过程控制5
5控制器设计1
ーSISO系统ー
目录:
内部模型控制的基本概念
内部模型控制
•内部模型控制和PID控制
•稳定性
•内部模型控制系统的稳定性和可控性
•其他基于模型的控制和PID控制
5.1内部模型控制的基本概念
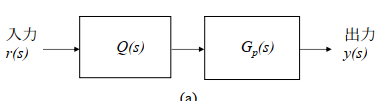
GM(s):控制目标模型(传递函数)
GP(s):真实的动态特性(传递函数)
Q(s):控制器,用于将控制变量y从其当前值尽快移至新的设定值。
设定值信号r(s)
y(s)= Gp(s)Q(s)r(s)
内部模型控制的基本概念
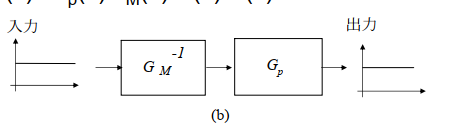
•让我们以过程模型GM(s)的反函数GM(s)-1作为控制器Q(s)。
(理想)y(s)= Gp(s)GM(s)-1r(s)= r(s)
•如果Q(s)设计为GM(s)的倒数,则Q(s) s)是一个有利的函数,其中分子中的s多项式大于分母中的多项式的阶数。
•输入到控制器的输入信号的高阶导数(输出的测量值等),会放大噪声并降低可控性。
内部模型控制的基本概念
•使用分母阶数较大的函数F(s),以使Q(s)分子的阶数不超过分母阶数的二阶以上。

F(s)的选定
F(0) = 1 稳定增益 = 1
F(s) : 被称为滤波器。
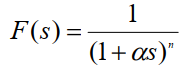
通常:
•当S - > 0时,此F(s)满足F(0)= 1。
选择数字n,以使 F(s)GM(s)^(-1) 分子的阶数增加不超过分母的阶数。
•例如,当n = 1时,响应变为一阶滞后阶跃响应,如上图(c)所示。
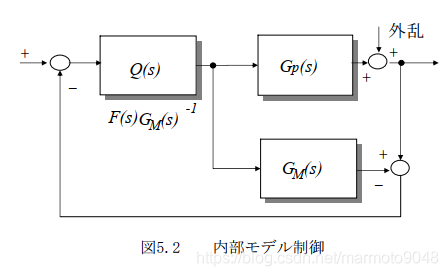
内部模型控制(IMC)Internal Model Control
实际上,存在干扰或模型不同于真实特征(模型误差)。
•如果没有干扰或模型错误,则等效于图5.1c。
当没有模型误差时,从**设定值r(s)和扰动d(s)到控制变量y(s)**的传递函数为
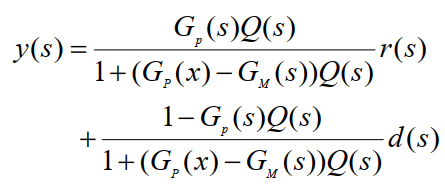
没有模型错误时,Gp(s)= GM(s) ↓ ↓ ↓ ↓ ↓ ↓ ↓ ↓ ↓ ↓ ↓ ↓ ↓ ↓ ↓

示例5.1用于一阶滞后过程的IMC控制器
•过程:Gp(s)= Kp /(1 +τps)
•模型:GM(s)= KM /(1 +τMs)
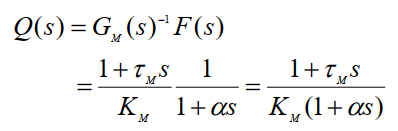
•控制器Q(s)是模型的反函数,并是具有n = 1 的F(s)的复合函数**(F(s)在前边提到过**
当无法获得模型的逆函数时
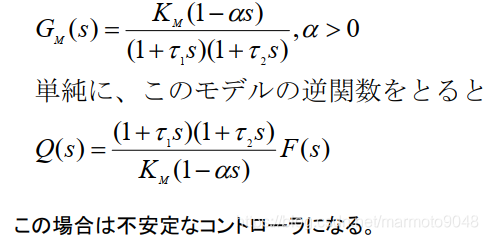
在这种情况下,简单地采用该模型的逆函数会导致控制器不稳定。

eg 5.2

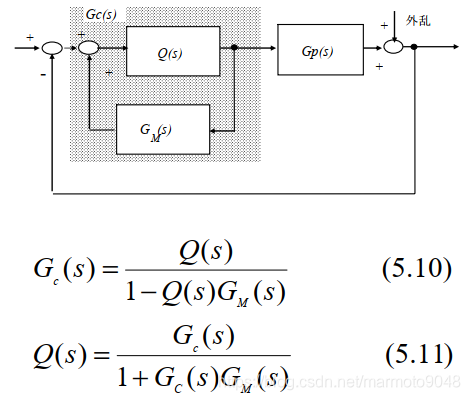
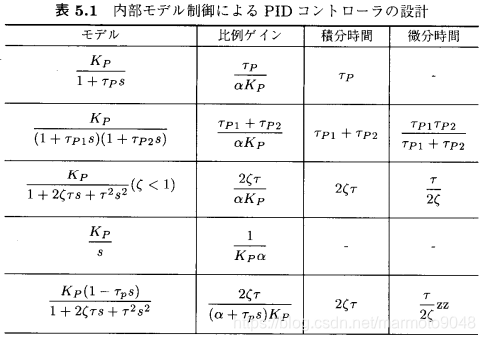
5.2 内部モデル制御とPID制御
• 内部モデル制御(IMC)の制御構造を変形する。
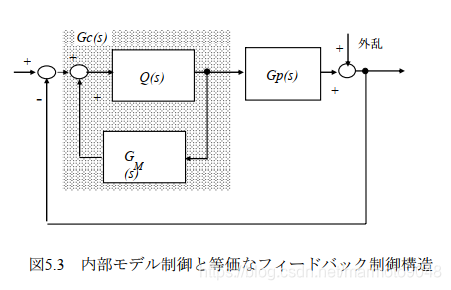
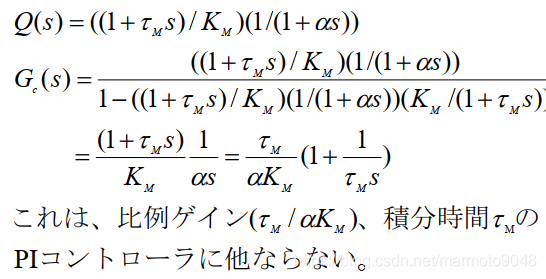
例5.4 例5.1のQ(s)からGc(s) --------- Q(s):控制器,用于将控制变量y从其当前值尽快移至新的设定值 GM(s):控制目标模型(传递函数)
这是除了比例增益和积分时间的PI控制器,别无其他
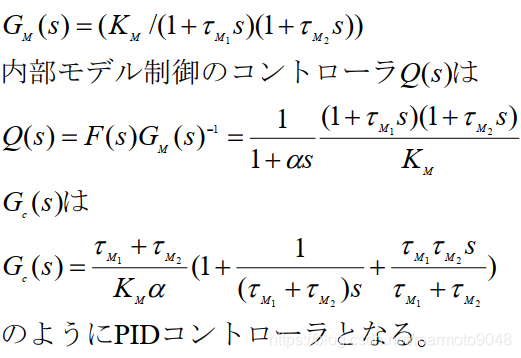
例5.5二阶滞后系统的内部模型控制
停滞时间过程控制器:Smith补偿器
•在停滞时间过程中,出现在控制变量中的调节变量u(s)的作用会因停滞时间而延迟。
•预测将来与空载时间相对应的控制变量的值,并将其反馈给控制器。
•另一方面,估计在控制变量中较晚出现的操作变量的影响,并从观察到的信号中减去。
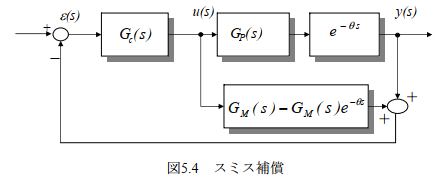
补偿器: 没有误差时:
从过程的设定值r(s) 中控制变量 y(s)的关联系数是
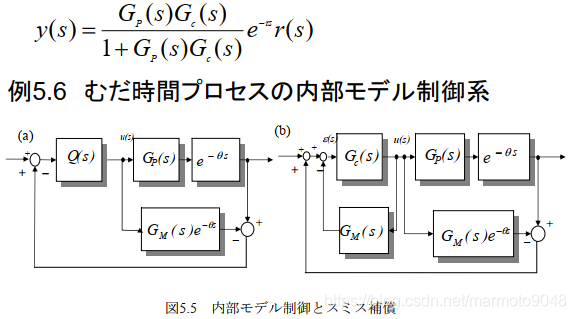
eg 5.6 停滞时间过程的内部模型控制系统

5.3稳定性
P / PID控制器输入/输出

闭环稳定性
•如果通过控制器从偏差信号到控制变量的相移之和为-180°,则控制变量将移位一个周期。
如果幅度变化率> 1,则发散

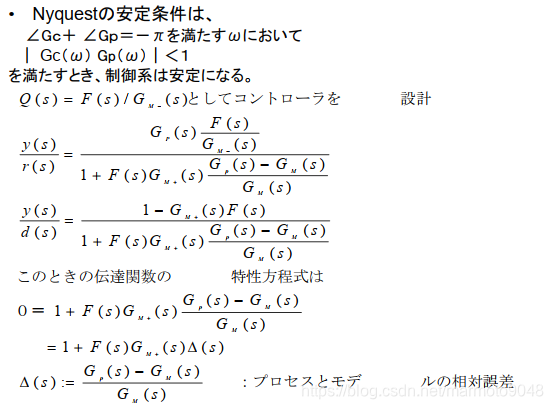
稳定性的条件
当偏差率应用于控制器并显示为操作变量时,振幅的变化率为Ac,相位延迟为∠Φc,
过程中产生的振幅变化为Ac,相位延迟为∠Φp。
满足| Ac(ω)Ap(ω)| <1 , ω满足∠Φc+∠Φp=-π。
•在奈奎斯特图中,由于(-1,0)点的角度为-180度,
因此将控制器和过程串联连接的元件的输入信号的频率(称为环路传递函数)从-∞更改。
当频率响应图在∞范围内变化时与负实轴相交时,它向左相交(-1,0),这等同于稳定性条件。
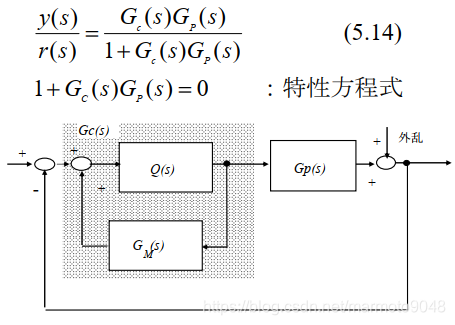
5.4内部模型控制系统的稳定性和可控制性
寻找闭环传递函数
IMC稳定性条件[1]
1、若被控过程P(s) 含有时滞特性,则控制器Q(s) = M^(-1)中含有纯超前项,这在物理上难以实现,不符合因果律。
2、若被控过程P(s) 含有右半平面零点,因为 ,而控制器
,而控制器 ,所以控制器中就会出现右半平面极点,造成控制器本身不稳定,因而闭环系统也不稳定。
,所以控制器中就会出现右半平面极点,造成控制器本身不稳定,因而闭环系统也不稳定。
3、过程模型M(s)严格有理,则理想控制器非有理,即

也就是说,如果M(s)的分母多项式的阶次比分子多项式的阶次高N阶,则控制器中将会出现N阶微分器,尽管这在数学上是成立的,但N阶微分器对于过程测量信号中的噪声极为敏感,因而不切实际。
4、采用理想控制器构成的系统,对于模型误差极为敏感,若 ,则无法确保闭环系统的鲁棒稳定性。
,则无法确保闭环系统的鲁棒稳定性。
IMC控制器设计
为解决上述四个问题,将设计内模控制器分为两个步骤:
1、设计一个稳定的理想控制器,而不考虑系统的鲁棒性和约束;
2、引入滤波器,通过调整滤波器的结构和参数,以期获得理想的动态品质和鲁棒性。
步骤1:过程模型 的分解
的分解
 可分解为两项:
可分解为两项:

其中, 为模型中包含纯滞后和不稳定零点的部分,
为模型中包含纯滞后和不稳定零点的部分, 为模型中的最小相位部分。
为模型中的最小相位部分。
步骤2:IMC控制器设计
在设计IMC控制器时,需在最小相位 的逆上增加滤波器,以确保系统的稳定性和鲁棒性。定义IMC控制器为
的逆上增加滤波器,以确保系统的稳定性和鲁棒性。定义IMC控制器为

式中, 为低通滤波器,选择
为低通滤波器,选择 的目的之一是使变得有理,通常选用以下形式:
的目的之一是使变得有理,通常选用以下形式:

式中,r应该足够大以保证 的可实现性,λ为滤波时间常数,是内模控制器仅有的设计参数。
的可实现性,λ为滤波时间常数,是内模控制器仅有的设计参数。

IMC-PID结合[2]
5.5 其他基于控制和PID控制
基于模型的设计方法:一种使用模型设计控制系统的方法
•IMC:内部模型控制:对模型和过程传递函数进行了区分,并将该模型用于控制器设计。
•I-PD控制
•GMC:常规模型控制
5.5.1 I-PD制御
让对象由以下微分方程表示

如果该微分方程的系数不同,则目标系统的行为自然会不同。
•因此,通过使用控制器更改该方程式的系数,可以改善受控对象的响应特性。

通用模型控制(GMC)

Reference
[1] https://blog.csdn.net/jinpeng_cumt/article/details/103022032 借鉴了老哥的解说,写的非常好
[2] https://www.ixueshu.com/document/6ea1171dcddb4e93318947a18e7f9386.html
