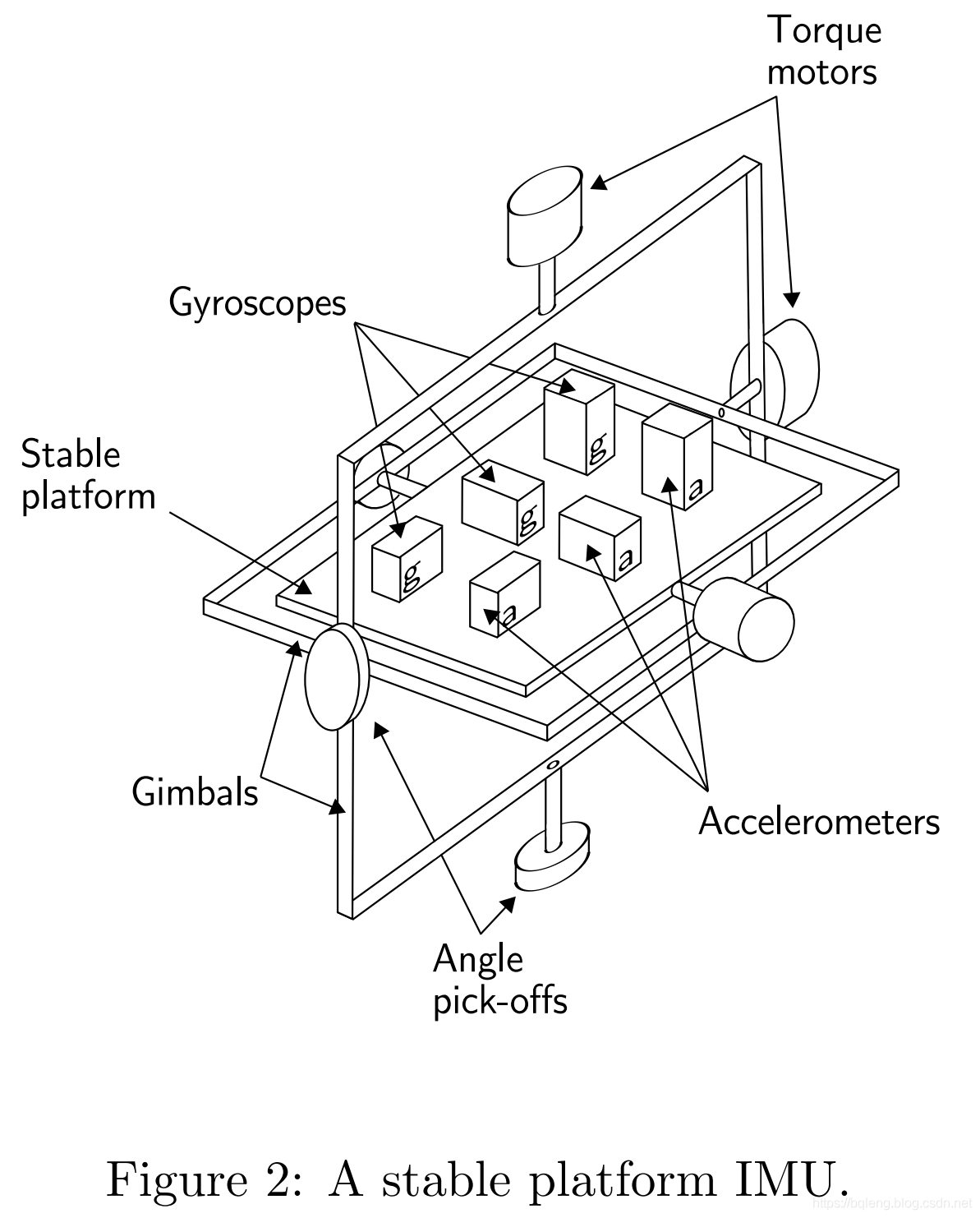
在稳定的平台型系统中,惯性传感器安装在与任何外部旋转运动隔离的平台上。换句话说,平台与全局框架保持一致。这是通过使用gimbals(框架)安装平台来实现的,框架允许平台在所有三个轴上自由移动,如图2所示。安装在平台上的陀螺仪可以检测任何平台的转动。这些信号被反馈到转矩电机,转矩电机旋转框架以抵消这种旋转,从而使平台与全局框架保持一致。
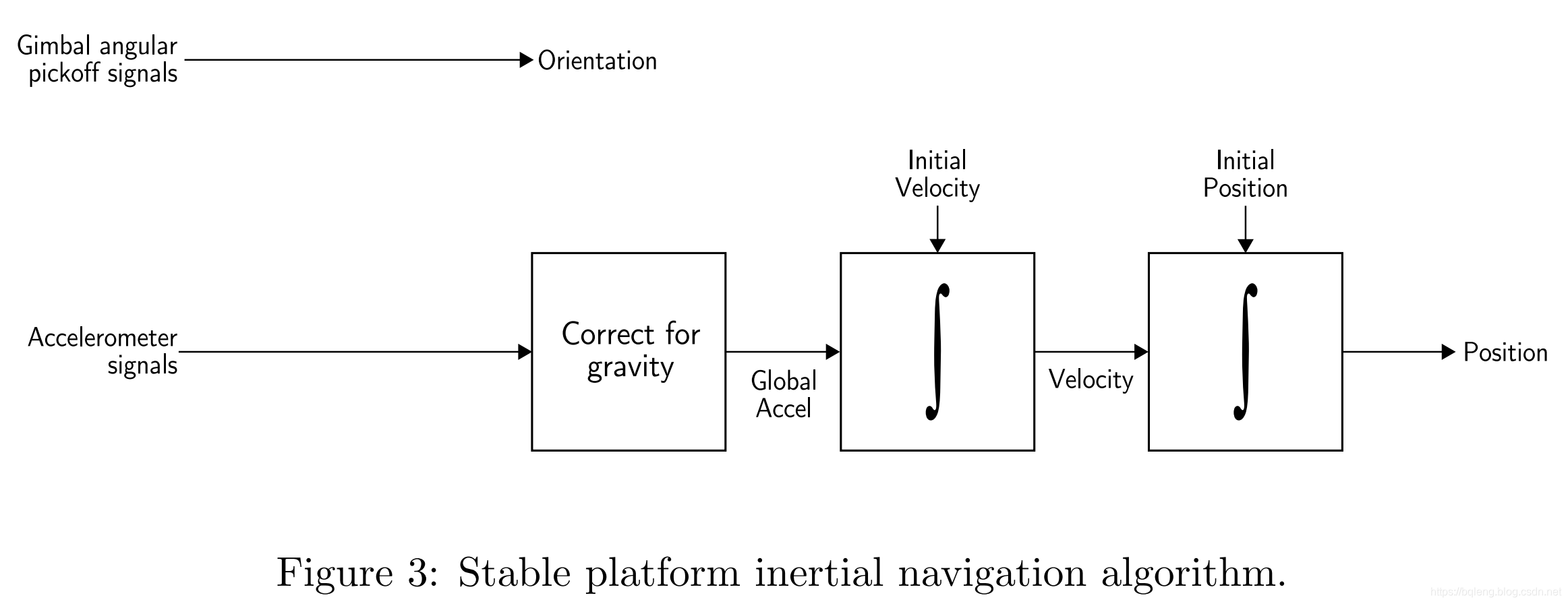
为了跟踪设备的方向,可以使用角度传感器读取相邻框架之间的角度。为了计算设备的位置,安装在平台上的加速度计的信号是双积分的。注意,在执行积分之前,有必要从垂直通道中减去重力加速度。稳定平台惯性导航算法如图所示图3。
2.1.2 Strapdown Systems
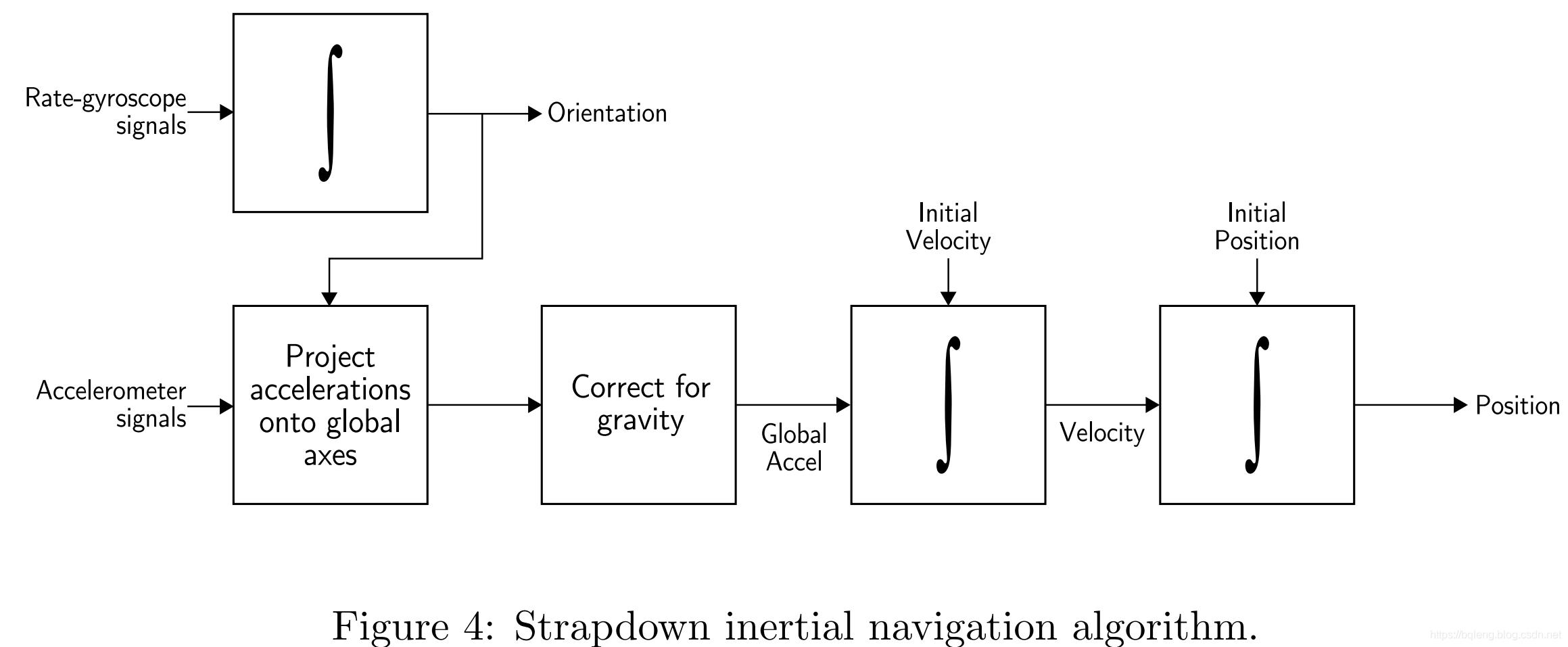
在捷联系统中,惯性传感器被刚性地安装在设备上,因此输出的量是在车身框架而不是整体框架中测量的。如第6节所述,速率陀螺仪的信号被“集成”以跟踪方向。为了跟踪位置,三个加速度计信号被分解成全局坐标使用已知的方向,由陀螺信号的积分决定。然后将全局加速度信号整合到稳定平台算法中。这个过程如图4所示。
稳定平台和捷联系统都基于相同的基本原理。捷联系统降低了机械复杂性,并且在物理上比稳定的平台系统更小。这些好处是以增加计算复杂度为代价实现的。随着计算成本的降低,捷联系统已成为惯性导航系统的主要类型。