背景:
基于PCL获取Kinect1的实时点云,并可视化,这个功能在官方的指导教程点击打开链接里有。但是,我需要突出视野中心的那部分点云,还有加一个一键保存点云数据的功能。所以我自己写了个小程序,代码在下面有。
注:
还有,官方的指导教程里的代码会使Kinect读到的点云在可视化的时候是上下颠倒的,我修复了这个bug。
如果跑我的代码时候,遇到这个问题error: pcl/io/openni_grabber.h: No such file or directory,请参考我的另一文章:点击打开链接
1. 代码:
#include <pcl/io/openni_grabber.h>
#include <pcl/visualization/cloud_viewer.h>
#include <pcl/filters/passthrough.h>
#include <pcl/io/pcd_io.h>
#include <pcl/common/transforms.h>
#include <string>
#include <iostream>
#include <vector>
boost::mutex cloud_mutex;
pcl::PointCloud<pcl::PointXYZ>::ConstPtr cloud_global;
class SimpleOpenNIViewer
{
public:
SimpleOpenNIViewer () {}
//回调函数,回传收到的点云到run()函数里
void cloud_cb_ (const pcl::PointCloud<pcl::PointXYZ>::ConstPtr &cloud, pcl::PointCloud<pcl::PointXYZ>::Ptr &cloud_out, bool* new_cloud_available_flag)
{
//锁住,不允许此段时间内,点云数据被修改
cloud_mutex.lock();
*cloud_out = *cloud;
*new_cloud_available_flag = true;
cloud_mutex.unlock();
}
//kinect读到的点云是在viewer.showCloud里是颠倒的,这个函数就是把它再颠倒过
pcl::PointCloud<pcl::PointXYZ>::Ptr upsideDown(const pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_in){
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_transformed (new pcl::PointCloud<pcl::PointXYZ>);
Eigen::Matrix4f transform = Eigen::Matrix4f::Identity();
transform(1,1) = -1;
transform(2,2) = -1;
pcl::transformPointCloud(*cloud_in, *cloud_transformed, transform);
return cloud_transformed;
}
//突出中间的部分的点云
pcl::PointCloud<pcl::PointXYZI>::Ptr highlightMiddleArea(const pcl::PointCloud<pcl::PointXYZ>::Ptr &cloud_in){
pcl::PointCloud<pcl::PointXYZI>::Ptr cloud_out (new pcl::PointCloud<pcl::PointXYZI>);
pcl::PassThrough<pcl::PointXYZ> pt;
pcl::IndicesPtr reserve_indices (new std::vector <int>);
pcl::copyPointCloud(*cloud_in, *cloud_out);
pt.setInputCloud(cloud_in);
pt.setFilterFieldName("x");
//突出x方向上(-0.3,0.3)这个范围内的点云
pt.setFilterLimits(-0.3, 0.3);
pt.filter(*reserve_indices);
for (int i = 0; i < (*reserve_indices).size(); i++){
cloud_out->points[(*reserve_indices)[i]].intensity = 10;
}
return cloud_out;
}
//代码的核心部分,整个流程都在这里安排
void run (boost::shared_ptr<pcl::visualization::CloudViewer> viewer)
{
bool new_cloud_available_flag = false;
pcl::Grabber* interface = new pcl::OpenNIGrabber();
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_out (new pcl::PointCloud<pcl::PointXYZ>);
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_tmp (new pcl::PointCloud<pcl::PointXYZ>);
pcl::PointCloud<pcl::PointXYZI>::Ptr cloud_toshow (new pcl::PointCloud<pcl::PointXYZI>);
//注册回调函数
boost::function<void (const pcl::PointCloud<pcl::PointXYZ>::ConstPtr&)> f =
boost::bind (&SimpleOpenNIViewer::cloud_cb_, this, _1, cloud_out, &new_cloud_available_flag);
interface->registerCallback (f);
//start()之后,点云数据源源不断的传到cloud_out
interface->start ();
while (!viewer->wasStopped())
{
if (new_cloud_available_flag){//如果有新的点云获取
cloud_mutex.lock(); //锁住,不允许此段时间内,点云数据被修改
cloud_tmp = upsideDown(cloud_out);//颠倒点云,为了可视化
cloud_mutex.unlock();
cloud_toshow = highlightMiddleArea(cloud_tmp);
viewer->showCloud(cloud_toshow);//可视化点云
cloud_global = cloud_tmp; //传点云到keyboardEventOccured()里
new_cloud_available_flag = false;
}
}
interface->stop ();
}
};
//回调函数,当键盘有输入时,被调用
void keyboardEventOccured(const pcl::visualization::KeyboardEvent &event, void *nothing){
if (event.getKeySym() == "space" && event.keyDown()){//当按下空格键时
cout << "Space is pressed => pointcloud saved as output.pcd" << endl;
pcl::io::savePCDFile("output.pcd", *cloud_global);
}
}
int main ()
{
boost::shared_ptr<pcl::visualization::CloudViewer> viewer2 (new pcl::visualization::CloudViewer ("a viewer"));
//绑定可视化窗口和键盘事件的函数
viewer2->registerKeyboardCallback(keyboardEventOccured,(void*)NULL);
SimpleOpenNIViewer v;
v.run (viewer2);
return 0;
}
2. 跑的效果
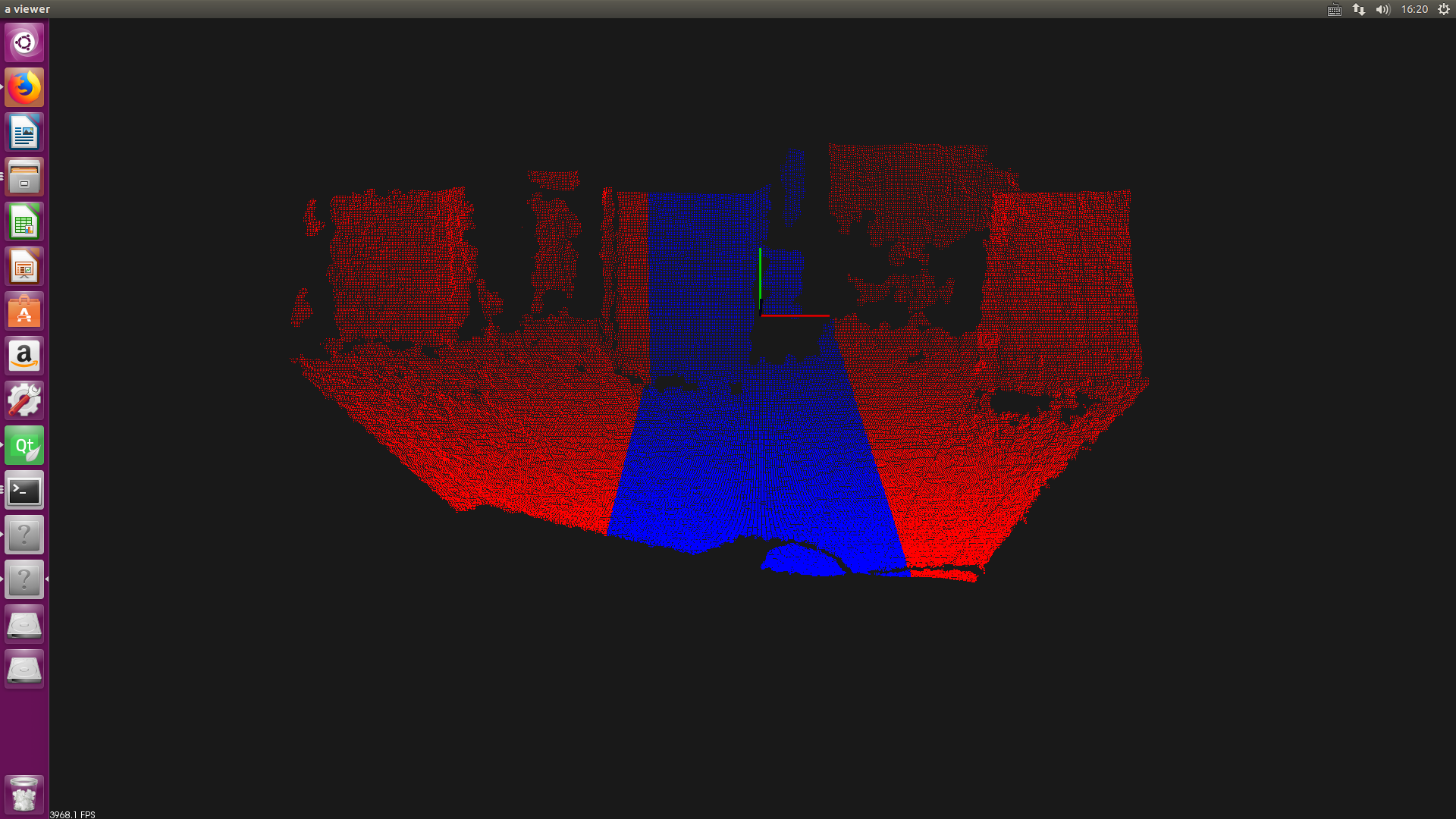
GetDataFromKinect/bin/GetKinectData...
Space is pressed => pointcloud saved as output.pcd