Pointnet网络个人笔记
Pointnet开创性地将深度学习直接用于三维点云任务。由于点云数据的无序性,无法直接对原始点云使用卷积等操作。Pointnet提出对称函数来解决点的无序性问题,设计了能够进行分类和分割任务的网络结构,本文结合源码与个人的理解对于T-net网络和对称函数进行分析。
- 点的无序性
针对点的无序性问题实际上是文章提出了三个方案:
- 对于无序点集进行排序(Pointcnn)。
- 把点集当做序列进行处理,但是这种方法需要对输入点集做所有的排列变换进行数据增强。
- 使用对称函数,Pointnet使用的就是这种方法。
Pointnet网络主要使用对称函数解决点的无序性问题,对称函数就是指对输入顺序不敏感的函数。如加法、点乘、max pooling等操作。假设输入特征为NxD,N表示点数,D表示维度数,在max pooling作用下,取出每个维度上最大值的1xD的向量,每一维特征都与其顺序无关,这样便保证了对于点云输入顺序的鲁棒性。
- 点云的旋转不变性
Pointnet的解决方法是学习一个变换矩阵T,即T-Net结构。由于loss的约束,使得T矩阵训练会学习到最有利于最终分类的变换,如把点云旋转到正面。论文的架构中,分别在输入数据后和第一层特征中使用了T矩阵,大小为3x3和64x64。其中第二个T矩阵由于参数过多,考虑添加正则项,使其接近于正交矩阵,减少点云的信息丢失。
1. T-Net网络结构
将输入的点云数据作为nx3x1单通道图像,接三次卷积和一次池化后,再reshape为1024个节点,然后接两层全连接,网络除最后一层外都使用了ReLU激活函数和批标准化(batch normalization)。
论文中的T-net网络的实际结构并不复杂,我根据个人理解画出T-net的结构。
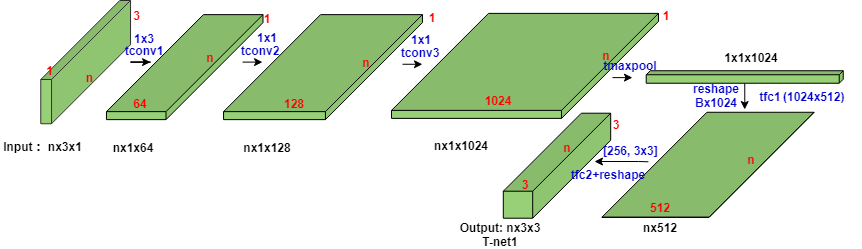
实际训练过程中,T矩阵的参数初始化使用单位矩阵(np.eye(K)), 参数会随着整个网络的训练进行更新,并不是提前单独训练的。很多文章提到T-Net对特征进行对齐,保证了模型的对特定空间转换的不变性,我其实不太理解这种说法。
实际上通过网络结构看出T-net结构是一个mini的Pointnet做特征提取,是个弱监督学习设计,我理解为需要训练一个矩阵对输入点(或者深层特征)进行坐标吧变换,个人认为这样的设计实际上是可以保留原始点云的部分特征,为后面的concat操作提供更多特征。源码中在点云分类部分使用到了T-net,点云分割部分可以不用,对结果并没有太大的提升,原因在于pointnet结构自身不能学到点云点的局部联系,因此即使加入类似结构的T-net也是一样。
- models/transform_nets.py中的网络实现
def input_transform_net(point_cloud, is_training, bn_decay=None, K=3):
""" Input: BxNx3
B=batch size;N=number of pointcloud
Output: 3x3 matrix
"""
batch_size = point_cloud.get_shape()[0].value
num_point = point_cloud.get_shape()[1].value
input_image = tf.expand_dims(point_cloud, -1) # 扩展一维表示通道C,BxNx3x1
# 输入BxNx3x1
# 64个1x3卷积核 (参数[1,3]定义)
# 移动步长 1x1 (stride=[1,1]定义)
# 输出 BxNx1x64
net = tf_util.conv2d(input_image, 64, [1,3],
padding='VALID', stride=[1,1],
bn=True, is_training=is_training,
scope='tconv1', bn_decay=bn_decay)
# 输入 BxNx1x64
# 128个 1x1 卷积核
# 步长 1x1
# 输出 BxNx1x128
net = tf_util.conv2d(net, 128, [1,1],
padding='VALID', stride=[1,1],
bn=True, is_training=is_training,
scope='tconv2', bn_decay=bn_decay)
# 输入 BxNx1x128
# 1024个 1x1卷积核
# 输出 BxNx1x1024
net = tf_util.conv2d(net, 1024, [1,1],
padding='VALID', stride=[1,1],
bn=True, is_training=is_training,
scope='tconv3', bn_decay=bn_decay)
# 池化操作
# 输入 BxNx1x1024
# 输出 Bx1x1x1024
net = tf_util.max_pool2d(net, [num_point,1],
padding='VALID', scope='tmaxpool')
# 输出 Bx1024
net = tf.reshape(net, [batch_size, -1])
# 全连接层
# 输入 Bx1024
# 权重矩阵 1024x512
# 偏置 512x1
# 输出 Bx512
net = tf_util.fully_connected(net, 512, bn=True, is_training=is_training,
scope='tfc1', bn_decay=bn_decay)
# 全连接
# 输出 Bx256
net = tf_util.fully_connected(net, 256, bn=True, is_training=is_training,
scope='tfc2', bn_decay=bn_decay)
# 再次使用全连接,不加ReLU和BN
# 输出 Bx9
with tf.variable_scope('transform_XYZ') as sc:
assert(K==3)
weights = tf.get_variable('weights', [256, 3*K],
initializer=tf.constant_initializer(0.0),
dtype=tf.float32)
biases = tf.get_variable('biases', [3*K],
initializer=tf.constant_initializer(0.0),
dtype=tf.float32)
#初始化为3x3单位矩阵
biases += tf.constant([1,0,0,0,1,0,0,0,1], dtype=tf.float32)
transform = tf.matmul(net, weights)
transform = tf.nn.bias_add(transform, biases)
# reshape
# 输出 Bx3x3
transform = tf.reshape(transform, [batch_size, 3, K])
return transform
针对64x64的网络设计与3x3的一样,只是改变了K值,对于文章提到让特征转化矩阵接近正交化,这样特征损失更小,这部分的实现是在分类任务对损失函数加入正则项,及添加权重reg_weight=0.001,下文分析中会标出。
2. 点云分类部分
这部分主要分析训练代码和点云分类模型的设计
- train.py
# 参数输入处理
parser = argparse.ArgumentParser()
parser.add_argument('--gpu', type=int, default=0,
help='GPU to use [default: GPU 0]')
parser.add_argument('--model', default='pointnet_cls',
help='Model name: pointnet_cls or pointnet_cls_basic [default: pointnet_cls]')
parser.add_argument('--log_dir', default='log', help='Log dir [default: log]')
parser.add_argument('--num_point', type=int, default=1024,
help='Point Number [256/512/1024/2048] [default: 1024]')
parser.add_argument('--max_epoch', type=int, default=250,
help='Epoch to run [default: 250]')
parser.add_argument('--batch_size', type=int, default=32,
help='Batch Size during training [default: 32]')
parser.add_argument('--learning_rate', type=float, default=0.001,
help='Initial learning rate [default: 0.001]')
parser.add_argument('--momentum', type=float, default=0.9,
help='Initial learning rate [default: 0.9]')
parser.add_argument('--optimizer', default='adam',
help='adam or momentum [default: adam]')
parser.add_argument('--decay_step', type=int, default=200000,
help='Decay step for lr decay [default: 200000]')
parser.add_argument('--decay_rate', type=float, default=0.7,
help='Decay rate for lr decay [default: 0.8]')
FLAGS = parser.parse_args()
BATCH_SIZE = FLAGS.batch_size # 训练批次大小
NUM_POINT = FLAGS.num_point # 训练点云点个数
MAX_EPOCH = FLAGS.max_epoch # 最大训练次数
BASE_LEARNING_RATE = FLAGS.learning_rate # 初始学习率
GPU_INDEX = FLAGS.gpu # 默认GPU使用数量
MOMENTUM = FLAGS.momentum # 初始学习率
OPTIMIZER = FLAGS.optimizer # 优化器
DECAY_STEP = FLAGS.decay_step # 衰变步长
DECAY_RATE = FLAGS.decay_rate # 衰变率
# some code ...
# 获取模型
pred, end_points = MODEL.get_model(pointclouds_pl, is_training_pl, bn_decay=bn_decay)
原始点云nx3与T-Net训练后得到的3x3旋转矩阵相乘后,可以理解为变换为一组新的坐标下的点云数据。
- models/pointnet_cls.py中的代码
# 1.原始点云与3x3的T变换矩阵
with tf.variable_scope('transform_net1') as sc:
transform = input_transform_net(point_cloud, is_training, bn_decay, K=3)
point_cloud_transformed = tf.matmul(point_cloud, transform)
input_image = tf.expand_dims(point_cloud_transformed, -1)
# 2.mlp(64,64):使用2次卷积
# 输入 Bxnx3x1
# 64个1x3卷积核
# 输出 Bxnx1x64
net = tf_util.conv2d(input_image, 64, [1,3],
padding='VALID', stride=[1,1],
bn=True, is_training=is_training,
scope='conv1', bn_decay=bn_decay)
# 输入 Bxnx1x64
# 输出 Bxnx1x64
net = tf_util.conv2d(net, 64, [1,1],
padding='VALID', stride=[1,1],
bn=True, is_training=is_training,
scope='conv2', bn_decay=bn_decay)
# 3.接64x64特征转换矩阵
with tf.variable_scope('transform_net2') as sc:
transform = feature_transform_net(net, is_training, bn_decay, K=64)
end_points['transform'] = transform
# 将上一步的net Bxnx1x64压缩为 Bxnx64 和 T-Net的Bx64x64 相乘
net_transformed = tf.matmul(tf.squeeze(net, axis=[2]), transform)
# 4.接3次卷积和1次池化,对应图中的mlp(64,128,1024)+maxpool
pointnet_cls.py
# Bxnx64 扩展为 Bxnx1x64
net_transformed = tf.expand_dims(net_transformed, [2])
# 输入 Bxnx1x64
# 使用64个1x1卷积核
# 输出 Bxnx1x64
net = tf_util.conv2d(net_transformed, 64, [1,1],
padding='VALID', stride=[1,1],
bn=True, is_training=is_training,
scope='conv3', bn_decay=bn_decay)
# 输入 Bxnx1x64
# 使用128个1x1卷积核
# 输出 Bxnx1x128
net = tf_util.conv2d(net, 128, [1,1],
padding='VALID', stride=[1,1],
bn=True, is_training=is_training,
scope='conv4', bn_decay=bn_decay)
# 输入 Bxnx1x128
# 使用1024个1x1卷积核
# 输出 Bxnx1x1024
net = tf_util.conv2d(net, 1024, [1,1],
padding='VALID', stride=[1,1],
bn=True, is_training=is_training,
scope='conv5', bn_decay=bn_decay)
# Symmetric function: max pooling
# 输入 Bxnx1x1024
# 输出 Bx1x1x1024
net = tf_util.max_pool2d(net, [num_point,1],
padding='VALID', scope='maxpool')
# 输出 Bx1024
net = tf.reshape(net, [batch_size, -1])
# 5.全连接1 + dropout
# 输出 batch_size x 512
net = tf_util.fully_connected(net, 512, bn=True, is_training=is_training,
scope='fc1', bn_decay=bn_decay)
net = tf_util.dropout(net, keep_prob=0.7, is_training=is_training,
scope='dp1')
# 全连接2 + dropout
# 输出 batch_size x 256
net = tf_util.fully_connected(net, 256, bn=True, is_training=is_training,
scope='fc2', bn_decay=bn_decay)
net = tf_util.dropout(net, keep_prob=0.7, is_training=is_training,
scope='dp2')
# 全连接3
# 输出 batch_size x 40,因为ModelNet数据集有40个类别的模型
net = tf_util.fully_connected(net, 40, activation_fn=None, scope='fc3')
return net, end_points
# 6.使用交叉熵损失函数计算loss,对网络结构进行训练。
def get_loss(pred, label, end_points, reg_weight=0.001):
""" 预测值pred: B*NUM_CLASSES,
标签值label: B, """
loss = tf.nn.sparse_softmax_cross_entropy_with_logits(logits=pred, labels=label)
classify_loss = tf.reduce_mean(loss)
tf.summary.scalar('classify loss', classify_loss)
# Enforce the transformation as orthogonal matrix
transform = end_points['transform'] # BxKxK
K = transform.get_shape()[1].value
mat_diff = tf.matmul(transform, tf.transpose(transform, perm=[0,2,1]))
mat_diff -= tf.constant(np.eye(K), dtype=tf.float32)
mat_diff_loss = tf.nn.l2_loss(mat_diff)
tf.summary.scalar('mat loss', mat_diff_loss)
#这里加入了reg_weight正则项,使得T-net部分获得的特征转移矩阵更接近与正交化
return classify_loss + mat_diff_loss * reg_weight
# 模型优化器选择:adam
# 学习率初始值:0.001
# 动量=0.9
# batch_size =32
# 学习率每训练20个epochs后减半
# GTX1080 ModelNet 需要3-6小时
对于pointnet_cls_basic.py没有使用T-net的点云分类,网络结构更容易理解,比加入T-net的结构性能略低。
3. 点云分割部分
- 点之间的相关性问题
针对与分割物体上的问题与分类任务不同,分类任务中特征经过max pooling得到一维特征向量,它包含了全局信息,再经过全连接网络,得到1*K的k个类别预测得分即为分类结果。而分割任务中,需要对每一个点输出所属类别,使用类似二维图像分割的上采样过程(跳步连接skip-links)。Pointnet针对分割任务也使用了类似图像分割任务的,高层全局信息与底层局部特征结合的思想。
针对Pointnet论文作者提供的版本(Tensorflow)的源码如下:https://github.com/charlesq34/pointnet
对于pointnet源码其余部分的介绍不详细展开,根据个人理解将源码的结构与功能设计展示如下:
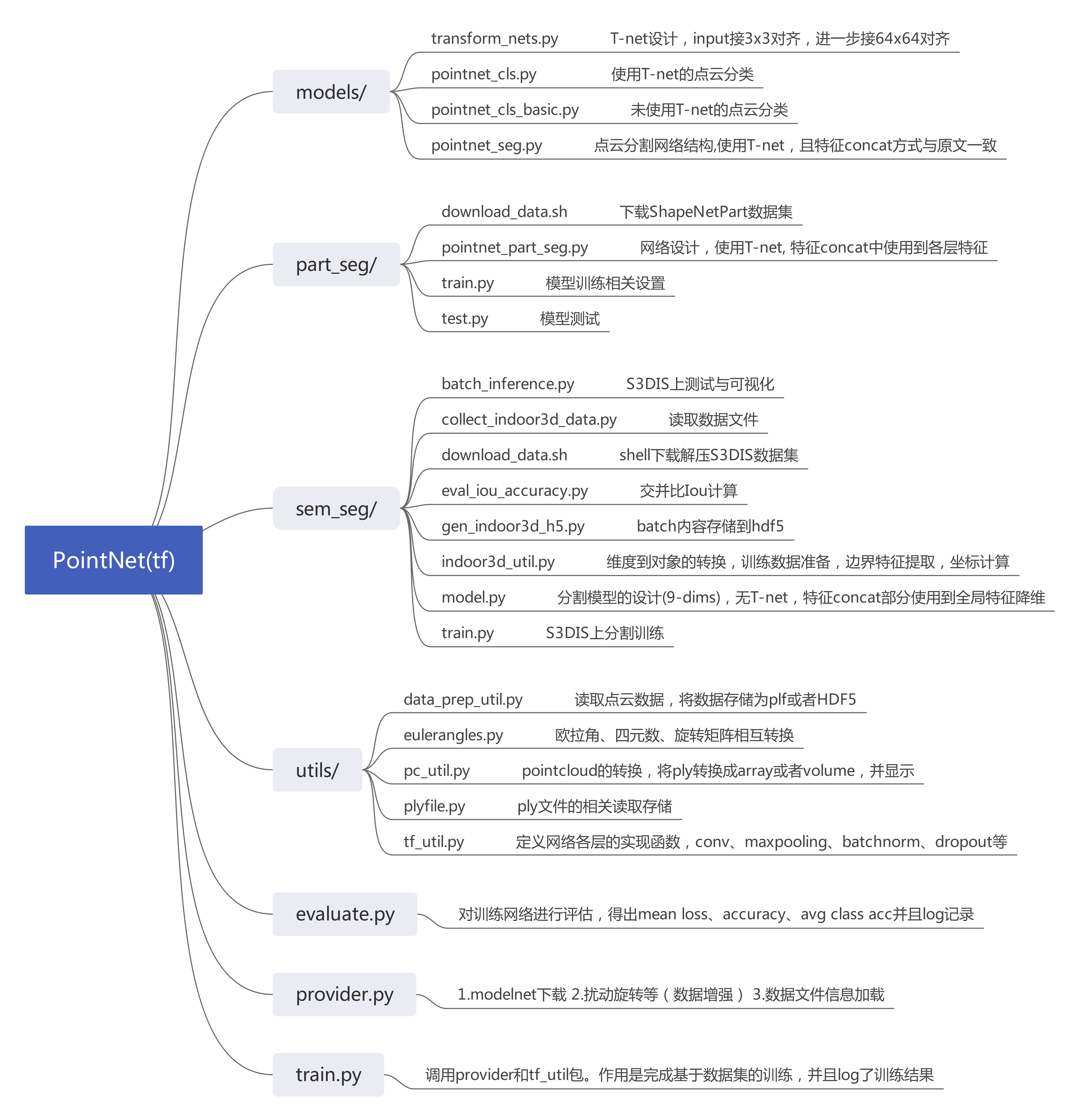
分割部分的代码实现主要在part_seg/(部件分割)和sem_seg/(场景分割)下。其中part_seg中底层局部特征与高层全局特征的连接**(concat)使用到了各层特征**。
sem_seg/model.py场景分割中需要注意论文使用的S3DIS数据维度不再是3维而是更高的9维度(XYZ+RGB+相对于房间的标准化后的位置信息),特征连接部分使用高层全局特征的降维然后与高维特征本身concat,并不是论文中提到的方式。
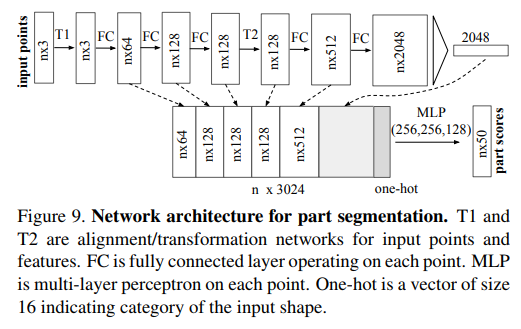
而论文中提到的分割结构实际是在models/pointnet_seg.py中实现,即max pooling后的1D特征向量,使用tf.tile()复制n份(n个特征点),与之前网络得到的 n * 64特征矩阵分别concat。得到一个n(64+D)的特征矩阵,再经一系列的特征变换操作,得到每个点的分类结果。
结语
本文主要结合代码层面总结了pointnet网络的分类和分割任务的实现。主要是理解pointnet是如何做到直接从原始点云数据中提取高维特征,并且解决好点云的特性。实际上基于pointnet结构可以进行很多任务,比如点云配准,物体检测,3D重建,法向量估计等,只需要根据具体任务合理修改网络后几层的结构,利用好网络提取的高维特征。
针对pointnet存在的点与点之间相关性的缺失,在pointnet++中使用局部采样+分组+pointnet的结构进行解决,并考虑到了点云的稀疏性解决方案,之后很多深度学习的研究在此基础上展开,习惯上称为pointnet家族(point-wise MLP),比如Frustum,flowNet 3D,LSAnet,PAT等等。个人认为更高的准确度需要点云等3D数据与图像结合进行深度学习训练,将图像的高分辨率优势借鉴进来会有更好的效果。
源码地址:
1.原论文实现代码
https://github.com/charlesq34/pointnet
2.基于pytorch实现:
https://github.com/fxia22/pointnet.pytorch
https://github.com/yanx27/Pointnet_Pointnet2_pytorch
