首先想实现的目的是:(有两个,第一个是距离检测;第二个是已完成的码垛箱体边缘位置检测。)
1、在码垛机器人的三面装上传感器,实现前、左、右的距离感知。(环境是:机器人需要进入码头的大集装箱里边,实现在集装箱内部的码垛,该集装箱内部是类似于锯齿状的结构,所以左右不能用点激光来进行距离的检测,至少应该是线激光。前边要检测的是距离已完成的码垛箱体的距离位置。)
2、找到已完成的部分码垛的箱体的边缘位置,从而引导下一步码垛时的位置矫正。
---------------------1针对于第一个问题的调研:
首先与伟景公司进行沟通,他们推荐使用基于tof原理来实现左右距离的感知:
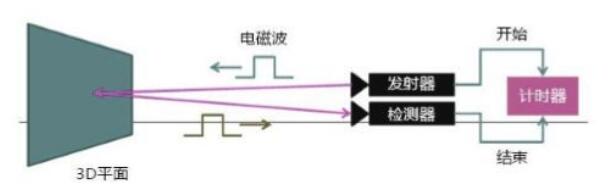
(1)TOF:OF是3D深度摄像头的其中一种方案,是结构光的同门师弟。TOF是“time-of-flight”的简称,也叫“飞行时间测距法“。
原理是通过向目标物体打光,测量光在镜头和物体之间传输时间来测距,通过这些数据来判断这个物体距离我们有多远,进而知道画面里每一个物体的距离,从而实现深度图,最后就可以直接绘制出立体图像达成3D立体深度感应。
(2)基于TOF的光源分类:
不同类型TOF相机会使用不同的光源,有LED的,也有激光的。
(3)介绍:
TOF这个3D模块中最核心的器件在于TOF芯片,它集众多功能于一身,包括驱动投射器,接收反射光线,进而生成raw图,再送给软件处理成深度信息。
(4)TOF与结构光比较
- TOF的工作距离比结构光要远很多,所以比较适合用在手机的后置摄像头中,用于体感游戏。
结构光的工作距离非常近,所以一般都用在手机的前摄像头用来进行人脸识别,如:iPhone X 的新款手机。
- TOF技术发射的不是散斑或编码图案,而是面光源,在一定距离内光信息不会出现大量的衰减,配合TOF芯片背照式的、大pixel size的设计,大幅提升了光线收集率和测距速度,使远距离应用成为可能。这也是TOF可以被用作手机后摄,而结构光无法用作后摄的原因之一。
3D结构光投射的是散斑或编码图案,接收模组需要拍摄到清晰的图案才能计算出深度。而随着距离的增加,投出的图案或出 现模糊,或出现亮度能量上的衰减,导致深度图不完整,出现破洞,甚至于失效,所以3D结构光并不适用于远距离深度信息 采集。
以下表中的❓是表示不是很理解原因?
| TOF | 结构光 | |
| 基础原理 | 红外光反射时间差 | 单相机和投影条纹斑点编码 |
| 响应时间 | 快 | 慢 |
| 低光环境表现 | 良好(红外激光) | 良好,取决于光源 |
| 强光环境表现 | 中等 | 弱 |
| 深度精确度 | 低 | 中等 |
| 分辨率 | 低 | 中等 |
| 识别距离 | 中等(1-10m),受光源强度限制 | 短,受光斑图案影响 |
| 软件复杂度 | 中等 | 中等 |
| 材料成本 | 中等 | 高 |
| 功耗 | 低 | 中等 |
| 缺点 | 总体性能好,平面分辨率低? | 容易受光照影响? |
以下是3D视觉方案对比:
| 3D视觉方案对比 | |||
| 方案 | 3D结构光方案 | TOF方案 | 双目视觉方案 |
| 基础原理 | 散斑结构光 | 飞行时间 | 视差算法 |
| 光源 | 15000个散斑 | 均匀面光源 | 无(被动式) |
| 工作距离 | 0.2m到1.2m | 0.4m到5m | |
| 深度精度? | 高 误差0.5%-0.1% |
中 误差0.5%-1% |
差 误差5%-10% |
| XY发分辨率? | 高 | 低 | 中 |
| 低光表现 | 高 | 高 | 低 |
| 室外表现(日光) | 低 | 中 | 高 |
| 功耗 | 中 | 中 | 高 |
| 应用范围 | 人脸识别、人脸支付 | 3D建模、AR应用、体感游戏 | 背景虚化 |
什么是主动式什么是被动式:
首先,不加验证的给出一个经验结论(不保证全场景正确),目前我们使用的任何与定位或者避障方案都无可避免的使用了波。扩展一点来说,我们想观察一个实体实物,如果不准接触(甚至接触的也得用,脑电,心电),那似乎也只有波能满足我们的需求了主动的或者被动的,主动的就是设备主动发出波,并接受反馈回来的波,进行分析(时间,图案,相位,携带信息…)从而得出探测信息或者相对位置信息。被动的就是自己不发射波,但接受自然界本来有的波(相机),来获取相关信息。
-------扩展-----
我们平时会使用到的应该是有:
- 超声波测距
- 毫米波雷达
- 激光雷达
- 固态雷达
- RGBD摄像头
- 双目摄像头(上边已涉及)
- 单目摄像头
- TOF 飞行时间(上边已涉及)
- 三角测距
- 结构光(上边已涉及)
虽然这些词汇一起出现的频率很高,但事实上之前在用的时候经常并不能确定某个方案所使用的技术细节究竟是什么样的,例如,扫地机器人究竟用了哪个雷达,而这个雷达又用了什么技术呢?
我们无论是要避障,还是定位,都离不开获取测量被测物体与测量装置之间的相对位置关系,而根据被测物体的任意点的相对位置关系,我们可以获得被测物体的整体位置信息甚至组成三维结构。
根据初中物理知识,由于能检测波的速度是确定的,所以我们可以很容易的根据这个时间确定物体距离。目前使用这种方案测量的设备不在少数,而根据所使用的的波不同(种类不同或者波长不同),即可有超声波,毫米波雷达,激光雷达等等不同的实现手段。
超声波发射器向某一方向发射超声波,在发射时刻的同时开始计时,超声波在空气中传播,途中碰到障碍物就立即返回来,超声波接收器收到反射波就立即停止计时。超声波在空气中的传播速度为340m/s,根据计时器记录的时间t,就可以计算出发射点距障碍物的距离(s),即:s=340t/2 。
| 技术关键点 | 典型值(技术细节不同,值范围可能会较大) |
|---|---|
| 探测距离 | 10米或100米,大部分实现在10米以内 |
| 精度 | 厘米级,分辨力极低,几十度 |
| 成本 | 极低,百元以内 |
| 缺陷 | 反射面是平面(适用场景少)??? |
| 缺陷 | 速度慢,声波速度340 m/s |
| 缺陷 | 对灰尘等环境适应性差 |
毫米波雷达指工作在毫米波波段的雷达。通常毫米波是指30~300GHz频域(波长为1~10mm)的电磁波,毫米波雷达分为远距离雷达(LRR)和近距离雷达(SRR),由于毫米波在大气中衰减弱,所以可以探测感知到更远的距离,其中远距离雷达可以实现超过200m的感知与探测。毫米波雷达的多项优势,使其目前在汽车防撞传感器中占比较大。目前市场主流使用的车载毫米波雷达按照其频率的不同,主要可分为两种:24GHz毫米波雷达和77GHz毫米波雷达。通常24GHz雷达检测范围为中短距离,用作实现BSD(BlindSpotDectection,盲点探测系统),而77GHz长程雷达用作实现ACC(AdaptiveCruiseControl,自适应巡航系统)。
PS:毫米波在雷达中应用的主要限制有:雨、雾和湿雪等高潮湿环境的衰减,以及大功率器件和插损的影响降低了毫米波雷达的探测距离;树丛穿透能力差,相比微波,对密树丛穿透力低;元器件成本高,加工精度相对要求高。
| 技术关键点 | 典型值(技术细节不同,值范围可能会较大) |
|---|---|
| 探测距离 | 最大200米,典型10米左右 |
| 频段 | 24GHZ(民用);60GHZ;77GHZ(车用) |
| 精度 | 厘米级 |
| 成本 | 低,千元或更低 |
| 优势 | 不受光线尘埃影响 |
| 缺陷 | 传播耗损较大,易被人体等吸收 |
| 缺陷 | 分辨率不高,3度以上 |
激光雷达是目前无人驾驶中最重要的传感器,原理是激光器发射一个激光脉冲,并由计时器记录下出射的时间,回返光经接收器接收,并由计时器记录下回返的时间。两个时间相减即得到了光的“飞行时间”,而光速是一定的,因此在已知速度和时间后很容易就可以计算出距离。
PS:在TOF方案中,距离测量依赖于时间的测量。但是光速太快了,因此要获得精确的距离,对计时系统的要求也就变得很高。一个数据是,激光雷达要测量1cm的距离,对应的时间跨度约为65ps,导致激光雷达的价格较高。
激光雷达的另一个重要的指标是线数。按线数分类的话有常见的有单线,4线,16线,32线,64线等
单束激光发射器在激光雷达内部进行匀速的旋转,每旋转一个小角度即发射一次激光,轮巡一定的角度后,就生成了一帧完整的数据。因此,单线激光雷达的数据可以看做是同一高度的一排点阵。
单线激光雷达的数据缺少一个维度,只能描述线状信息,无法描述面。也就无法得到物体垂直于激光雷达发射平面的高度信息。
多线雷达是目前自动驾驶最主要使用的雷达,但售价极高。见介绍链接:https://blog.csdn.net/m0_37957160/article/details/108793973
另外,目前低成本单线激光雷达(淘宝上几百块到几千块的)的并不是基于Tof方案,而是采用了三角测距方案。

| 技术关键点 | 典型值(技术细节不同,值范围可能会较大) |
|---|---|
| 探测距离 | 200米 |
| 频段 | 3.846×10^14 Hz到7.895×10^14 Hz |
| 精度 | 毫米(近距离)-厘米级 |
| 成本 | 高,价格根据线数不等 16线国产 2.8万 国外4.0万 |
| 优势 | 精准,分辨率高,速度快 |
| 缺陷 | 阴雨天,浓雾等天气无法工作 |
-------3D成像方法总结:以下要介绍的是真正的3D成像,得到物体三维的图形,是立体的图像。而不是利用人眼视觉差异的特点,错误感知到的假三维信息。
在原理上分为以下几类:
- 双目视觉(双目立体视觉法(Stereo Vision))
- 激光三角(激光三角法(Laser triangulation))
- 结构光(结构光3D成像(Structured light 3D imaging))
- ToF(飞行时间法ToF(Time of flight))
- 光场(光场成像法(Light field of imaging))
- 全息(全息投影技术(Front-projected holographic display))
而激光雷达不是3D成像原理上的一个分类,而是一种具体方法。
激光雷达的3D成像原理有:三角测距法、飞行时间ToF法等。
激光雷达按照实现方式分类有:机械式、混合固态、基于光学相控阵固态 、基于MEMS式混合固态、基于FLASH式固态等。
(结构光与激光:激光是光源的一种,是由发光机理决定的。 广义上,可以说任意光源,包括激光、LED发的光、汞灯、荧光甚至太阳光等,经过调制变成具有一定结构的光都可以叫结构光)