本文将继续为大家解析自动驾驶所涉及到的核心技术,上篇《感知篇》内容以及中篇《决策篇》内容请点击历史原文查看。
三、执行篇
如果说环境感知系统相当于驾驶员的眼睛、决策规划系统相当于驾驶员的大脑,那么执行控制系统就相当于驾驶员的手脚。
具体而言,自动驾驶控制执行系统是指系统做出决策规划以后,替代驾驶员对车辆进行控制,反馈到底层模块执行任务。
可以说,执行控制系统是自动驾驶汽车行驶的基础,车辆的各个操控系统需要通过总线与决策系统相连接,并能够按照决策系统发出的总线指令精确地控制加速程度、制动程度、转向幅度、灯光控制等驾驶动作,以实现车辆的自主驾驶。
本文将详细介绍自动驾驶控制执行模块的核心技术、主流控制算法以及技术方案等内容。
Ξ 1.核心技术
自动驾驶控制执行的核心技术主要包括车辆的纵向控制和横向控制技术。
纵向控制,即车辆的驱动与制动控制,是指通过对油门和制动的协调,实现对期望车速的精确跟随。横向控制,即通过方向盘角度的调整以及轮胎力的控制,实现自动驾驶汽车的路径跟踪。
1)纵向控制
车辆纵向控制是指在行车速度方向上的控制,即车速以及本车与前后车或障碍物距离的自动控制。
自动驾驶汽车采用油门和制动综合控制的方法来实现对预定车速的跟踪,各种电机-发动机-传动模型、汽车运行模型和刹车过程模型与不同的控制算法相结合,构成了各种各样的纵向控制模式,典型的纵向控制系统结构如下图所示: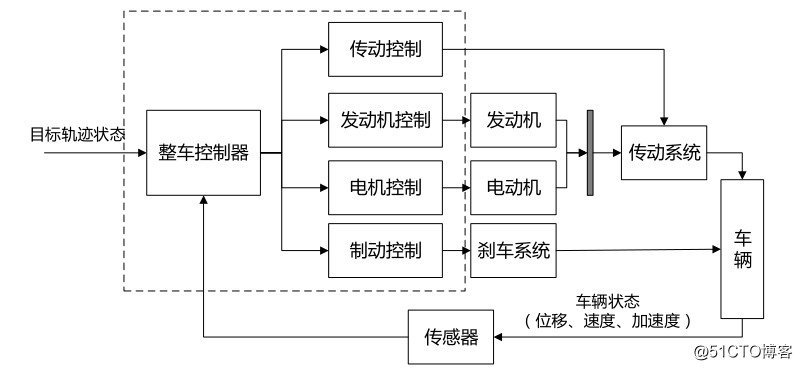
自动驾驶纵向控制系统作为自动驾驶汽车最重要的控制系统之一,是解决交通堵塞、降低交通事故发生率的有效方式之一。
纵向控制系统对危险场景的反应速度快,避撞控制精确、有效,可最大限度避免交通事故的发生以及人员的伤亡。此外,纵向控制系统在保证行驶安全的前提下,还可缩短车间距离,有效提高道路通行率,减轻因堵车造成的环境污染。
2)横向控制
车辆横向控制指垂直于运动方向上的控制,即转向控制。横向控制系统目标是控制汽车自动保持期望的行车路线,并在不同的车速、载荷、风阻、路况下均有很好的乘坐舒适性和稳定性。
典型的横向控制系统结构如下图所示: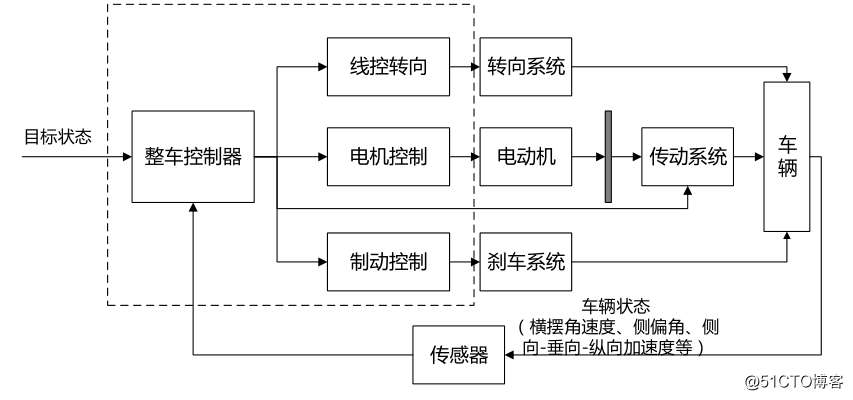
车辆横向控制大致可以分为两种基本设计方法:基于驾驶员模拟的方法和基于车辆动力学模型的控制方法。
基于驾驶员模拟的方法又可以详细划分为两种,一种是使用较简单的动力学模型和驾驶员操纵规则设计控制器,另一种是用驾驶员操纵过程的数据训练控制器获取控制算法。
基于车辆动力学模型的方法,需要建立较精确的汽车横向运动模型。典型模型如单轨模型,该模型认为汽车左右两侧特性相同。
Ξ 2.控制算法
自动驾驶控制方法可划分为两种,分别为传统控制方法与智能控制方法。
1)传统控制方法
传统的控制方法主要有PID 控制、模糊控制、最优控制、滑模控制(预测模型控制MPC)等。
PID控制,又称之为比例积分微分控制,是最早发展起来的控制策略之一。其原理简单来说,是根据给定值和实际输出值构成控制偏差,将偏差按比例、积分和微分通过线性组合构成控制量,对被控对象进行控制。
由于其算法简单、鲁棒性好和可靠性高,至今仍有90%左右的控制回路具有PID结构。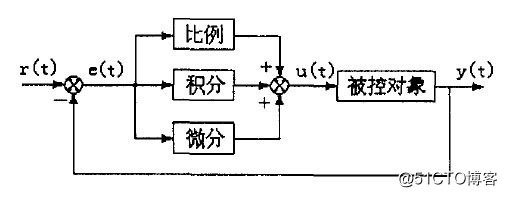
模糊控制,全称为模糊逻辑控制,是以模糊集合论、模糊语言变量和模糊逻辑推理为基础的一种计算机数字控制技术。
与经典控制理论相比,模糊逻辑控制策略最大的特点是不需要准确的数学公式来建立被控对象的精确数学模型,因此可极大简化系统设计和数学建模的复杂性,提高系统建模和仿真控制的效率。不过,模糊控制的设计缺乏系统性,对复杂系统的控制是存在一定问题。
最优控制着重于研究使控制系统的性能指标实现最优化的基本条件和综合方法。可以概括为:对一个受控的动力学系统或运动过程,从一类允许的控制方案中找出一个最优的控制方案,使系统的运动在由某个初始状态转移到指定的目标状态的同时,其性能指标值为最优。
滑模控制也叫变结构控制,本质上是一类特殊的非线性控制。该控制策略与其他控制的不同之处在于系统“结构”不固定,可以在动态过程中根据系统当前的状态有目的地不断变化,迫使系统按照预定“滑动模态”的状态轨迹运动。
由于滑动模态可以进行设计且与对象参数及扰动无关,因此滑动控制具有快速响应、对应参数变化及扰动不灵敏、无需系统在线辨识、物理实现简单等优点。
不过,滑动控制也并不是全无缺点。在实际应用中,当状态轨迹到达滑动模态面后,难以严格沿着滑动模态面向平衡点滑动,而是在其两侧来回穿越地趋近平衡点,这会产生震动影响正常应用。
2)智能控制方法
智能控制方法与传统的控制方法最大的不同在于,智能控制方法更关注于控制对象模型的运用和综合信息学习运用。常见的智能控制方法主要有基于模型的控制、神经网络控制和深度学习方法等。
基于模型的控制,一般称为模型预测控制,它的当前控制动作是在每一个采样瞬间通过求解一个有限时域开环最优控制问题而获得。
其基本原理可概括为:在每个采样时刻,根据当前获得的当前测量信息,在线求解一个有限时域的开环优化问题1,并将得到的控制序列的第一个元素作用于被控对象,在一个采样时刻,重复上述过程,再用新的测量值刷新优化问题并重新求解。
这种控制方法的优点是对模型的精度要求不高,建模方便,且因为采用非最小化描述的模型,系统鲁棒性、稳定性较好。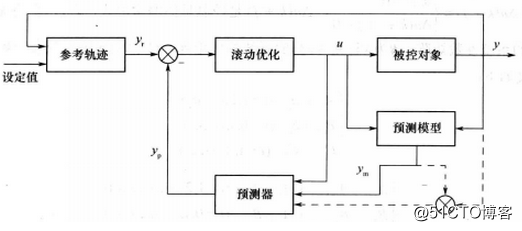
神经网络控制,可以把控制问题看成模式识别问题,被识别的模式映射成“行为”信号的“变化”信号。神经控制最显著的特点是具有学习能力。它是通过不断修正神经元之间的连接权值,并离散存储在连接网络中来实现的。它对非线性系统和难以建模的系统的控制具有良好效果。
深度学习方法,可以获得深层次的特征表示,免除人工选取特征的繁复冗杂和高维数据的维度灾难等问题,在特征提取与模型拟合方面具有很大优势。
由于自动驾驶系统需要尽量减少人的参与,因此深度学习自动学习状态特征的能力,让深度学习在自动驾驶系统的研究中更具优势。
Ξ 3.技术方案
根据从行驶环境到驾驶动作的映射过程,自动驾驶控制技术可以分为间接控制和直接控制两种不同方案。
1)基于规划- 跟踪的间接控制方法
自动驾驶间接控制方案可以简单概括为,根据当前车辆行为需求,在满足车辆自身运动学和动力学约束条件下规划出一条空间上可行且时间上可控的无碰撞安全运动轨迹,然后设计适当的控制律跟踪生成的目标轨迹,从而实现自主驾驶。
原理如下图所示: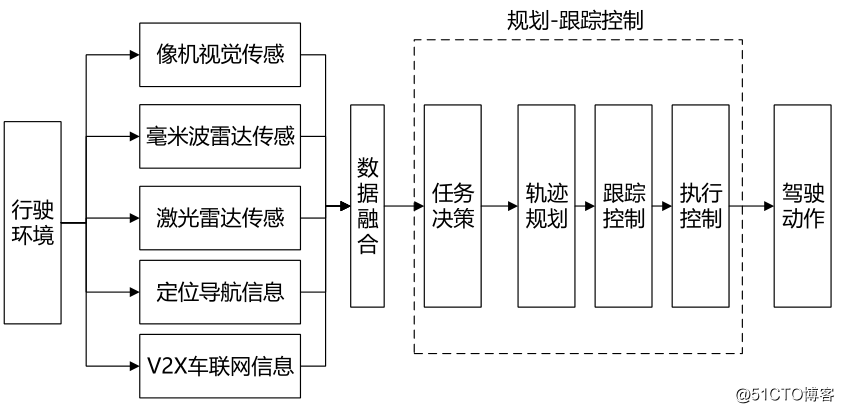
2)基于人工智能的直接控制方法
由于自动驾驶汽车行驶环境具有不确定性、不可重复性和不可预测性等特征,很难建立精确的数学模型进行控制律的设计,因此传统控制策略已无法满足自动驾驶驾驶控制的要求。
这样的背景下,基于人工智能的直接控制方法就成为目前自动驾驶控制系统的主流形式。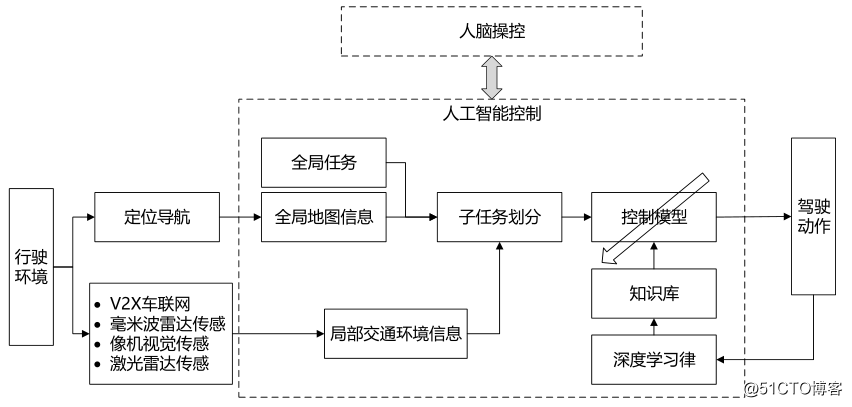
基于人工智能决策控制模型本质上是模拟人脑对外界环境信息和车体本身信息的感知,同时由驾驶经验并同在线学习机制来获得持续稳定输出的过程。
这种控制模式可以有效提升自动驾驶汽车在面对不同场景下的随机应变能力,代表着自动驾驶控制执行系统在未来一段时间内的主流发展方向。
本文参考资料:
1.《2017中国人工智能系列白皮书——智能驾驶》-中国人工智能学会
2.《2018年人工智能之自动驾驶研究报告》-Aminer